
Fターム[5H572BB04]の内容
Fターム[5H572BB04]に分類される特許
1 - 20 / 54
回転電機制御システム
【課題】回転電機制御システムにおいて、回転電機のステータコイルにパルス電流を流すことでロータコイルに誘導電流を発生させる構成で、インバータに入力される直流電圧の電圧変動を有効に抑制することである。
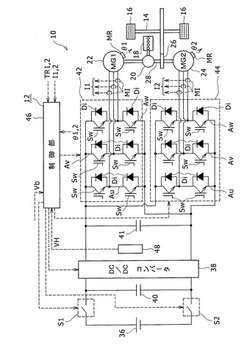
【解決手段】回転電機制御システム12は、バッテリ36に対して並列に接続される第1、第2インバータ42、44と、各インバータ42,44にそれぞれ接続される第1、第2モータジェネレータ22、24と、制御部46とを含む。第1モータジェネレータ22は、ステータコイルへ第1インバータ42から第1パルス電流を流すことで生じる磁束変化によって、ロータコイルに誘導電流を流す。制御部46は、第1パルス電流が生じるときに、第1パルス電流に伴って生じる直流電圧VHの変化を抑制するように、第2インバータ44から第2モータジェネレータ24に第2パルス電流を流すように制御する。
(もっと読む)
回転電機制御システム

【課題】回転電機制御システムにおいて、複数の回転電機の少なくとも1つにトルク変動が生じたときに、蓄電装置の入出力電力の変動を抑制することである。
【解決手段】回転電機制御システム10は、駆動用回転電機(MG2)12、発電用回転電機(MG1)14、MG2とMG1に共通の電源部16、MG2用の制御ブロック18、MG1用の制御ブロック19、MG2制御装置60、MG1制御装置62を含んで構成される。MG1制御装置62は、MG2のトルク変動を抑制するための変動抑制トルクのトルク位相を演算する変動抑制トルク位相演算部70と、変動抑制トルクのトルク振幅を演算する変動抑制トルク振幅演算部72と、演算された変動抑制トルクをMG1のトルク指令値に重畳し、これを変動抑制トルク指令値として演算する変動抑制トルク指令演算部74を含んで構成される。
(もっと読む)
一つの被駆動体を二つの電動機で駆動させる制御装置
【課題】二つの電動機間の機動力が互いに干渉することによって生じうる振動を抑制するために、二つのプロセッサで二つの電動機を制御することができる制御装置を提供する。
【解決手段】DSP11aは、取得した回転サーボモータ3aの速度値をDSP11bに送信するとともに回転サーボモータ3bの速度値をDSP11bから受信し、回転サーボモータ3aへのトルク指令に対する補正量を、回転サーボモータ3aの速度値と回転サーボモータ3bの速度値との速度値差に基づいて計算する。DSP11bは、取得した回転サーボモータ3bの速度値をDSP11aに送信するとともに回転サーボモータ3aの速度値をDSP11aから受信し、回転サーボモータ3bへのトルク指令に対する補正量を、回転サーボモータ3aの速度値と回転サーボモータ3bの速度値との速度値差に基づいて計算する。
(もっと読む)
電気車制御装置
【課題】アクティブサスペンションや軸ばねの可変特性といったハードウェアの追加や変更が不要で、加速度センサを用いることなく車体の振動乗り心地を改善する。
【解決手段】台車6に装荷された2台の電動機61がそれぞれ歯車を内蔵した駆動装置を介して2組の車輪を駆動することにより走行する電気車両であり、2台の電動機に逆方向のトルク変動を重畳することにより台車の上下振動を抑制し間接的に車体の振動抑制制御を行う電気車制御装置において、電気車制御装置の振動抑制制御は2台の電動機に逆方向の振動トルクを加えた際の台車の上下振動特性と2台の電動機に逆方向の振動トルクを加えた際の2台の電動機の回転速度差の振動特性をもとに構築され、2台の電動機の回転速度差情報を用いて台車振動を抑制する。
(もっと読む)
ハイブリッド車
【課題】内燃機関を始動する際の車両の振動を抑制すると共に内燃機関の始動完了までに要する時間の短縮を図る。
【解決手段】エンジンの始動が指示されたときには、エンジンの始動時に想定される第2のモータの駆動点を用いて、エンジンの始動時に正弦波制御モードで第2のインバータを制御する(制振制御を実行する)ことになる駆動電圧系の電圧としての始動時正弦波制御電圧VHsinを設定し(S410)、駆動電圧系の電圧VHが始動時正弦波制御電圧VHsinより低いときには(S430)、駆動電圧系の電圧VHを始動時正弦波制御電圧VHsin以上に上昇させた後に(エンジンの始動が指示されてから待機時間twtが経過したときに)(S480)、正弦波制御モードで第2のインバータを制御しながら第1のモータによってエンジンをモータリングして始動する。
(もっと読む)
モータ駆動電流アンプとモータ駆動装置とその駆動方法とモータ駆動システム
【課題】特性の異なる複数の種類のモータに対しても、信頼性高く良好に適用可能であり安定してモータを駆動できる、モータ駆動電流アンプとモータ駆動装置とその駆動方法とモータ駆動システムとを提供することを目的とする。
【解決手段】駆動対象となるモータへの出力電流リップルを検出する出力電流リップル検出部と、出力電流リップル検出部が検出した出力電流リップルに対応して、モータへの出力電流を制御する制御特性を変更するPID制御部と、PID制御部から出力信号が入力されて、PWM制御を遂行するPWM制御部と、PWM制御部から出力されるPWM信号に対応してスイッチング素子のオン・オフが制御されるフルブリッジ回路とを備えるモータ駆動装置とする。
(もっと読む)
プリンタの制御装置
【課題】複数のモータが駆動源として存在する駆動制御系において、コギングトルクリップルの影響を抑制し、速度変動等の影響を受け難いプリンタの制御装置を提供することを目的とする。
【解決手段】第1のモータ、第2のモータのそれぞれのコギングトルクリップルを抑制する補正値を加算した第1のフィードフォワード制御系と第2のフィードフォワード制御系とを設け、フィードバック制御系と上記第1のフィードフォワード制御系と上記第2のフィードフォワード制御系との組み合わせと、上記フィードバック制御系と第1のフィードフォワード制御系との組み合わせと、上記フィードバック制御系と上記第2のフィードフォワード制御系との組み合わせとのいずれかを選択する。
(もっと読む)
モータ制御装置および産業用ロボット
【課題】複数のモータの動作を制御するモータ制御装置において、複数のモータ各々に対して各々PWM制御を行う複数のインバータ部に供給する三角波キャリアの位相が同一であると、各インバータ部のスイッチング素子の動作が同期して大きなリプル電流が直流電源部を構成するコンデンサに流れ、コンデンサに悪影響を及ぼす。
【解決手段】複数のモータの動作を制御するモータ制御装置において、複数のモータ各々に対して各々PWM制御を行う複数のインバータ部と、前記複数のインバータ部に供給する動力を平滑する容量性素子を備え、各インバータ部はPWM制御の基本波形となる各三角波に基づいてPWM制御を行い、各インバータ部の各三角波の位相を全て異なるようにする。
(もっと読む)
部品実装機
【課題】装備されているモータが減速停止するときに生じる回生電力を有効利用して従来よりも消費電力を削減した部品実装機を提供する。
【解決手段】部品採取部材と基台との間に移動可能に介在されそれぞれモータ4X、4Zによって駆動される複数の移動部材2X、2Zを備え、部品採取部材が部品を採取および実装する部品実装機1において、各モータ3X、3Zが減速するときに運動エネルギを回生して生じた回生電力PR1〜PR3を制御する回生電力制御部6と、回生電力制御部6と電力をやりとりする各モータの電源部5X、5Zと、2つの移動部材2X、2Zが移動する場合に、一方の移動部材の減速停止の開始タイミングまたは減速停止中の所定タイミングに同期して他方の移動部材の始動加速を開始させ、一方のモータから得られる回生電力PR2を他方のモータの起動に利用する(駆動電力PZ)ように回生電力制御部6を制御する制御部7と、を備える。
(もっと読む)
サーボ制御方法及びサーボ制御装置
【課題】被駆動物の位置により伝達関数が変化し、位相が急激に遅れて不安定になることにより、ゲインを上げることが困難となる現象を防ぐことが可能なサーボ制御系を提供する。
【解決手段】本発明の1実施例に係る方法は、一つの被駆動物を複数のモータで駆動する送り駆動機構に適用されるサーボ制御方法であって、各モータの速度フィードバックを混合した信号を用いて前記被駆動物の速度制御を行い、前記速度制御により得られたトルク指令を全てのモータの駆動に使用する。
(もっと読む)
ヒートポンプ式乾燥機
【課題】効率がよく、騒音を低減することができるヒートポンプ式乾燥機を提供する。
【解決手段】乾燥を行なうための運転用モータと、冷媒を圧縮機で圧縮し、凝縮器で凝縮し、蒸発器で蒸発させるように循環させるヒートポンプと、前記凝縮器で加熱した空気を乾燥室に導いて内部の被乾燥物を乾燥させ、前記乾燥室からの排気を前記蒸発器で除湿した後前記凝縮器で再び加熱するように循環させる空気循環経路とを備え、制御回路30が前記圧縮機を駆動する圧縮機モータ31をインバータ回路47を介してPWM制御及びベクトル制御し、圧縮機モータ31に対するPWM制御のキャリア周波数を運転用モータに対するPWM制御のキャリア周波数よりも低く設定するように構成する。
(もっと読む)
電気車制御装置
【課題】アクティブサスペンションや軸ばねの可変特性といったハードウェアの追加や変更を不要とし、電力変換回路の数を抑制して車体の振動乗り心地を改善する。
【解決手段】車体が搭載される2台の台車のうち,前方の台車の前方の車輪を駆動する電動機と後方の台車の前方の台車を駆動する電動機とが並列接続され,前方の台車の後方の車輪を駆動する電動機と後方の台車の後方の車輪を駆動する電動機とが並列接続され,2組の並列接続した電動機の組み合わせに対し逆方向の振動トルクが重畳するように制御することにより電動機のトルク変動を用いて2台の台車に同一の上下力を発生させてそれぞれの台車の上下振動を抑制することにより車体が前後線対称形状に弾性変形する振動を間接的に抑制することを特徴とする電気車制御装置。
(もっと読む)
電気車駆動システム
【課題】アクティブサスペンションや軸ばねの可変特性といったハードウェアの追加や変更が不要で、車体の振動乗り心地を改善する手法が必要である。また、電動台車で容易に実現できる手法が望ましい。
【解決手段】車輪を有する台車の上に車体が搭載された電気車であり、台車に装荷された電動機が歯車を内蔵した駆動装置を介して車輪を駆動することにより走行する電気車両において、電動機のトルクにより車体の振動抑制制御を行う。また、台車振動を電動機の回転速度から演算した情報をもとに電動機のトルクにより台車振動を抑制し、間接的に車体の振動の抑制を行う。
(もっと読む)
モータ制御装置
【課題】複数のモータを駆動する場合でもモータに発生する振動を低減できるモータ制御装置を提供する。
【解決手段】モータ制御装置のコントローラは、双方のモータの回転角のずれ量が0度であって回転数が50rpmの場合には(ステップSA4でYES)、少なくとも一方のモータの駆動電流を制御してモータの回転速度を調整することにより、回転角のずれ量を180度に補正する。また、コントローラは、双方のモータの回転角のずれ量が180度であって回転数が25rpmの場合には(ステップSA7でYES)、少なくとも一方のモータの駆動電流を制御してモータの回転速度を調整することにより、回転角のずれ量を0度に補正する。
(もっと読む)
負荷駆動装置
【課題】2つのインバータ駆動の負荷を近接して設ける場合に、キャリア音を低減又は抑制する技術を提供する。
【解決手段】出力が略等しい第1及び第2インバータ10,20と、2つのインバータそれぞれが駆動し、互いに近接して設けられる第1及び第2三相負荷12,22とを備え、第1インバータのキャリア信号の周波数たる第1キャリア周波数C1と、第2インバータのキャリア信号の周波数たる第2キャリア周波数C2とは互いに略等しく、第1インバータのデューティ値と、第2インバータのデューティ値とは互いに略等しく、第1インバータと第2インバータとは同じスイッチングパターンで動作し、第1キャリア周波数と第2キャリア周波数との位相差が117.5度〜242.5度の範囲にある。
(もっと読む)
モータ制御装置
【課題】2つのロータの同時駆動時においてトルクリプル成分を低減させることが可能なモータ制御装置を提供する。
【解決手段】モータ制御装置1は、第1ロータが第1周波数の駆動電流で駆動され、第2ロータが第2周波数の駆動電流で駆動されている場合に、第1ロータの駆動電流に第2周波数の2倍の周波数に対し第1周波数を加算した周波数及び減算した周波数の少なくとも一方の電流を重畳し、第2ロータに第1周波数の2倍の周波数に対し第2周波数を加算した周波数及び減算した周波数の少なくとも一方の電流を重畳する。また、第1ロータの駆動電流に第2周波数の2倍の周波数に対し第1周波数を加算した周波数及び減算した周波数の少なくとも一方の電流を重畳するのみであってもよいし、第2ロータに第1周波数の2倍の周波数に対し第2周波数を加算した周波数及び減算した周波数の少なくとも一方の電流を重畳するのみであってもよい。
(もっと読む)
バックラッシュを抑制するサーボ制御装置
【課題】ポジションタンデム制御のモータ制御装置においてプリロードを付加することで、ショックを抑えることができるサーボ制御装置を提供する。
【解決手段】1つの被駆動体を駆動する2台のモータ15,25と、位置偏差値を演算処理して速度指令値を出力する位置制御部11,21と、速度指令値と速度検出器17,27から帰還される速度フィードバック値とに基づいて積分要素と比例要素で処理してトルク指令値を出力する速度制御部12,22と、トルク指令値に基づきモータの駆動電流を制御する電流制御部13,23と、速度制御部12,22の一方の積分要素の出力を他方の積分要素にコピーする速度積分器共通化手段5と、2台のモータ間のバックラッシュを抑制するために、各々のトルク指令値にそれぞれプリロードトルク値を付加する補正部6を備え、補正部は時定数回路を有し、プリロードトルク値を所定時定数に基づき徐々に付加する。
(もっと読む)
アクチュエータ
【課題】簡素な制御により、迅速でスムーズな加減速により高速度化を実現できる、直線案内軸受装置などに用いられると好適なアクチュエータを提供する。
【解決手段】第1駆動モータ109を目標速度に追従する速度制御とし,第2駆動モータ110は、第1駆動モータ109の実際の速度に追従するような速度制御を行うことにより,相互の動作が干渉しない形で2つの駆動モータ109,110をともにフィードバック制御することが可能となる。さらに第2駆動モータ110の速度制御において、第1駆動モータ109の指令値をフィードフォワードとして加えることで,制御による位相遅れを少なくしている。これにより制御の応答性,減衰性が向上するという利点がある。
(もっと読む)
回転電機制御システム
【課題】2つの回転電機の制御システムにおいて、一方側の制御の電気一周期の電気6次と他方側の制御の電気一周期とが同期する場合に、回転電機の制御性の低下を抑制することである。
【解決手段】回転電機制御システム10は、2つの回転電機12,14と、2つのインバータ28,30と、MG1制御部50、MG2制御部60とを含んで構成される。MG2制御部60は、第2の回転電機14の電気6次の影響が第1の回転電機12の矩形波制御に影響するか否かの判断を行う電気6次判断モジュール64と、電気6次の影響があると判断されたときに第2の回転電機14の制御におけるゲインを変更するゲイン変更モジュール66と、第2の回転電機14の制御におけるキャリア周波数を変更するモジュール68を含んで構成される。
(もっと読む)
同期制御装置
【課題】高周波のノイズ成分を増大させることなく主状態量のフィードバック値に含まれる位相の遅れ分をキャンセルするように位相を進め,現在の正確な主状態量が得られなくても,従制御対象の状態量を振動や遅れなく精度良く主制御対象の状態量に追従できる同期制御装置を提供する。
【解決手段】 主状態量が主状態量指令に一致するように主操作量を生成する主制御器と,前記主状態量と前記従状態量が同期するように従状態量指令を生成する従状態量指令生成器と,従状態量が従状態量指令に一致するように従操作量を生成する従制御器と,を備えた同期制御装置において,従状態量指令生成器は,主操作量と前記主状態量に基づいて主状態量よりも位相の進んだ位相進み主状態量を生成する位相進み補償演算器(11)と,位相進み主状態量を前記従状態量指令に変換する指令変換器(15)とを備えた
(もっと読む)
1 - 20 / 54
[ Back to top ]