
Fターム[5H572JJ02]の内容
Fターム[5H572JJ02]の下位に属するFターム
計算機を用いるもの (282)
Fターム[5H572JJ02]に分類される特許
1 - 20 / 33
電力変換装置
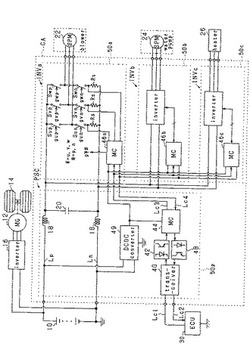
【課題】複数のインバータINVa,INVb,INVcのそれぞれを操作する変換用マイコン46a,46b,46cのそれぞれにECU30からの指令値情報を出力する場合、通信手段の数が増加し、ひいては装置の大型化やコストアップを招くおそれがあること。
【解決手段】ECU30は、インバータINVa,INVb,INVcのそれぞれに関する指令値を、外部通信線Lc1およびフォトカプラ42を介して通信用マイコン44に出力する。この際の通信プロトコルは、LINである。通信用マイコン44では、受信されたデータのフォーマットをI2Cに変更し、これを変換用マイコン46a,46b,46cに出力する。
(もっと読む)
一つの被駆動体を二つの電動機で駆動させる制御装置

【課題】二つの電動機間の機動力が互いに干渉することによって生じうる振動を抑制するために、二つのプロセッサで二つの電動機を制御することができる制御装置を提供する。
【解決手段】DSP11aは、取得した回転サーボモータ3aの速度値をDSP11bに送信するとともに回転サーボモータ3bの速度値をDSP11bから受信し、回転サーボモータ3aへのトルク指令に対する補正量を、回転サーボモータ3aの速度値と回転サーボモータ3bの速度値との速度値差に基づいて計算する。DSP11bは、取得した回転サーボモータ3bの速度値をDSP11aに送信するとともに回転サーボモータ3aの速度値をDSP11aから受信し、回転サーボモータ3bへのトルク指令に対する補正量を、回転サーボモータ3aの速度値と回転サーボモータ3bの速度値との速度値差に基づいて計算する。
(もっと読む)
押出プレス
【課題】押出プレスにおける油圧回路を構成する油圧機器や油圧ポンプを駆動する電動機、制御機器などの動的・熱的疲労度合の不均一を解消し、前記各構成機器の動的・熱的疲労度合及び余寿命を平準化するとともに、省エネルギー効果に優れた押出プレスを提供すること。
【解決手段】複数台の可変容量型の油圧ポンプが並列に接続されて押出プレスの油圧シリンダに作動油を供給し、予め設定した作動速度に基づき油圧ポンプの必要吐出量を求めて前記油圧ポンプを選択的に駆動制御する押出プレスにおいて、前記選択的に駆動制御される油圧ポンプの選択順序が、所定の成形サイクル数を完了したときに順送りするプログラムで制御される。
(もっと読む)
複数のDCファンの回転状態を監視する方法および装置
【課題】 設置した複数のDCファン全ての運転状態を個別に監視する用途において、既存のDCファンが使用可能で、配線数を削減でき、ノイズの影響を受けづらく、部品数が少なく信頼性が高く、安価で、設置時の煩雑さを軽減できる、回転速度監視方法および装置を提供する。
【解決手段】 1台の制御装置3のみ、あるいは複数のグループ制御装置51,52、・・・5gを設け、制御装置3または5に接続された複数のDCファン11,12・・・1nの電流を検出するセンサR1,R2,・・・Rnを設置して、データ切替手段8によって、順番に電流脈動から各DCファンの回転速度を検出したうえで、基準回転数と比較して正常か異常かを判定し、グループ識別コードを用いて全てのDCファンの運転状態を上位主制御機に対して通信手段を用いて伝達する方法および装置にある。
(もっと読む)
サーボ制御装置およびモーションコントロールシステム
【課題】送受信の配置の衝突が繰り返される間、モーションコントロールシステム全体の初期化が遅延する。
【解決手段】第一の通信手段106はMDI結線、第二の通信手段107はMDI−X結線とすることで、通信ケーブル4としてストレートケーブルを選択した場合、主電源を入れ、夫々のサーボ制御装置1の電源が同時に入るとき、夫々のサーボ制御装置1同士の接続において、送受信ペアの衝突が発生しないようにすることが可能となる。
(もっと読む)
画像形成装置、モータ制御装置及びそのモータ制御方法
【課題】
本発明は、画像形成装置、モータ制御装置及びそのモータ制御方法に関し、複数のBLDCモータを効率的に駆動制御できる画像形成装置、モータ制御装置及びそのモータ制御方法を提供することにある。
【解決手段】
画像形成装置が開示される。本画像形成装置は、画像形成のジョブを行うのに使用されるエンジン部と、エンジン部の動作を制御するエンジン制御部と、エンジン部を起動させる複数のBLDCモータと、エンジン制御部から複数のBLDCモータに対するデジタル制御命令を受信する通信インターフェース部と、複数のBLDCモータの駆動情報を検知するセンサ部と、複数のBLDCモータを制御するための駆動信号を生成する駆動信号部と、受信されたデジタル制御命令及びセンサ部の検知結果に応じて前記駆動信号部の動作を制御する速度制御部と、を含む。
(もっと読む)
画像形成装置
【課題】回転多面鏡における回転速度の微調整幅の高分解能化と、回路の規模の簡略化とを両立させる。
【解決手段】回転状態検知手段は、回転多面鏡の回転状態を検知し、回転状態を示す回転状態信号を出力する。第1クロック生成手段は、第1クロックを生成する。回転基準信号生成手段は、第1クロックにしたがって順序回路動作を行い、回転多面鏡の回転基準となる回転基準信号を生成する。第2クロック生成手段は、回転基準信号の周期よりも短く、かつ、第1クロックの周期よりも長い周期の第2クロックを生成する。受信手段は、第2クロックにしたがって順序回路動作を行い、回転基準信号を受信する。位相差測定手段は、第2クロックにしたがって回転状態信号と回転基準信号との位相差を測定する。制御手段は、位相差に基づいて駆動手段に加速信号または減速信号を供給する。
(もっと読む)
サーボモータ制御システム及びサーボモータユニット
【課題】集中制御ユニットからの通信指令によりサーボモータを制御するシステムにおいて、モータの原点位置補正を行なう際に、通信デッドタイム期間内のモータ位置ずれの影響を受けにくくする。
【解決手段】サーボモータユニット4側に設けられた原点検出手段8がモータ5の回転にかかる原点位置を検出するに伴い、回転位置演算手段9による現在回転位置の演算値を、該サーボモータユニット内にて予め用意された原点値にリセット補正する現在回転位置補正手段を設ける。サーボモータユニット4は、原点検出した場合、その原点に対応する正しい現在回転位置を集中制御ユニットから通信で受け取るのではなく、サーボモータユニット4内にて予め用意された原点値(つまり、原点に対応する正しい現在回転位置)を用いて現在回転位置の演算値をリセット補正する。
(もっと読む)
複数のサーボモータの制御方法
【課題】要求性能の高いサーボモータ、要求性能の低いサーボモータ夫々に対応した制御処理を行なう。
【解決手段】各々異なる駆動対象を駆動する複数のサーボモータ16〜20を所定の制御周期T毎に制御する際に、要求性能が低い駆動対象(R軸、W軸)のサーボモータが、オフ又は不使用とされた場合には前記要求性能が低い駆動対象の制御処理を中止し、その空き時間を利用して、要求性能が高い駆動対象(X軸)のサーボモータの制御処理を実行する。
(もっと読む)
平面モータ装置およびこの平面モータ装置を用いた位置決め装置
【課題】モータ電流指令値と実際電流との偏差が大きくても、加減速時など正常なドライバ動作時には電流偏差信号過大と認識しない、安定したインタロック機能を備えた平面モータおよびこの平面モータを用いた位置決め装置を実現する。
【解決手段】移動面に形成された固定子と、前記移動面に沿って移動する可動子とを備えた平面モータ装置において、前記可動子のモータ部10,11,12と、電流指令値Imu*,Imv*,Imw*が入力され、これらの電流指令値に応じたモータ電流Imu,Imv,Imwをモータ部に供給するドライバ部20,21,22と、電流指令値とモータ部に流れるモータ電流との電流偏差信号ΔImu,ΔImv,ΔImwが所定の閾値を超えたときにモータ部の駆動を制限する検出部30,31,32とを備え、検出部は、モータ部の加速度に応じ前記閾値を変化させる。
(もっと読む)
交流電動機の監視装置
【課題】電流振幅の影響を受けにくく、検出精度の高い交流電動機の監視装置を得る。
【解決手段】交流電源2から複数のヒステリシスモータ3にそれぞれ流れる個別電流を検出する個別電流検出手段例えば個別電流検出器5と、交流電源2から交流電動機3全体に流れる全電流を検出する全電流検出手段例えば全電流検出器4と、全電流検出器4及び個別電流検出器5によって同時に検出された電流検出値のうち、全電流検出値を基準とし、個別電流検出値との電流位相差がヒステリシスモータ3によって決められる異常判定レベル(規定値)を超えた時、ヒステリシスモータ3が異常と判定する判定手段例えば監視回路7を備えたもの。
(もっと読む)
通信システム
【課題】スレーブ制御手段およびこれが制御するアクチュエータの大型化を抑制しつつ、スレーブ制御手段およびアクチュエータを共通化することが可能な通信システムを提供すること。
【解決手段】各アクチュエータ制御ユニットは、マスタECUから多重通信のためのアドレスの設定を指示された場合には(510)、ドアサーボを作動して接続した各ドアを駆動し(520、530)、ドアサーボ出力軸の回転作動方向両端側の作動限界位置から回転量を検出し(540)、検出した回転量をマスタECU内に予め設定された回転量とアドレスとの対応関係に照合し(550)、各ドアサーボに接続したそれぞれのドアに対応したアドレスを特定して設定する(560)。
(もっと読む)
負荷駆動制御回路
【課題】ダイアグの配線系に異常が生じたとしても、この時に負荷を誤動作し難くすることができる負荷駆動制御回路を提供する。
【解決手段】3ブリッジ式モータ駆動回路8には、このモータ駆動回路8を統括制御するシステム制御回路9と、ドライバとして働いて2つのモータM1,M2を回転駆動する駆動制御回路10とが設けられている。システム制御回路9と駆動制御回路10との間には、複数の信号線から成るダイアグ線S3が設けられている。駆動制御回路10は、自身がスリープモードの際、全ダイアグ配線出力がL状態のダイアグ確認通知Sk1をシステム制御回路9に出力し、自身がスタンバイモードの際、全ダイアグ配線出力がH状態のダイアグ確認通知Sk2をシステム制御回路9に出力し、システム制御回路9にダイアグ線L3の故障有無を確認させる。
(もっと読む)
XYステージ
【課題】 連続配置された2個のプラテン夫々に適正な補正信号を切り替えて出力すると共に、プラテン接続部近傍の補正信号を適正値に計算して出力可能なXYステージを実現する。
【解決手段】 互いに一辺を接して同一面に連続配置された第1のプラテン及び第2のプラテンと、
これらプラテン上でX軸モータ及びY軸モータへ供給する交流信号によりX軸方向又はY軸方向に移動制御されるスライダと、
前記スライダが前記第1のプラテン上にあるときに前記交流信号の転流位相角に基づいて算出される第1の補正信号により前記スライダに発生するコギング推力に起因するリップル又は推力リップルを抑制する第1のリップル抑制手段と、
前記スライダが前記第2のプラテン上にあるときに前記交流信号の転流位相角に基づいて算出される第2の補正信号により前記スライダに発生するコギング推力に起因するリップル又は推力リップルを抑制する第2のリップル抑制手段と、
を備える。
(もっと読む)
モータ制御用シリアル通信装置
【課題】通信回線に異常が発生した場合でも、モータのサーボ特性を劣化させることなく同期駆動させることが可能なモータ制御用シリアル通信装置を提供する。
【解決手段】モータ駆動装置1209〜120nは、上位側装置と互いにシリアルに接続されデータを相互に送受信してモータ1009を駆動する。通信ケーブル1201に断線が発生したとき、上位制御装置から制御指令信号が入力されなくなる最上位のモータ駆動装置1209が、上位制御装置に代わって、モータ駆動装置1209〜120nを同期させる同期信号を出力し、各モータ駆動装置により駆動されるモータ1009を同期駆動させる。このような構成では、サーボ特性を劣化させることなく、各モータを同期して停止させたりあるいは目標位置に移動させることができ、安全性に優れたモータ制御が実現される。
(もっと読む)
シャフトレス輪転印刷機における同期制御装置および同期起動方法
【課題】輪転印刷機を停止状態から速やかに起動させ、起動時に機械の振動、ギヤ鳴り、及び連続紙の破断や弛みの発生を解消して速やかに同期制御に移行させること。
【解決手段】輪転印刷機の同期制御システムにおいて、集中制御装置01にバーチャル回転指令発生装置0101を、印刷機、折り機の同期駆動装置に位相指令検出装置0601、位相FB検出装置0602、0603を設置する。また、折り機に周期的な負荷変動の影響を抑止する回転補償器を設置する。そして始めは徐動速度にて滑らかに運転し、安定となった徐動運転中に折り機の位相FB検出装置0603の出力をバーチャル回転指令発生装置0101にプリセットした後、各印刷機と折り機の位相制御をオンとする。これにより、折り機は原点合わせ動作を必要とせず同期制御へ移行し、各印刷機は原点合わせゲインGzを用いて滑らかに原点合わせを行った後同期制御へ移行する。
(もっと読む)
位置検出器をマルチドロップ接続した多軸制御システム
【課題】 多軸制御システムの統括CPUの負荷をサーボ制御回路に分散させるとともに、そのCPUを経由しないでマルチドロップ接続された位置検出器からの位置情報をサーボ制御回路に与える。
【解決手段】 コントローラにマスタ通信回路を設置し、位置検出器にはスレーブ通信回路を設置することで、位置検出器の信号線をマルチドロップ接続できるようにするとともに、マスタ通信回路とサーボ制御回路間に専用の信号線を配線する。また、サーボ制御回路を複数軸分統合する。さらには、マスタ通信回路をも統合する。
(もっと読む)
モータ駆動集積回路
【課題】モータを安定駆動し、回路の面積及びコストを削減する。
【解決手段】モータ駆動集積回路は、直列に接続された第1及び第2トランジスタと、直列に接続された第3及び第4トランジスタと、直列に接続された第5及び第6トランジスタと、一端が前記第3及び第4トランジスタの接続点と接続された第7トランジスタと、第1及び第2トランジスタの接続点に第1コイルの一端を接続するための第1コイル接続端子と、第3及び第4トランジスタの接続点に第1コイルの他端を接続するとともに、第3及び第7トランジスタの接続点に第2コイルの一端を接続するための第2コイル接続端子と、第5及び第6トランジスタの接続点に第2コイルの他端を接続するための第3コイル接続端子と、第1コイルに流れる電流を検出するための抵抗を接続するための電流検出抵抗接続端子とを備える。
(もっと読む)
アクチュエータシステム及びアクチュエータ装置
【課題】複数が同時に駆動される際の振動及び作動音の増大を抑えることができるアクチュエータシステムを提供する。
【解決手段】アクチュエータシステムは、それぞれアドレスが設定される複数のアクチュエータ装置A1,A2を備える。各アクチュエータ装置A1,A2は、共通の通信線を介して入力される制御信号に基づいてそれぞれ独立して駆動される。そして、アクチュエータ装置の内の複数を同時に駆動する際は、それらの駆動速度を低速とする。例えば、アクチュエータ装置A2が高速駆動している状態で、アクチュエータ装置A1を駆動する場合、アクチュエータ装置A1は、低速駆動中信号を出力して駆動せず待機する。アクチュエータ装置A2は、アクチュエータ装置A1からの低速駆動中信号が入力されると、自身を低速駆動して低速駆動中信号を出力する。すると、アクチュエータ装置A1は、低速駆動を開始する。
(もっと読む)
モータ駆動装置
【課題】モータ駆動装置において不要輻射の発生を抑える。
【解決手段】 インバータ回路30Aは、電機子巻線Aおよびグランドの間をオン、オフするとともに、電機子巻線Bおよびグランドの間をオン、オフする。電機子巻線Aおよびグランドの間がオンする期間と電機子巻線Bおよびグランドの間がオンする期間とが重なっている。したがって、増幅回路36から電機子巻線Aへの通電と増幅回路36から電機子巻線Bへの通電とが交互に行われ、電機子巻線A、Bにより回転磁界を発生するので、この回転磁界によって回転子が回転する。電子制御装置40からのパルス信号P0のデューティ比が大きくなるほど、増幅回路36の出力電圧のレベルが大きくなる。このため、モータ駆動装置10Aは、ブラシレスモータMO2の回転数を制御するに際して、発振回路を用いていない。
(もっと読む)
1 - 20 / 33
[ Back to top ]