
Fターム[5H680BB13]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 種類、型式 (3,145) | 直線運動するもの (616)
Fターム[5H680BB13]に分類される特許
161 - 180 / 616
超音波モータおよび超音波モータ装置

【課題】圧電振動子を従来とは異なる辺比で構成すると共に、構造が簡単であり、十分な推力を発生する。
【解決手段】矩形型の圧電振動子1が、第一次縦振動モードと第二次屈曲振動モードとを組み合わせた多重振動モードで振動することにより駆動力を発生する超音波モータであって、圧電振動子1が第一次縦振動モードで振動する際の伸縮方向の長さをLとし、圧電振動子1が第二次屈曲振動モードで振動する際の剪断方向の長さをwとした場合に、圧電振動子1は、w/Lの値が実質的に0.26となるように形成されており、圧電振動子1の長手方向の両端部に2つの摺動チップ1cを設けた。また、圧電振動子1の主面上1bに4枚の電極4a、4bを設け、電極4aに対して交流電圧を印加して圧電振動子1を駆動させる交流電源5aと、を備える。
(もっと読む)
駆動装置

【課題】 駆動回路の複雑化等を招くことなく、消費電力を可及的に抑制して電池電源で有効に駆動することができるようにする。
【解決手段】 圧電素子26にその一方側から第1の極性の駆動電圧を印加して充電する第1スイッチ回路141及び第4スイッチ回路144からなる第1の駆動回路と、圧電素子26にその他方側から第1の極性とは逆極性の駆動電圧を印加して充電する第2スイッチ回路142及び第3スイッチ回路143からなる第2の駆動回路と、各駆動回路により圧電素子26に充電された電荷を抵抗を介して放電する第2スイッチ回路142及び第4スイッチ回路144からなる放電回路とを備え、第1の駆動回路と第2の駆動回路とを交互に駆動させると共に、第1の駆動回路の駆動期間と第2の駆動回路の駆動期間との間に放電回路を駆動させる。
(もっと読む)
駆動装置の駆動方法
【課題】移動部材の移動をスムーズに行わせること。
【解決手段】伸縮方向で互いに対向する一対の端面を持つ電気機械変換素子(13)と、この電気機械変換素子の一対の端面の一方(13b)に取り付けられた振動摩擦部(14)と、この振動摩擦部と摩擦結合される移動部材(121,122)と、電気機械変換素子(13)の一対の端面の一方(13b)と振動摩擦部(14)の端面との間に配置された振動伝達部材(19)とを備え、電気機械変換素子の伸縮方向に移動部材が移動可能な駆動装置(10)の駆動方法において、電気機械変換素子(13)を鋸歯状波に往復変位させ、この電気機械変換素子の往復変位を振動伝達部材(19)を介して振動摩擦部(14)に伝達させ、それによって、移動部材(121,122)を所定の方向にリニア駆動する。
(もっと読む)
軸の接着方法および振動型駆動装置の製造方法
【課題】振動軸への接着剤の這い上がりを低減できる振動型駆動装置の製造方法を提供する。
【解決手段】電圧が印加されると伸縮する電気機械変換素子2と、電気機械変換素子2に一端が接着され、電気機械変換素子2の伸縮によって軸方向に変位する振動軸3と、振動軸3に滑り変位可能に摩擦係合する摩擦係合部材4とを有する振動型駆動装置1の製造方法において、振動軸3の電気機械変換素子2への接着は、電気機械変換素子2の端面に接着剤を盛り付け、接着剤に圧縮ガスを吹き付けて接着剤を押し広げ、押し広げた接着剤の上に振動軸3を配置して、接着剤を硬化させる。
(もっと読む)
ステージ機構
【課題】装置を大型化することなく、安価に磨耗粉の飛散を防止する。
【解決手段】ステージ機構は、固定台1と、固定台1に対して移動軸方向に移動可能に支持された移動体3と、高周波電圧信号により複数のモードを励起する振動体12と、振動体12に設けられた複数の突起部15(15a,15b)と、振動体12を固定台1に対して保持すると共に、複数の突起部15と移動体3とを所定の押圧力で接触させる保持部材11とを備え、複数の突起部15と移動体3との接触部下方の固定面には、粘着材としてグリス8が設けられる。
(もっと読む)
圧電アクチュエータ
【課題】圧電アクチュエータを小型化できるようにする。
【解決手段】圧電体と、該圧電体の伸縮動作に基づいて軸方向変位する駆動部材と、前記駆動部材に所定の摩擦力で係合されて移動可能にされた被駆動部材とを備えて構成される圧電アクチュエータにおいて、前記圧電体の共振周波数に対して、約1周期分の駆動時間(a−c)と、約半周期分の駆動時間(c−d)との内、前記被駆動部材の移動方向が前記分極方向と同方向である場合には、前記約1周期分の駆動時間を前記第2の駆動手段に、前記約半周期分の駆動時間を前記第1の駆動手段にそれぞれ設定し、前記被駆動部材の移動方向が前記分極方向と逆方向である場合には、前記約1周期分の駆動時間を前記第1の駆動手段に、前記約半周期分の駆動時間を前記第2の駆動手段にそれぞれ設定し、第1の駆動手段と第2の駆動手段とを交互に駆動して圧電体を充電させる。
(もっと読む)
超音波電動ステージ
【課題】操作性及びデザイン性を向上させると共に、超音波モータ駆動時に発生する磨耗粉による変位センサの誤作動を防止する。
【解決手段】超音波電動ステージは、ベース部1と、Yテーブル2と、Xテーブル3と、Yテーブル2を駆動するリニア式超音波モータ6と、Yテーブル2の移動量を検出する光学式リニアセンサ7と、Xテーブル3を駆動するリニア式超音波モータ4と、Xテーブル3の移動量を検出する光学式リニアセンサ5とを備える。ここで、リニア式超音波モータ6、光学式リニアセンサ7、リニア式超音波モータ4、及び光学式リニアセンサ5は、Xテーブル3の上面よりも上方に迫り出すことなく、当該超音波電動ステージの前面以外の位置であって、且つ、リニア式超音波モータ6及び又は4の駆動時に発生する磨耗粉が光学式リニアセンサ7及び5に悪影響を及ぼさない位置に配置される。
(もっと読む)
振動波モータ
【課題】異常な振動音を発生させることなく、振動体の振動を効率良く移動体に伝達することができる振動波モータを提供する。
【解決手段】振動波モータは、振動体11に振動波を生じさせ、この振動体11に加圧接触する移動体31を摩擦力により相対移動させる。移動体31は、振動体11が接触する部分31aの剛性が、該振動体11が接触しない部分の剛性より低く、かつ振動体11が接触する部分31aが、振動体11の加圧方向に弾性変形可能とされている。
(もっと読む)
振動型アクチュエータ制御装置、レンズ鏡筒、撮像装置、振動型アクチュエータの制御方法、振動型アクチュエータの制御プログラム
【課題】目標位置に正確に停止させることができる振動型アクチュエータ制御装置、レンズ鏡筒、撮像装置、振動型アクチュエータの制御方法、振動型アクチュエータの制御プログラムを提供する。
また、個体差、負荷条件、環境条件等によらず駆動時に発生する音を低減できる振動型アクチュエータ制御装置、レンズ鏡筒、撮像装置、振動型アクチュエータの制御方法、振動型アクチュエータの制御プログラムを提供する。
【解決手段】伝達機構210のバックラッシュが解消するまでの超音波モータ206の掃引レートと、解消後の掃引レートとを変更する。さらに、加速掃引時の移動量から減速に要する移動量を予測することで、減速開始位置を決定する。
(もっと読む)
駆動装置及びそれを備えた撮像装置
【課題】部品点数を従来よりも減少させることができる駆動装置を提供すること。
【解決手段】オートフォーカスカメラ10は、フォーカスレンズ11を移動させる移動部13cと、凸部14及び機械端部15と、マイコン部24と、カウンタ28とを備え、マイコン部24は、移動部13cを移動させる移動制御モードと、移動制御モードより前に行われる初期化モードとを動作モードとして有し、初期化モードにおいて、機械端部15のいずれかの位置に凸部14が当たるよう移動部13cを移動させてカウンタ28を予め定めた値に設定する機械端移動動作を行った後、移動方向を反転して予め定めた電力供給時間で移動部13cを移動させた位置を移動制御モードの原点とするものであって、移動制御モードにおいて、カウンタ28のカウンタ値に基づいて移動部13cの位置決め制御を行う構成を有する。
(もっと読む)
駆動装置及び光学装置
【課題】圧電アクチュエータの駆動特性を考慮して被駆動部材を精度良く移動させることができる駆動装置及び光学装置を提供する。
【解決手段】圧電素子1に駆動軸2を取り付けたアクチュエータ10を有し、駆動信号により圧電素子を伸縮させ、圧電素子1の伸縮動作に応じて駆動軸2を往復運動させて、駆動軸2に摩擦係合させた被駆動部材3を移動させる駆動装置において、被駆動部材3が移動する移動範囲Z内を複数の領域Z1〜Z10に分割して、被駆動部材3の移動速度が移動範囲Z内で同一となるように、複数の領域Z1〜Z10ごとに駆動信号の波形を変更する制御部81を備えることで、被駆動部材3の摩擦係合位置に依存した速度の違いを小さくすることができる。よって、被駆動部材3の駆動制御を正確に行ない、被駆動部材3を精度良く移動させることができる。
(もっと読む)
減電圧リニアモータシステムおよびその方法
リニアモータシステムが、螺刻された通路を有する要素と、螺刻されたシャフトと、駆動システムとを含む。螺刻されたシャフトは、螺刻された通路の少なくとも一部を通して延在しかつそれと少なくとも部分的に係合されている、回転軸を有する。駆動システムは、要素に動作可能に接続された少なくとも2つの部材を備える。2つの部材はそれぞれ、2つ以上の圧電層と、圧電層のそれぞれの対向する表面に連結されている電極とを備える。部材は、回転軸に沿った方向に拡張および収縮するように構成されている。駆動システムは、要素に振動を与え、螺刻されたシャフトを、要素を通して、同時に、回転、および回転軸に沿った方向に平行移動させ、かつ回転軸に沿った方向に軸方向力を印加するように構成されている。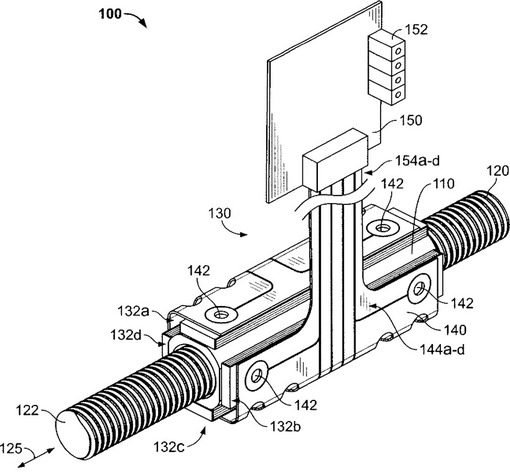
 (もっと読む)
(もっと読む)
多数の圧電アクチュエータを使用するアクチュエータシステム
【課題】摩擦を比較的低レベルとし剛性を比較的高レベルとしつつ光学デバイスの1つまたは複数の光学素子を高精度かつ高信頼性に位置決めするシステムを提供する。
【解決手段】位置決めシステムは、可変ズームレンズシステム等の光学デバイス内の光学素子の位置を調整する。フレームが光学素子を支持し、細長支持構造の細長表面がそのフレームを支持する。フレームは細長支持構造に係合する圧電アクチュエータも支持する。制御部は圧電アクチュエータを駆動する制御信号を供給する。駆動されたアクチュエータモジュールの圧電素子は、細長支持構造の細長表面に第1及び第2の力を組み合わせて作用させ、細長表面に対しフレームを位置決めする。圧電素子により与えられた力の組合せによって、細長支持構造に対し圧電アクチュエータが前進する。
(もっと読む)
超音波リニアモータ
【課題】少数で構造が簡単なパーツにより、製造時に他の素子と容易に統合でき、加工コストを低減させられる超音波リニアモータを提供する。
【解決手段】基板と、前記基板上に設けられ、両側に形成された斜面又は曲面と前記基板の表面とで凹状の収容部を形成してなる振動部材と、両側に前記収容部に対向して介在された挟持部が設けられたスライド部材と、を備え、前記振動部材は電源に接続され、駆動動力を前記スライド部材に生成することで、前記スライド部材の挟持部を前記収容部内にスライドさせ、リニア運動を生成する。
(もっと読む)
圧電振動子の保持装置
【課題】振動エネルギーの損失および振動特性の変化がなく、高効率で安定に出力の供給が可能な圧電振動子の保持装置を提供する。
【解決手段】圧電振動子の保持装置において、圧電振動子1を離隔して収容する枠形または箱形の支持部材11と、この支持部材11の側部と圧電振動子1との間に介在される板ばね構造体12とを有し、この板ばね構造体12は、支持部材11の片側部に固着された基端部から圧電振動子1の対向両側部を挟むように圧電振動子の側部をまたいで折り返されて該圧電振動子に固着された第1の板ばね部材13と、支持部材11の他方の片側部に固着された基端部から圧電振動子1の対向両側部を挟むように圧電振動子1の側部をまたいで折り返されて該圧電振動子に固着された第2の板ばね部材18とを有し、第1の板ばね部材13と第2の板ばね部材18が圧電振動子1との固着部分で一体化されている。
(もっと読む)
駆動装置
【課題】電気―機械変換素子から駆動部材への振動伝達において、エネルギー損失が少なく被駆動部材を効率的に高速移動できること、耐落下・衝撃性の要求に応えられる圧電素子の取付け構造を実現できることのメリットを有する駆動装置を提供すること。
【解決手段】電気―機械変換素子11と、電気―機械変換素子11の振動方向の側方へ離れている駆動部材12とを、振動伝達部材13Fを介して連結し、電気―機械変換素子11を振動させ駆動部材12に増幅した振動を伝達し更に駆動部材12より摩擦係合部材15を介して被駆動部材14を高速で往復動させ得る駆動装置であり、振動伝達部材13は、短片部13aと長片部13bの同側の一端同士が連結部13cで連結された一体形状であって、短片部13aが保持部材16Aに固定され、電気―機械変換素子11の振動方向の両端面を短片部13aの他端と長片部13bの対向部位間に挟んで固着され、電気―機械変換素子11の振動を駆動部材12に伝える。
(もっと読む)
駆動装置およびそれを備えた電子機器
【課題】摩擦係合部材と被駆動体との間で作用する摩擦力が安定であり、かつ、与圧がかけられた状態であっても被駆動体の駆動速度を安定にすることができる駆動装置を実現する。
【解決手段】本発明の駆動装置は、屈曲変位部材1と、被駆動体3と摩擦係合し、被駆動体3を、屈曲変位部材1における固定端Oと自由端O’とを結ぶ直線方向に駆動させる摩擦係合部材2と、摩擦係合部材2と被駆動体3とを一定の力で押し付けるための予圧機構とを備え、屈曲変位部材1の固定端Oと被駆動体3とを最短で結ぶ仮想線Lと被駆動体3との交点を交点Lcとし、屈曲変位部材1の自由端O’と被駆動体3とを最短で結ぶ仮想線L’と被駆動体3との交点を交点Lc’としたとき、摩擦係合部材2における被駆動体3との接触部21は、交点Lcと交点Lc’とを結んだ仮想線LcLc’上に位置するとともに、交点Lc’よりも交点Lcに近い位置に配されている。
(もっと読む)
圧電素子の駆動装置、超音波アクチュエータ装置
【課題】装置の小型化を阻害することなく、また、装置の複雑化と高価格化を招くことなく、優れた駆動性能を得ることが可能な圧電素子の駆動装置、及び超音波アクチュエータ装置を提供する。
【解決手段】駆動信号により変位する圧電素子の駆動装置において、駆動信号を生成する駆動信号生成部と、駆動信号生成部で生成される前記駆動信号を制御する駆動信号制御部と、圧電素子に流れる電流を時間積算した電流積算値に基づいて、圧電素子の変位量を算出する変位量算出部と、を有し、駆動信号制御部は、変位量算出部で算出された変位量に基づいて、駆動信号を制御する。
(もっと読む)
駆動装置
【課題】摩擦係合部材の振動部材に対する固着を解消できる駆動装置を提供する。
【解決手段】電圧が印加されると伸縮する電気機械変換素子5と、電気機械変換素子5の伸縮によって軸方向に変位する円柱状の振動部材6と、振動部材6に滑り変位可能に摩擦係合する摩擦係合部材7とを有する駆動装置1に、振動部材6を軸周りに回転させる回転駆動部材4と、振動部材6と平行に延伸し、摩擦係合部材7と摺動可能に係合し、摩擦係合部材7の振動部材6の軸周りの回転を規制する案内軸8とを設ける。
(もっと読む)
超音波モータ
【課題】 温度センサを設けることなく且つ駆動を妨げることなく超音波モータの温度変化をリアルタイムに検出することができる超音波モータを提供すること。
【解決手段】 超音波振動子4に、所定の位相差及び所定の駆動周波数の2相の交番電圧である駆動信号を印加することで楕円振動を発生させ、該楕円振動から駆動力を得て被駆動体5を摩擦駆動する超音波モータ2を、次のように構成する。すなわち、前記超音波モータ2に、前記駆動信号を生成する信号生成回路25と、前記超音波振動子4の振動状態を検出して振動検出信号を生成する外部電極11と、前記信号生成回路25により生成された駆動信号と、前記外部電極11により生成された振動検出信号と、の位相差を検出する位相差検出回路28と、前記位相差検出回路28により検出された位相差に基づいて、前記超音波モータの温度を算出する温度算出手段22と、を具備させる。
(もっと読む)
161 - 180 / 616
[ Back to top ]