
Fターム[5H680BB16]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 種類、型式 (3,145) | 円板型 (150)
Fターム[5H680BB16]に分類される特許
21 - 40 / 150
振動波モータ
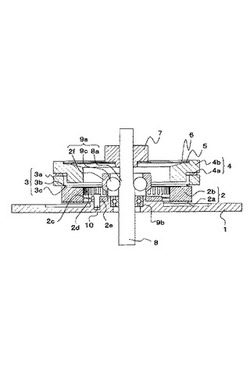
【課題】出力性能や軸受寿命の向上を図るため、定格荷重の大きい軸受を用いても、大型化することを抑制することが可能となる振動波モータを提供する。
【解決手段】電気−機械エネルギー変換素子と、
電気−機械エネルギー変換素子に固定され、電気−機械エネルギー変換素子への電圧の印加により振動する振動体と、
振動体と加圧接触し、振動により摩擦駆動する移動体と、
振動体と移動体とを加圧接触させると共に、移動体の駆動力を出力軸に伝達させるために設けられた加圧部材と、
を有し、これらが円環状に形成された振動波モータであって、
出力軸は、出力軸を回転自在に支持する転がり軸受部材を備え、
転がり軸受部材の一方の軌道輪は、
円環状に形成された振動体に、振動減衰部を介して設けられ、
振動減衰部および軌道輪は、振動体の移動体が設けられている側に設けられている。
(もっと読む)
超音波モータ

【課題】超音波モータに余計な負荷をかけることなく、ステータとロータの固着を解除可能な超音波モータを得る。
【解決手段】コサイン波から成る交流電圧が印加される第5のB圧電体321b、第1のA圧電体311a、及び第2のA圧電体312a、第3のA圧電体315a及び第4のA圧電体316a、第9のA圧電体331a及び第7のA圧電体327a、並びに第7のB圧電体325b及び第6のA圧電体324aが、回転軸X正方向に各々変位する。マイナスコサイン波から成る交流電圧が印加される第1のB圧電体313b及び第2のB圧電体314b、第3のB圧電体317b及び第4のB圧電体318b、第7のA圧電体327a及び第8のB圧電体326b、並びに第5のA圧電体323a及び第6のB圧電体322bが、回転軸X負方向に各々変位する。これにより振動部材19の上に波長λの定在波が発生する。定在波の振幅は、進行波の振幅の2倍である。
(もっと読む)
磁歪型超音波モータ
【課題】本発明は、渦電流損をより低減することができ、より効率の良い磁歪型超音波モータを提供する。
【解決手段】本発明の磁歪型超音波モータSMは、複数の励磁コイル3を備える固定子1と、固定子1に摩擦接触する可動子2とを備え、複数の励磁コイル3のそれぞれは、帯状の導体部材を、該導体部材の幅方向が該励磁コイルの軸方向に沿うように巻回することによって構成され、磁歪により固定子1に進行波を生じさせるものである。
(もっと読む)
超音波モータ
【課題】圧電素子の屈曲振動を積極的に使用することによりねじれ共振振動を効率よく発生させることのできる超音波モータを提供する。
【解決手段】中心軸に垂直な断面が矩形状の長さ比率を有する振動子と、振動子の楕円振動発生面に接して振動子の楕円振動発生面と直交する中心軸を回転軸として回転駆動されるロータと、を少なくとも備え、振動子の回転軸方向に伸縮する縦1次共振振動と、回転軸をねじれ軸とするねじれ2次共振振動又はねじれ3次共振振動とを合成することにより、楕円振動を形成してなり、振動子の回転軸方向に伸縮する縦1次共振振動と、回転軸をねじれ軸とするねじれ2次共振振動又はねじれ3次共振振動と、の共振周波数がほぼ一致するように、振動子の矩形状の長さ比率を設定し、振動子には、厚みすべり振動し、かつ、ねじれ2次共振振動又はねじれ3次共振振動の腹位置に配置されたねじれ圧電体が含まれる。
(もっと読む)
振動波モータ
【課題】温度上昇による性能劣化を抑制することができ、小型化、大出力化を図ることが可能となる振動波モータを提供する。
【解決手段】振動体と電気−機械エネルギ変換素子とを有する振動子を備え、前記振動子の楕円運動によって前記振動体に形成された接触部と接触する移動体を駆動する振動波モータであって、
前記振動波モータで発生した熱を外部に放熱するための可撓性を有する熱伝導部材を備え、
前記熱伝導部材は、前記振動波モータで発生した熱を、前記振動子を支持する振動子支持部材を介して熱伝導する熱伝導経路または前記移動体を介して熱伝導する熱伝導経路、と並列に配設されている。
(もっと読む)
振動アクチュエータ
【課題】小型であり、異音発生の少ない振動アクチュエータを提供する。
【解決手段】駆動信号により励振され、駆動面に振動波を生じる振動体1と、貫通孔部を有し、前記駆動面に加圧接触され、前記振動波により前記貫通孔部を中心として回転駆動される相対運動部材5と、前記振動体と前記相対運動部材とを加圧接触させる加圧部9と、前記貫通孔部の少なくとも一部と嵌合し、前記相対運動部材とともに回転運動することにより、前記相対運動部材の回転運動を取り出す出力取り出し部材14と、前記出力取り出し部材に嵌合し、前記出力取り出し部材の回転中心線方向に移動可能であり、前記出力取り出し部材とともに回転運動するフランジリング部11と、を備えた振動アクチュエータにおいて、前記出力取り出し部材と前記相対運動部材とは、前記出力取り出し部材の回転中心線と前記相対運動部材の回転中心線とが所定の範囲内の角度で、相対的に揺動しながら回転可能なように自由度を有して設けられている。
(もっと読む)
超音波モータ
【課題】圧電素子の屈曲振動を積極的に使用することによりねじれ共振振動を効率よく発生させることのできる超音波モータを提供する。
【解決手段】振動子の回転軸方向に伸縮する縦1次共振振動と、回転軸をねじれ軸とするねじれ2次共振振動又はねじれ3次共振振動とを合成することにより、楕円振動を形成してなり、振動子の回転軸方向に伸縮する縦1次共振振動と、回転軸をねじれ軸とするねじれ2次共振振動又はねじれ3次共振振動と、の共振周波数がほぼ一致するように、振動子の矩形状の長さ比率を設定し、振動子は、中心軸に垂直な面内において複数の領域を有し、複数の領域は、中心軸に沿った方向における変位が隣り合う領域で互いに異なり、振動子は、その分極方向に沿った方向に伸縮する。
(もっと読む)
リニア駆動装置
【課題】同じ種類のリニア駆動装置における振動量のばらつきを防止し且つ安定な振動量を得ることができると共に、振動量の増大を図ることができるリニア駆動装置を提供する。
【解決手段】振動部材17と、振動部材17に基端26を固定した駆動軸21とを備え、振動部材17の振動により駆動軸21がその軸線方向に振動することにより、駆動軸21に摩擦係合した移動体が駆動軸21の軸線方向に沿って摺動するリニア駆動装置において、振動部材17は、通電により伸縮する圧電素子23と、弾性を有する板状の振動子19とを有し、振動子19は圧電素子23の一側面に板面を重ねて固定してあり、振動部材17には駆動軸21が固定してある側と反対側の面に錘部材32が固定してある。
(もっと読む)
アクチュエータ
本発明は、プレート型のアクチュエータに関し、アクチュエータにおいて定常音波を励起させるための少なくとも2つの発生器を備える。アクチュエータは、少なくとも2つの主面と主面に対して垂直に延在する対称面Sとを含む。発生器は、対称面Sに対して対称に配置され、アクチュエータの実質的に平坦な第一の側面領域に配置される。アクチュエータはさらに、被駆動要素に対して摩擦接触するように設けられた少なくとも一つの摩擦要素および/または少なくとも一つの摩擦層を有する。第一の側面領域は、アクチュエータにおいて励起された定常音波の波長に実質的に対応する長さLを有する。本発明によれば、アクチュエータの第二の側面領域の長さBは、アクチュエータにおいて励起された定常音波の波長より大きく、励起された定常音波の波長の半分の倍数に等しくない。  (もっと読む)
(もっと読む)
振動型アクチュエータ
【課題】電極層の種類を減らす。
【解決手段】超音波アクチュエータ2は、圧電体層41,41,…とプラス及びマイナス電極層5,6とを交互に積層させて構成されたアクチュエータ本体4を備えている。プラス電極層5は、第1〜第4プラス分割電極51A〜54Bと、第1及び第3プラス分割電極51A,53Aを接続するプラス対角接続電極55Aとを有する。第2及び第4プラス分割電極52B,54Bは、プラス電極層5の外部で接続されている。マイナス電極層6は、第1〜第4マイナス分割電極61A〜64Bと、第1及び第3マイナス分割電極61A,63Aを接続するマイナス対角接続電極65Aとを有する。第2及び第4マイナス分割電極62B,64Bは、マイナス電極層6の外部で接続されている。
(もっと読む)
超音波モータ
【課題】グリスを用いない軸受け部材で超音波モータの回転軸を軸支する。
【解決手段】超音波モータ10は、回転軸14と、円周方向に沿って並べられた複数の櫛歯17を有する摩擦駆動体12と、摩擦駆動体12によって、回転軸14とともに回転させられるロータ15とを備える。回転軸14の外周面には、回転軸14に摩擦係合して回転軸14とともに回転する回転部材32が係合される。回転部材32の上面32Uには、軸受け部材31が重ねられる。軸受け部材31の下面31D、及び回転部材32の上面32Uは、固体潤滑剤によって被覆される。軸受け部材31は、下面31Dを軸受け表面として、回転部材32を介して回転軸14を軸支する。
(もっと読む)
超音波モータ及び超音波モータ制御方法
【課題】超音波モータに余計な負荷をかけることなく、ステータとロータの固着を解除可能な超音波モータを得る。
【解決手段】交流電源42がV0cos(ωt)による交流電圧であるとき、スイッチ25により交流電源42が第2の印加電極に直接接続されると、第2の振動部材320にV0cos(ωt)による交流電圧が印加される。このとき、圧電体19のA領域における振幅AaとB領域における振幅Abを加えて得られる振幅Atは以下の式になる。At=(√2)A0sin(2πx/λ+π/4)cos(ωt)この式は、振幅が(√2)A0である定在波を示す。そのため、スイッチ25により交流電源42が第2の印加電極24に直接接続されると、スイッチ25により交流電源42が移相器41に接続された場合と比較して、(√2)倍の振幅で圧電体19が振動することがわかる。
(もっと読む)
振動型アクチュエータ
【課題】振動型アクチュエータ作動時の騒音を抑制する。
【解決手段】超音波アクチュエータ2は、アクチュエータ本体4と、アクチュエータ本体4に設けられて駆動力を出力する駆動子3とを備えている。超音波アクチュエータ2は、アクチュエータ本体4に設けられて主面40a,40bに交差する方向の両側へ突出するホルダ5と、ホルダ5をそれぞれ支持する2つの支持体6,6と、アクチュエータ本体4の主面40a,40bに接触することによってアクチュエータ本体4の変位を制限する接触ゴム66a,66b,66cとをさらに備えている。アクチュエータ本体4は、移動体11側へ付勢されている。支持体6,6には、ホルダ5が嵌ると共にアクチュエータ本体4の付勢方向に延びる長孔64が形成されている。接触ゴム66a,66b,66cは、アクチュエータ本体4の各主面40a,40bにおいて長手方向の異なる位置に少なくとも2つ設けられている。
(もっと読む)
超音波モータ
【課題】セルフセンシング方式の超音波モータにおいて低コスト化および小型化を図る。
【解決手段】駆動信号に応答して圧電素子が高周波振動を行う振動体12に移動体13が加圧接触して回転し、それらの接触部に溝等の振動状態を変化させる部分を周期的に形成し、その部分の通過による振動状態の変化を検出回路31が検出することでセンサレスを実現する超音波モータ1において、信号変換器32が検出電極の検出電圧の駆動信号に対する位相の変化から前記部分の通過に伴う脈動波形を生成し、その脈動波形から帯域フィルタ33が脈動成分を抽出し、カウンタ35がカウントすることで、回転位置と回転速度との少なくとも一方の検出を可能にする。そして、帯域フィルタ33の遮断周波数を、周波数設定器36が駆動信号の周波数に応じて変化することで、加圧力のムラにより脈動成分に1回転毎に周期的に現れる交流成分を除去する。こうして、組立て精度を緩和する。
(もっと読む)
振動アクチュエータ、レンズユニットおよび撮像装置
【課題】振動アクチュエータの効率を向上させる。
【解決手段】ロータと、ロータの回転軸の方向に、ロータに接して配されたステータと、回転軸の方向についてロータとの間でステータを挟む位置に配され、ステータに対してロータの回転軸周りに遷移する振動を付与する電気機械変換部と、回転軸の方向についてステータとの間で電気機械変換部を挟む位置に配された狭持部材と、ロータ、ステータおよび電気機械変換部に挿通され、狭持部材に結合された軸部材と、回転軸の径方向について軸部材とステータとの間に挟まれており、回転軸の方向に沿ってロータ側に延伸する振動体とを備える。
(もっと読む)
振動アクチュエータ、レンズ鏡筒及びカメラ
【課題】限定されたスペースにも配置可能で且つ駆動性能の良好な振動アクチュエータ、それを備えるレンズ鏡筒及びカメラを提供する。
【解決手段】本発明の振動アクチュエータ10は、電気機械変換素子13に接触して設けられ、前記電気機械変換素子13の駆動により振動波を生じる弾性体12と、前記弾性体12と加圧接触し、前記振動波によって前記弾性体12に対して相対移動される相対移動部材15と、を備える振動アクチュエータ10であって、前記弾性体12の前記相対移動部材15側は、櫛歯状となるように複数の溝30が形成され、前記相対移動部材15の相対移動方向θと交差する方向における前記溝30の深さは、前記相対移動部材15の相対移動方向θに沿って異なっていること、を特徴とする。
(もっと読む)
超音波アクチュエータ
【課題】駆動開始時および駆動中においても、高効率の駆動が可能である超音波アクチュエータを提供する。
【解決手段】超音波アクチュエータ100は、振動体2と、圧電振動子2bの振動により駆動される移動体1と、駆動信号を生成する駆動信号生成部11と、圧電振動子2bの振動状態にもとづいて、駆動信号生成部11を制御する駆動信号制御部10とを備え、起動時において、圧電振動子が振動し、かつ移動体が駆動されない状態において、駆動信号制御部10が最適駆動周波数を検出し、駆動信号制御部10は最適駆動周波数を検出後、最適駆動周波数を有し、移動体1が駆動されるような駆動信号を生成するよう駆動信号生成部11を制御する。
(もっと読む)
振動波モータの駆動方法及び駆動装置
【課題】振動波モータの実際の回転速度と目標回転速度の回転速度差に応じて、振動波モータに供給する交流電圧の周波数を適切に制御する振動波モータの駆動方法を提供する。
【解決手段】交流電圧により振動体401に振動を発生させて移動体403を駆動する振動波モータ101を、移動体403の目標回転速度Nobjnを設定し、交流電圧の周波数更新量Δfnに対する移動体403の回転速度の増減量ΔNnの割合Tnを求め、目標回転速度Nobjnと移動体403の実際の回転速度Nnとの回転速度差Nobjn−Nnを求め、回転速度差Nobjn−Nnを割合Tnで除することにより周波数更新量Δfnを求め、周波数更新量Δfnを用いて交流電圧の周波数fnを更新する処理を行うことにより、駆動制御する。
(もっと読む)
超音波モータ
【課題】 板状圧電素子と弾性体とを容易に位置決めできる超音波モータを提供すること。
【解決手段】 超音波モータ1は、平面124aと斜面124bと貫通口124cとを有する中空の柱形状の中部基本弾性体124と、貫通口19aを有し斜面124bに傾斜した状態で積み重なる積層型圧電素子18と、平面126aと斜面126bと貫通口126cとを有し、斜面126bにて積層型圧電素子18に積み重なり、斜面124bと斜面126bとの間で積層型圧電素子18を挟み込む中空の柱形状の上部基本弾性体126と、平面126aの上方に配設される摩擦子26と、摩擦子26によって駆動されるロータ53と、ロータ53を摩擦子26に押圧する押圧機構70と、上部基本弾性体126と積層型圧電素子18と中部基本弾性体124とに配設され、それぞれの積層方向に対する周方向における積層型圧電素子18の位置決めを行う位置決め機構140と、を具備する。
(もっと読む)
超音波モータ
【課題】 積層型圧電素子に均等且つ簡易に予圧できる超音波モータを提供すること。
【解決手段】 棒状弾性体12と、棒状弾性体12に両端を保持され、変位方向と棒状弾性体12の長手方向との間の角度において鋭角を有した状態で正面12aと裏面12bとに配設され、さらに棒状弾性体12の長手方向において正対して見て互いに反対方向に傾斜して棒状弾性体12に配置される一対の積層型圧電素子18と、棒状弾性体12の先端部に接合されている摩擦子26と、を具備し、一対の積層型圧電素子18にそれぞれ位相の異なる交番電圧を印加することにより、縦振動と捻れ振動とを同時に励起し、摩擦子26に超音波楕円運動を励起させる超音波モータ1であって、超音波モータ1は、積層型圧電素子18を棒状弾性体12に密着固定するために、積層型圧電素子18を積層型圧電素子18の積層方向に沿って同時に且つ均等に予圧する予圧機構80を具備する。
(もっと読む)
21 - 40 / 150
[ Back to top ]