
Fターム[5J070AC12]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 角度 (1,354) | 仰角又は俯角 (115)
Fターム[5J070AC12]に分類される特許
81 - 100 / 115
レーダ装置
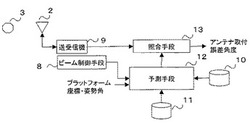
【課題】方位方向に加えて仰角方向の角度誤差を測定でき、プラットフォームが移動していても角度誤差を測定できるレーダ装置を得る。
【解決手段】移動するプラットフォーム1に搭載され、基準目標3に対し電磁波ビームを放射し基準目標からの散乱波を観測する送受信アンテナ2、放射ビームを制御するビーム制御手段8、送受信アンテナに送信信号を送信すると共に、送受信アンテナにより受信される基準目標の信号強度の観測値を得る送受信機9、アンテナ利得の角度特性を記憶した第1のデータベース10、基準目標の座標と電気的特性を記憶した第2のデータベース11、ビーム制御手段による制御値、第1及び第2のデータベースの記憶値、プラットフォームの座標及び姿勢角に基づき基準目標からの信号電力を予測する予測手段12、信号強度の観測値と予予測値との照合に基づき送受信アンテナの取付誤差角度を推定する照合手段13を備える。
(もっと読む)
精測進入レーダ装置

【課題】一次反射鏡の駆動機構を不要として航空機の検出を実現し得る精測進入レーダ装置を提供する。
【解決手段】方位空中線装置13において、一次反射鏡132は垂直面ビーム幅がEL(エレベーション)範囲と同じ角度幅となるビーム特性を有し、高低空中線装置14において、一次反射鏡142は水平面ビーム幅がAZ(アジマス)範囲と同じ角度となるビーム特性を有することで、航空機が両空中線装置13,14のビームが重なった範囲に入るように調整している。
(もっと読む)
レーダ情報処理装置
【課題】個別レーダは極力小型軽量の装置規模を維持しながら、目標の航跡位置情報の信頼性向上を可能にする。
【解決手段】各レーダと目標との相対距離に応じてS/Nウェイト係数を算出するS/Nウェイト計算部と、各レーダと目標との相対位置に応じて位置ウェイト係数を計算する位置ウェイト計算部と、当該装置の自己位置を標定する自己位置標定部と、スキャンごとに各レーダから受信した目標の位置情報のそれぞれに対して、算出されたS/Nウェイト係数および位置ウェイト係数を乗じ、ウェイト付けされた位置情報を合成し、合成された位置情報を当該装置の自己位置に基づいて絶対的な目標位置に変換する位置計算部を備え、位置計算部で算出された前後のスキャン時の絶対的な目標位置に基づいて追尾処理を行う。
(もっと読む)
レーダ装置
【課題】装置の大型化を抑制しつつ水平方向及び仰角方向のいずれの方位角度も検出可能なレーダ装置を提供する。
【解決手段】受信アンテナ部は、仰角方向に沿って等間隔で1列に配置されたM個のアンテナ素子からなるアンテナ列を、仰角方向と直交する水平方向に沿って等間隔にN個配置することで、2次元マトリクス状に配置されたM×N個のアンテナ素子からなる。これらアンテナ列をグループ化することで形成される第1及び第2単位アンテナは、互いに重なり合う同じ大きさのアンテナ開口を有し、そのアンテナ開口は、仰角方向の位置が同じ、且つ水平方向の位置が異なるように設定されている。各アンテナ列の給電線路には、出力端子TLoから各アンテナ素子AEに至る給電線路の経路長がΔRずつ異なるように位相調整部30a〜30hを挿入することで、仰角方向の指向性が調整されている。
(もっと読む)
レーダ装置
【課題】装置の大型化を抑制しつつ水平方向及び仰角方向のいずれの方位角度も検出可能なレーダ装置を提供する。
【解決手段】受信アンテナ部14は、仰角方向に沿って等間隔で1列に配置されたM個のアンテナ素子AEからなるアンテナ列ALを、水平方向に沿って等間隔にN個配置することで、2次元マトリクス状に配置されたM×N個のアンテナ素子AEからなる。各アンテナ列ALは、水平方向の配列順に従って番号が付与され、第1単位アンテナAF1を構成する奇数番目のアンテナ列ALodd (AL1,3,5,…)は、第2単位アンテナAF2を構成する偶数番目のアンテナ列ALeven(AL2,4,6,…)よりアンテナ素子AE一つ分だけ仰角方向の下方に突出し、逆に、アンテナ列ALevenは、アンテナ列ALodd よりアンテナ素子AE一つ分だけ仰角方向の上方に突出するように配置されている。
(もっと読む)
フェイズドアレイレーダの移送量補正装置及び移送量補正システム
【課題】フェイズドアレイレーダが有する移相器の個体差により生ずる移相器からの出力の理論出力からのずれを、正面方向以外にビームを向ける場合にも適正に補正することができる移送量補正装置及び移送量補正システムを提供することを目的とする。
【解決手段】移相器毎に移相器の入力値である設定移相と設定移相に対応する実際の移相器からの出力である実出力移相を格納した移相量テーブルを設け、設定移相の理想的な出力移相である理論出力移相に最も近い実出力移相に対応する設定移相を移相量テーブルから検索して出力する。移相量テーブルは移相器毎に設けてもよい。
(もっと読む)
三次元レーダー像のレンダリングのための装置及び方法
【課題】改善された解像度を有する画像、及びレーダーの位置からだけではなくパイロットの視点からの画像も提供するための改善したレーダーシステム及び方法を提供する。
【解決手段】本発明に従ったレーダー走査地形表面の3D描画画像は地形表面からのレーダーエコー信号によって与えられる。エコー信号は地形表面のレーダー照射領域の方位、高度、及び距離を示すデータを含む。データはX,Y,Z座標への変換のために処理される。各照射領域に対応するX及びY座標は地形表面を表す三角形であって、各々が頂点の3つの組によって規定される三角形のメッシュを生成するために三角測量によって測量される。3D描画画像を形成するために、3D画像情報(グレースケール陰影及び(または)カラーリング情報)が3つの組の各頂点によって表される座標からのレーダーエコー信号の振幅及び各頂点のZ座標の値に基づいて、メッシュの各三角形に加えられる。
(もっと読む)
パッシブコヒーレント探索アプリケーションのための、狭帯域事前検出信号を処理するシステムおよび方法
【課題】パッシブコヒーレント探索アプリケーション(PCL)において、狭帯域事前検出信号を処理するシステムおよび方法を提供する。
【解決手段】受信サブシステムは、基準信号およびターゲット信号を統制されていない送信機から受け取る。PCLシステムは、ゼロ−ドップラー消去、直交復調、基準ビーム再生、コヒーレント処理区間選択、パワースペクトル密度推定、クロスアンビギュイティ関数形成などを含み、基準信号はターゲット信号に関してフィルタリングされて、第1出力基準信号が形成される。第1出力基準信号は第1ターゲット信号と結合されて、第1出力ターゲット信号が形成される。次に、出力ターゲット信号は、後続のPCL探索処理オペレーションに用いられる。フィルタは、ターゲット信号と後続のターゲット信号の差に関して更新される。さらに、基準信号およびターゲット信号の相関処理のために2つの経路が用いられる。
(もっと読む)
方位検出方法、物体検出装置、プログラム
【課題】装置構成を大型化することなく、虚像による方位の誤検出を防止可能な方位検出方法、物体検出装置、及びプログラムを提供する。
【解決手段】正方形の頂点に位置するように配置された受信素子Ei(i=1〜4)からの受信信号を直交復調した復調信号Riに基づき、第1方位候補群生成部25では、同一辺素子対EP12,EP13での位相差から複数の第1方位候補を生成し、第2方位候補群生成部26では、対角線素子対EP14,EP23での位相差から、複数の第2方位候補を生成する。そして、方位決定部27では、これら両方位候補群の間で、示す方位が一致する方位候補対に基づいて、目標物体が存在する水平及び垂直方位を決定する。
(もっと読む)
目標位置確認システム及びレーダ信号処理装置
【課題】レーダ設置場所から見た移動目標の方位・距離のずれ調整作業を迅速かつ適切に行えるようにし、これにより作業の精度向上と作業時間短縮を図ることを可能とする目標位置確認システムを提供する。
【解決手段】滑走路RWY周辺に既知のGPS装置200を設置するだけでよく、またGPS装置200にPAR100への計測位置情報の送信機能を持たせることで、PAR100において自装置の経度緯度情報とGPS装置200の計測位置情報とを利用して、PAR100から見た航空機の方位・距離のずれを容易に調整できるようにしている。
(もっと読む)
パルスレーダ装置
【課題】受信マルチビームにより受信した目標の高度情報を視認性良く表示器上に表示する。
【解決手段】パルスレーダ装置において、仰角方向に受信マルチビームを形成し、角度を異にして、1目標に対する複数個のレーダ反射信号を同時に受信可能なレーダ送受信機1と、このレーダ送受信機1を介して受信された1目標に関する複数個のレーダ反射信号に基づく近似計算(近似計算回路2)を行い、離散的に得られる目標位置データにフィットした上記1目標に対する受信映像表示パターンを生成して、Eスコープ表示器32上に表示する。
近似計算回路2における最小二乗法等の近似計算によれば、濃淡で視認性が良好な目標の高度位置情報を指示器上に表示することができ、目標の高さ位置を精度良く把握できる。
(もっと読む)
精測進入レーダ装置
【課題】簡単な構成で、精測進入レーダ装置における送受信器の故障を検出する。
【解決手段】本発明の精測進入レーダ装置は、第1の切換えスイッチ2と第2の切換えスイッチ5を個別に切換え可能な制御器8Aを備えたので、方位空中線部3で送信したレーダ送信信号の目標(9)反射信号を高低空中線部4で受信したり、反対に高低空中線部4で送信したレーダ送信信号の目標反射信号を方位空中線部3で受信する。
そこで、方位空中線部3の送受信器3a,3dと高低空中線部4の送受信器4a,4dとは、構造及び機能が同等に形成されることから、制御器8Aによる同一目標物(ターゲット)9に対する送受信器3a,3d、4a,4dの組み合わせ構成による受信信号レベルの観測値と、正常であるとされる基準レベル(許容限度)との比較から、簡単な構成で、送受信器3a,3d、4a,4dの異常、あるいは故障の有無を検出できる。
(もっと読む)
標定レーダ装置
【課題】 機動性を損なうことなく全方位を監視し位置標定を行なうことの可能な標定レーダ装置を得る。
【解決手段】 標定レーダ装置の空中線部11を、互いに異なる仰角にペンシルビームを有する2つのアンテナ111及び112で構成するとともに、これら2つのアンテナを、方位方向の指向方位が互いに反対となるように配置する。そして、この空中線部11を駆動部12により方位方向に高速回転駆動することによって、異なる2つの仰角の全周方向に目標を捕捉するためのビーム幕を形成する。
(もっと読む)
レーダ装置
【課題】複数の周波数を用いることなく、マルチパス環境下における受信信号のレベル低下を防止し、目標高度を高精度で測定できるレーダ装置を提供する。
【解決手段】全開口で送信した送信波に対する反射波を受信してΣビームおよびΔビームを生成するアンテナ2と、アンテナからのΣビームおよびΔビームを合成することによりアンテナの開口面を高さ方向に変えた複数のビームを生成するビーム合成器41と、ビーム合成器で生成された複数のビームの中から最大レベルを有するビームを基準ビームとして選択する最大値選択処理器42と、最大値選択処理器から出力される基準ビームに基づき測角を行って目標高度を出力する測角処理器46とを備える。
(もっと読む)
目標航跡相関装置及び目標航跡の相関判定方法
【課題】各センサから得られる複数の目標速度がほぼ同一の場合においても誤相関を軽減できるようにした目標航跡相関装置を提供する。
【解決手段】複数のセンサの各々により得られる目標に関する複数の航跡情報が同一の目標に関する情報であるか否かを判定する目標航跡相関装置において、各センサが求めた目標の追尾速度ベクトルのなす角度を算出する目標追尾速度ベクトル差算出器と、前記センサにより得られる航跡情報の誤差を追尾回数毎及びセンサ毎に予め設定しテーブル化した追尾誤差テーブルと、前記航跡情報の誤差に基づいて、前記目標の追尾速度ベクトルのなす角度の相関しきい値を設定するしきい設定器と、前記目標の追尾速度ベクトルのなす角度と、前記相関しきい値とを比較して、前記複数の航跡情報が同一の目標に関する情報であるか否かを判定する航跡相関判定器とを備えるようにした。
(もっと読む)
アンテナ装置
【課題】フェーズドアレイ方式に比べて安価な反射鏡方式のアンテナで、且つ、データレートを短縮し、形状の大型化を回避できるアンテナ装置を提供する。
【解決手段】機械的な回転駆動機構14上に設置された反射面が湾曲し線状の複数の焦点(線)を有する反射鏡11、12と、前記回転駆動機構14上の前記反射鏡の複数の焦点(線)にそれぞれ設置され、TRM15により仰角方向にビームの電子走査が可能な複数のアレイアンテナでなる一次放射器13と、を備え、互いに異なる方位のマルチビームを形成する。長距離捜索レーダ装置として適用可能である。
(もっと読む)
電子走査式レーダ装置
【課題】アンテナビームの走査を電気的に行って目標物の検出を実現する電子走査式レーダ装置を提供する。
【解決手段】複数のアンテナ素子に対応してそれぞれ位相器、送信部、受信部を設け、送信部からの送信信号を位相器を介して複数のアンテナ素子から送信し、かつ複数のアンテナ素子で受信した信号を位相器を介して受信部で受信する送受信ユニットを備え、この送受信ユニットに対応して一次反射鏡を配置する。そして送受信ユニットのそれぞれの送信部に送信信号源からの信号を分配供給し、それぞれの受信部で受信した信号を合成器で合成し、各位相器の位相量をそれぞれ制御して一次反射鏡からのビームの走査を電気的に行い、合成器で合成処理された信号を受信処理することで目標物の検出を行う。
(もっと読む)
電波レンズアンテナ装置
【課題】バイスタティック方式が採用される電波レンズアンテナ装置において、安価かつ簡単な構成で、ボリュームスキャンを行うことができる電波レンズアンテナ装置を提供することを目的とする。
【解決手段】電波レンズアンテナ装置1は、球形の送信用の電波レンズ2と、球形の受信用の電波レンズ3と、電波レンズ2の焦点部に配置された一次放射器4と、電波レンズ3の焦点部に配置された一次放射器5と、一次放射器4、5を保持するとともに、電波レンズ2、3の中心点を結ぶ軸Aを回動軸として、仰角方向Yに回動可能に設けられたアーム12と、軸Aに垂直な軸Bを回動軸として、方位角方向Xに回動可能に設けられたテーブル8を備えている。そして、一次放射器4、5が、アーム12の回動動作に連動して、軸Aを回動軸として、仰角方向Yに回動するとともに、テーブル8の回動動作に連動して、軸Bを回動軸として、方位角方向Xに回動する。
(もっと読む)
アンテナ装置
【課題】 アンテナ装置が受ける風により変形して生じるアンテナ指向誤差を推定し、これを補正して、アンテナ指向方向の設定を高精度化することができるアンテナ装置を得ることを目的とする。
【解決手段】 駆動指令部6からの駆動指令値に追従するようにアンテナを方位軸及び仰角軸まわりに駆動する。基本的には、角度検出器10の出力により角度情報がフィードバックされて、減算器14において駆動指令値との差分が求められ、制御部7において駆動指令値に収束するよう制御される。また、アンテナ装置が受ける風は風向風速算出部11により算出され、算出した風向及び風速から変形量推定部12によりアンテナ指向方向誤差を推定し、加算器13により角度検出器10の出力値に加算し、アンテナ指向方向誤差が除去されるように駆動制御する。
(もっと読む)
防犯センサ
【課題】誤報の発生を極力防止して的確な検知を行うことができる信頼性の高い防犯センサを提供する。
【解決手段】検知エリアに向けてマイクロ波を送信し、この検知エリア内に存在する物体からの前記マイクロ波の反射波を受信して、その物体までの距離に対応する距離情報を出力するとともに、その物体の方向に対応する鉛直角情報を出力するマイクロウエーブセンサ110と、前記距離情報が、前記鉛直角情報と設置されている位置の高さ情報とに応じて定められている所定距離範囲内である場合に、前記検知エリア内に検知対象物体が存在していると判別する検知対象物体存在判別手段120と、この検知対象物体存在判別手段によって検知対象物体が存在していると判別された場合に警告信号を出力するように制御する警告信号出力制御手段130とを備える。
(もっと読む)
81 - 100 / 115
[ Back to top ]