
Fターム[5J070AC12]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 角度 (1,354) | 仰角又は俯角 (115)
Fターム[5J070AC12]に分類される特許
21 - 40 / 115
気象レーダ装置及び気象観測方法
【課題】三次元気象データを時間及び空間的に高解像度で確実に収集可能にすること。
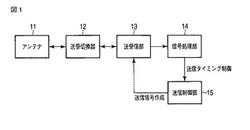
【解決手段】本実施形態に係る気象レーダ装置は、複数のアンテナ素子を鉛直方向に配列したフェーズドアレイ方式のアンテナ11と、パルス送信繰り返し期間(PRI:Pulse Repetition Interval)に、仰角方向の互いに異なる複数の領域に対して複数のビームを放射することによりレーダ電波を送信し、前記ビーム毎の反射波を受信する送受信部13と、前記PRIを前記ビームの全ての反射波の受信期間の終了までの期間とする送信タイミング信号を生成する信号処理部14と、前記送信タイミング信号に従って送信信号を作成する送信制御部15とを具備する。
(もっと読む)
追尾装置

【課題】バイアス誤差推定精度を向上させた追尾装置を得る。
【解決手段】目標Tの動態データを取得する第1のセンサ11と、目標Tの距離、仰角および方位角を取得する第2のセンサ12と、動態データを第2のセンサ12の航跡出力時刻に時刻合わせを行う補正処理部40と、時刻合わせが行われた動態データと第2のセンサ12の航跡とを比較して一致度を出力する一致度判定処理部50と、一致度に基づき、バイアス誤差推定処理部70における予測処理で使用する予測ベクトル算出式を切替える運動モデル設定処理部60と、運動モデル設定処理部60の設定結果に基づき、カルマンフィルタによるバイアス誤差推定処理を行うバイアス誤差推定処理部70と、バイアス誤差ベクトル推定値を蓄積するバイアス誤差データベース80と、バイアス誤差ベクトル推定値を用いてバイアス誤差補正値を算出するバイアス誤差補正処理部90とを備える。
(もっと読む)
フェーズドアレイレーダ装置およびこれを備えた車両
【課題】1台のフェーズドアレイアンテナによって方位角方向だけでなく仰角方向の捜索ないし追尾が可能とされたフェーズドアレイレーダ装置を提供する。
【解決手段】複数の素子アンテナが平面上に並べられて配置され、各素子アンテナから送受信される電波の位相量を変化させて所望方向の目標物を捜索ないし追尾する1台のフェーズドアレイアンテナ本体7と、方位角方向および仰角方向にフェーズドアレイアンテナ本体7の姿勢を制御する姿勢制御手段9とを備えている。姿勢制御手段9は、鉛直軸線V回りに回転する回転台14と、下端が回転台14に対して第1水平軸線H1回りに回動自由に接続されると共に、他端がフェーズドアレイアンテナ本体7に対して第2水平軸線H2回りに回動自由に接続されたリンク16とを備えている。
(もっと読む)
レーダ装置
【課題】 従来のレーダ装置では、方位角、仰角によらず同じ抑圧帯域幅を持つクラッタ抑圧フィルタを使用していたため、特にアンテナビームが正面方向の場合において低速接近目標や横行目標、離隔目標に対する目標検出感度が劣化するという課題があった。
【解決手段】 アンテナビームの方位角および仰角の情報を抽出し、アンテナビーム角度によって変化するクラッタ形状に応じて最適なフィルタ荷重を決定することで、アンテナビームが正面方向の場合においても低速接近目標や横行目標、離隔目標に対する目標検出性能の改善を図ることができる。
(もっと読む)
気象レーダ装置及び気象観測方法
【課題】突発的かつ局地的な気象現象を高精度に観測できるようにする。
【解決手段】気象レーダ装置は、複数のアンテナ素子から電波を送信し、位相制御により仰角方向にビーム走査を行って気象目標からの反射波を受信するアンテナユニット11と、前記アンテナユニット11の開口面の仰角と方位角とを駆動する駆動ユニット12と、複数の観測モードにしたがって前記アンテナユニット11及び前記駆動ユニット12により観測範囲と観測仰角とを調整する空中線調整装置5と、前記反射波の受信信号に基づいて前記観測モードを設定する監視制御装置4とを具備する。
(もっと読む)
誘導装置及び目標検出方法
【課題】目標の方向を常時検出すること。
【解決手段】切換型分配合成器9は、モノパルス測角形態又は到来方向推定形態に応じて、複数のアンテナ素子6−1〜6−Nの配列を複数の領域に分割して、領域毎に受信した反射波の受信電力を合成する。誤差角演算器16は、目標の方位角及び高低角の少なくとのいずれか一方を、モノパルス測角形態で分割された領域の受信電力に基づいて検出する。誤差角演算器17は、到来方向推定形態で分割された複数の領域の受信電力から、目標からの直接反射波と地表反射波を分離し、目標の高低角を検出する。目標との相対距離が所定の距離未満である場合は、モノパルス測角形態による測角と到来方向推定形態による測角が交互に行なわれるよう、測角形態切換器14によって制御される。
(もっと読む)
レーダ装置、該レーダ装置に用いられるビーム走査方法及びビーム走査制御プログラム
【課題】フェーズドアレイ方式のレーダ装置の捜索データレートを向上させる。
【解決手段】ビーム走査制御手段(データ処理部6A、方位ステップ数算出部9A、ビーム制御部8)により、アンテナ素子11が平面状に配列されたアンテナアレイの設定された方位監視範囲2*Δθ(方向監視範囲)内の方位角(方向角)におけるアンテナ利得の変動と送受信ビームbm(方位ビーム)の谷のアンテナ利得の相対変動との和を表す最大利得変動Lが設定され、方位監視範囲2*Δθ内の全ての方位角において最大利得変動Lが一定となるように、送受信ビームbmと隣接送受信ビームbmとの重なり率を表すスタックファクタが可変されて送受信ビームbmの方位に対応する方位情報drが生成され、設定されているビームスケジュール及び方位情報drに基づいて、走査方位制御信号tcが生成されて空中線装置1に与えられる。
(もっと読む)
センサバイアス推定装置
【課題】バイアスベクトル推定値を高精度に算出可能なセンサバイアス推定装置を得る。
【解決手段】それぞれのセンサが、観測値と予測値とに基づいて相関観測値を算出するとともに、相関観測値に基づいてセンサ航跡を算出し、算出結果を出力する装置に適用され、複数のセンサ10、20のバイアスを推定するセンサバイアス推定装置であって、センサ航跡に基づいて、時刻同期および航跡相関を実行し、同一航跡と判定されたセンサ航跡の組を出力する同期処理部30と、同一航跡と判定されたセンサ航跡の組に対してバイアス格子点探索処理を実行し、バイアス推定値を算出するバイアス格子点探索処理部40と、相関観測値に基づいて、バイアス推定フィルタ処理を実行し、バイアスベクトル推定値を算出するバイアス推定フィルタ処理部60とを備え、バイアス推定フィルタ処理部60は、バイアス推定値をバイアスベクトル推定値の初期値として設定するものである。
(もっと読む)
レーダ画像処理装置
【課題】従来のセンサと対象物のアジマス方向およびエレベーション方向の角度、距離からの高度情報による樹木頂点の検出手法、またDSMと、DEMの差から高度情報を得、各画素の高度差を用いた樹冠領域抽出方法は、何れも低SNR下での高度情報誤検出発生時は、樹木の誤抽出を引き起こす可能性が高い。
【解決手段】移動体搭載のレーダにより得られた、観測対象物体までのレーダとの距離と、観測対象物体のレーダに対するアジマス方向角度とエレベーション方向角度を用いて、高度画像作成処理手段が各画素の所定の基準からの高度値を算出して高度画像を生成し、積分範囲設定手段で決定された範囲の高度値を高度積分図作成手段で積分して高度積分図を作成し、この高度積分図を基に物体検出処理手段で観測対象物体の検出を行い、表示手段が観測対象物体が存在する画素または実空間上の位置を表示する。
(もっと読む)
レーダ装置
【課題】周波数ホッピングの実行の有無にかかわらず、DBF方式レーダおよびモノパルス方式レーダへの適用が可能で、かつ低演算量なMLEを用いる測高法を実現したレーダ装置を得る。
【解決手段】アンテナ1からの受信信号から複数チャネルの受信信号を生成する受信機2と、複数チャネルの受信信号からディジタル信号に変換した複数チャネルの受信信号ベクトルを出力するAD変換器3と、受信信号ベクトル、ビーム指向方向情報、目標距離情報、目標高度想定範囲および海面反射係数想定範囲を入力情報として、目標の測高値を算出する目標測高手段4とを備えている。目標測高手段4は、受信信号ベクトルから相関行列を算出する手段と、各種情報からアレーマニフォルドを算出する手段と、相関行列およびアレーマニフォルドから測高値を算出する手段とを含む。
(もっと読む)
車両用レーダセンサ
本発明は、レーダ光線源と、当該光線源の前に配置され、レーダ光線を屈折させる素材から成り、少なくとも一方の側に凸表面(14)を有するレンズ(12)と、を備えた車両用レーダセンサにおいて、凸表面(14)が、方位角(Y1、Y2)よりも仰角(Z1、Z2)においてより強い湾曲を有することを特徴とする、上記レーダセンサに関する。 (もっと読む)
目標追尾装置
【課題】必要最小限のネットワーク通信容量で、各センサにおける送信制御または各センサを管理する管理サーバによる送信要求制御を行うことを可能にし、ネットワーク通信容量の低減を図った目標追尾装置を提供する。
【解決手段】センサ側からセンサ観測情報を集約した再追尾センサ航跡をネットワークに流すことにより、センサ観測情報を全て出力する従来方式に比べネットワークに流すデータ量を低減させる。センサ側において、送信判定処理部1107により、自律的に自センサの再追尾センサ航跡が融合航跡の航跡精度に寄与するか否かによりネットワークに送信するか否かの送信判定を行い、寄与する場合のみ、再追尾センサ航跡を伝送することにより、必要最小限のネットワーク通信容量で、融合航跡の追尾精度を確保する。
(もっと読む)
レーダー装置
【課題】より正確に障害物を検出可能とするレーダー装置を提供する。
【解決手段】電磁波を照射し、物体により反射された当該電磁波の反射波を受信して当該物体を検出するレーダー装置であって、電磁波を照射する照射手段と、電磁波の照射方向を示す照射軸線を上下方向へ揺動する照射方向揺動手段と、所定のタイミングにおいて、揺動手段を動作させて照射軸線の向きを水平方向以外の方向へ向ける照射方向制御手段とを備える、レーダー装置である。
(もっと読む)
レーダ装置
【課題】複数目標の方位角及び仰角を時分割で計測するレーダ装置において、複数目標の方位角及び仰角の対応付けを正しく行うことを目的とする。
【解決手段】複数の反射波受信部で得た反射波信号を合成する信号合成手段5a、5b、複数の反射波受信部で異なる複数の位相中心配置を得るため各反射波受信部から信号を切替て信号合成手段に出力する手段4a,4b、合成信号の位相検波、A/D変換をする手段6a、6b、そのデジタル信号から目標信号を検出する目標検出処理装置7、目標信号から上記位相中心配置のうちの所望位相中心配置での複数目標の角度と位相変化量を求める測角処理装置8、所望位相中心配置での複数目標の角度θiと別の所望位相中心配置での複数目標の角度φiとの対応付けを所望位相中心配置での複数目標の位相変化量γiと別の所望位相中心配置での複数目標の位相変化量ηiで行うペアリング処理装置9を有す。
(もっと読む)
レーダ制御装置、該装置に用いられるレーダ監視覆域設定方法及びレーダ監視覆域設定プログラム
【課題】限定された数のレーダを用いて多数の目標を探知する場合に、目標の出現が予想される地点が効率的に含まれるようにレーダの監視覆域を設定するレーダ制御装置を提供する。
【解決手段】監視覆域候補計算手段20により、目標予想点情報fcに対してレーダR1 ,R2 毎に階層的クラスタリングが行われ、クラスタリング結果のクラスタからレーダR1 ,R2 の監視覆域の組合せの候補caが算出される。監視覆域組合せ計算手段30により、監視覆域の組合せの候補caの中から、一方のレーダで探知され、かつ他方のレーダで探知されない目標予想点が探知される監視覆域から優先的に漸次決定することにより、レーダR1 ,R2 の監視覆域が算出される。最急降下法計算手段40により、監視覆域組合せ計算手段30で算出された全てのレーダの監視覆域に対応するパラメータを初期値として、最急降下法を用いて評価関数の値が最大となる監視覆域のパラメータmaが算出される。
(もっと読む)
ネットワークセンサ装置
【課題】既存レーダシステムへの改修を最小限に抑えて、他センサシステム由来のセンサ情報と既存のレーダシステムの情報とを融合表示可能にする。
【解決手段】他センサシステム300からの時刻毎の当該他センサによる観測情報を、既存レーダシステム200の位置情報に基づいて既存レーダシステム向けの変換済他センサ観測情報に変換する情報変換部101と、センサ部203で観測し、表示部201で表示するようにした形式の自センサ観測情報を受信し、当該観測情報と変換済他センサ観測情報とを照合して自センサ観測情報の時刻列に合わせた時刻同期変換済他センサ観測情報を生成し、自センサ観測情報と時刻同期変換済他センサ観測情報の相関に従って観測対象の割り当てを行って融合センサ情報を算出し表示するために出力する融合部102を備える。
(もっと読む)
レーダ装置
【課題】追尾技術によって生成される航跡の推定精度の向上が効率的に実現されるように、追尾開始性能を最適化するためのレーダの最適な観測間隔を決定することのできるレーダ装置を得る。
【解決手段】レーダ10を制御するレーダ制御部9と、未知の目標を検出する追尾開始手段とを備え、レーダ10から追尾開始手段に対して定期的に観測値を提供するレーダ装置において、観測間隔を、追尾開始手段における実際の追尾開始性能が最適となる値に設定するためのシミュレーション処理手段をさらに備えている。シミュレーション処理手段は、解析用観測間隔設定部2と、追尾開始性能計算部3と、シミュレーション用観測間隔候補設定部4と、擬似観測値生成部5と、擬似航跡生成部6と、追尾開始性能集計部7と、シミュレーションに基づく観測間隔をレーダ制御部9に指示するレーダパラメータ指示部8とを含む。
(もっと読む)
測角装置
【課題】1次元または2次元方向について基準となる不等間隔配置と同様の素子配置を、分割領域ごとに敷き詰めることにより、GLを抑圧するとともに測角処理への影響を打ち消して、有効に測角を行うことのできる測角装置を得る。
【解決手段】複数のアンテナ素子2が不等間隔に配置されたアレーアンテナ1と、受信した各複素信号の和をΣ信号として算出するΣ信号算出手段10、11と、複数のアンテナ素子2の配列を2領域に分割し、分割された各分割領域で受信した複素信号の各和信号の差をΔ信号として算出するΔ信号算出手段10、12と、Σ信号およびΔ信号を用いてアレーアンテナ1における受信到来波の到来角を推定する位相モノパルス測角部13とを備えている。
(もっと読む)
レーダ装置
【課題】高精度で測高を行うことができるレーダ装置を提供する。
【解決手段】ビームを形成してビームデータとして出力するビーム形成部13と、ビーム形成部からのビームデータを積分する検出用積分処理部14と、検出用積分処理部における積分結果に基づき目標を検出する検出処理部15と、ビーム形成部からのビームデータを記憶するビームデータ記憶装置16と、検出処理部で目標の検出に使用されたビームデータを、各々が所定の積分数のビームデータを含む複数の処理単位に分割し、ビームデータ記憶装置から処理単位毎にビームデータを読み出して積分する測高用積分処理部17と、測高用積分処理部における処理単位毎の積分結果に対して処理単位毎に測高演算を行う測高演算部18と、測高演算部における処理単位毎の測高演算によって得られた分割数分の測高値の平均をとって観測された測高値として出力する測高演算制御装置19を備える。
(もっと読む)
レーダ画像処理装置
【課題】移動体に搭載されたレーダで所定領域を観測し、対象物を検出する時、従来は対象物の高度情報と反射強度を用いていたので、高度と反射強度が同程度の建物や車両等は区別できない。
【解決手段】所定領域内の対象物体までの距離と、そのアジマス方向とエレベーション方向の角度のデータを取得データ入力手段で取得し、取得データから3D画像作成処理手段で3次元画像を生成し、3次元画像中の所定領域を領域設定処理手段で抽出し、所定領域の画像データを用いて、高度断面図作成手段で高度断面図を作成し、高度断面図に検出対象物体が存在するかの判定を物体判定処理手段で行い、検出対象物体が存在する位置を表示手段が表示出力する。
(もっと読む)
21 - 40 / 115
[ Back to top ]