
Fターム[5J070AC12]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 角度 (1,354) | 仰角又は俯角 (115)
Fターム[5J070AC12]に分類される特許
61 - 80 / 115
仰角測定能力を持つレーダシステム
自動車の周辺検出用レーダシステムであって、1つ又は複数の送信アンテナにより送信信号を放射する送信手段、物体において反射される送信信号を1つ又は複数の受信アンテナにより受信する受信手段、及び受信した信号を処理する信号処理手段を有するものにおいて、送信アンテナ及び受信アンテナの異なる組合わせから受信信号が取得され、各組合わせに、基準点からそれぞれの送信アンテナ及びそれぞれの受信アンテナの位相中心への両方のベクトルの和として定義される相対位相中心が対応せしめられ、その際使用される送信アンテナ及び受信アンテナが、それぞれ少なくとも近似的に同じ放射特性を持ち、これらの送信アンテナの放射特性がこれらの受信アンテナの放射特性に対して異なっていてもよく、空間方向Rに対して直角な空間方向Sに関して、相対位相中心の位置に関して空間方向Rに規定されている送信アンテナと受信アンテナのこれらの組合わせの列が考察される時、送信アンテナと受信アンテナのこれらの組合わせの相対位相中心の位置が、周期長Pで周期的に変化し、物体の受信信号が、空間方向Sにおけるその角度位置に従って、このように規定される送信アンテナと受信アンテナのこのように規定される組合わせにわたって周期長Pで交番する位相成分を持ち、それによりこの空間方向Sに対して物体の位置を表すことが可能であることが、信号処理手段において利用されることを特徴とする。 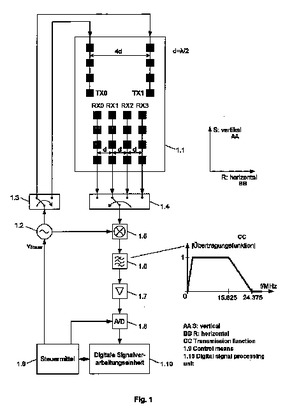 (もっと読む)
(もっと読む)
レーダ装置

【課題】レーダ装置で真上を通過しない目標の推定高度を算出する。
【解決手段】開示されるレーダ装置は、電波ビーム照射と反射波受信を行う空中線101と、空中線の方向を制御する駆動制御器102と、送信信号を発生しディジタル受信信号を出力する送受信器103と、受信信号の相関処理を行うパルスドップラ処理器104と、閾値と比較して目標信号を検出する目標信号検出器105と、電波発射時刻と目標信号検出時刻から目標の距離を計測する距離計測器106と、ビーム送信角度から目標の方位角を計測する方位角計測器107と、パルスドップラ処理結果から目標のドップラ周波数を計測するドップラ計測器108と、ドップラ周波数から目標の視線速度を計測する視線速度算出器109と、目標の距離,方位角,視線速度の計測値を遅延させる遅延器110と、計測結果と所定時間前の距離,方位角,視線速度値から目標の推定高度を算定する推定高度算出器111とを具える。
(もっと読む)
目標物体の検出および追尾を行うシステムおよび方法

【課題】目標物体の高度の計算を含む、目標物体の検出および追尾を行うシステムならびに方法を提供する。
【解決手段】受信機によって受信された信号の処理中に、このシステムは、送信機によってブロードキャストされた信号により形成される干渉効果パターンによって変更された信号から、目標物体の高度を計算するか、または、3以上の送信機に関連付けられた幾何学形状の計算およびそれらの形状の交点を求めることから、目標物体の高度を選択的に計算する。
(もっと読む)
電波探知装置
【課題】コーニングエラーに対して、フェイズドアレイアンテナを回転せずに方位精度を高めることを可能にする。
【解決手段】予め仰角ごとに測定したフェイズドアレイアンテナのコーニングエラーに因る真の方位と推定方位間の方位差を、真方位算出用データベースに格納しておき、アンテナアレイ面を基準方向に向けて設置したフェイズドアレイアンテナとマルチアンテナのそれぞれで受信した到来電波から目標の周波数、パルス幅、パルス繰り返し周波数、パルス到達時刻、推定方位を検出し、両アンテナによる目標の周波数、パルス幅、パルス繰り返し周波数、パルス到達時刻について相関処理を行い、相関が取れた目標の推定仰角を真方位算出用データベースの仰角と照合して対応する方位差を抽出し、抽出した方位差に基づいて該当目標の推定方位を補正して真の方位を算出する。
(もっと読む)
走査型測距測角センサ用データ処理装置
【課題】処理能力の制約や移動体の運動や動揺に関わらず移動体と対象物間の相対距離と相対姿勢を高速,高精度に取得する。
【解決手段】開示される走査型測距測角センサ用データ処理装置は、受信強度信号10と距離計測信号11とAZ角度計測信号12を生成する2軸駆動型測距/測角センサ1と、有効強度信号14と有効距離信号18と有効AZ角度信号19と有効EL角度信号20を生成するデータ切り出し処理器2と、データインデックス信号15を生成する有効データ2値化処理器3と、データ集中度インデックス信号16を生成するデータ集中度判定処理器4と、グループ化データインデックス信号17を生成するデータグルーピング処理器5と、ターゲット距離信号21とターゲットAZ角度信号22とターゲットEL角度信号23とグループデータ個数信号24を生成するターゲット抽出/距離・角度生成器6と、その各信号を格納する測距/測角データ格納メモリ7を備える。
(もっと読む)
物体検出装置
【課題】簡単な構成によって路面かあるいは路面上の物体かを判別する物体検出装置を提供することを課題とする。
【解決手段】路面上に存在する物体を検出する物体検出装置1であって、物体の位置を検出する位置検出手段10,21と、位置検出手段10,21で検出する際の少なくとも鉛直方向の検出角度を設定する検出角度設定手段24と、検出角度設定手段24によって設定された検出角度に変化させた前後で位置検出手段10,21によって所定時間間隔でそれぞれ検出された各位置の変化に基づいて路面か又は路面上の物体かを判定する判定手段25とを備えることを特徴とする。
(もっと読む)
追尾装置及びプログラム及び追尾方法
【課題】複数の異なるセンサ装置が目標を観測した結果に基づいて、目標を追尾する。
【解決手段】トラック記憶部181は、複数のセンサ装置それぞれが観測した目標に関する情報を表わす複数のトラックデータを記憶する。トラック記憶部181が記憶したトラックデータが更新された場合、優先度算出部141は、更新されたトラックデータの優先度を算出する。共通データ更新部144は、優先度算出部141が算出した優先度が高い場合に、更新されたトラックデータを、共通データ記憶部182に共通データとして記憶させる。
(もっと読む)
レーダ統制システム
【課題】 目標物の事前情報とレーダ装置の性能や設置場所を基に、複数のレーダ装置の割当を設定するレーダ制御パラメータの最適値候補を算出するレーダ統制システムを提供すること。
【解決手段】 状況入力手段により入力されたレーダ制御傾向、目標状況、電波環境状況、レーダ配備状況の組合せに応じた複数のレーダ装置の目標に対する割当スケジュールを算出する際に用いる、最適な複数の各制御パラメータを算出する算出手段と、状況入力手段により入力されたレーダ制御傾向、目標状況、電波環境状況、レーダ配備状況と算出手段により得られる複数のレーダ装置のスケジュールを算出する際に用いる各制御パラメータと各制御パラメータを用いた場合の結果評価値とを記憶する記憶手段と、算出手段により算出された各制御パラメータより得られる評価結果を解析し、その評価結果から最適な制御パラメータの組合せを少なくとも一つ算出する解析手段とを備える。
(もっと読む)
センサ情報融合装置
【課題】2D角度観測値を用いた距離推定値初期値と距離変化率推定値初期値の高精度化、2D角度観測値を用いたバッチ処理後の距離推定値と距離変化率推定値の高精度化を可能にする。
【解決手段】センサによる2D角度観測情報に基づいて2D角度航跡を算出する2D角度追尾手段と、2D角度観測情報と2D角度航跡について事前設定された圧縮間隔に基づいて最小2乗統合により圧縮処理して統合2D角度観測情報を算出する2D角度観測情報圧縮手段と、3点の統合2D角度観測情報に基づいて距離推定値初期値および距離変化率推定値初期値を算出する距離推定値初期値算出手段と、上記算出初期値を初期値として、2D角度観測情報を事前に設定したバッチデータ数分蓄積してバッチ処理して距離推定値および距離変化率推定値を算出する距離算出バッチ処理手段を備える。
(もっと読む)
レーダ処理装置および位置特定プログラム
【課題】得られた位置情報の分布に基づいて、測定対象物が存在する位置を推定することにより、測定対象物の位置情報の取得精度を向上させることが可能なレーダ制御装置および位置特定プログラムを提供すること。
【解決手段】反射波から、距離方向、方位方向および高低方向のうち2または3方向のマトリックスを用いてマトリックス状の受信データを順次取得しながら、取得したマトリックス状の受信データに基づいて前記測定対象物の位置を推定し、前記測定対象物の位置情報を出力する。
(もっと読む)
合成開口レーダ装置
【課題】観測対象物の断面像の分解能およびコントラストを高められ、かつ、深い位置の断面像を得ることができる合成開口レーダ装置を提供する。
【解決手段】照射範囲においては、エレベーション方向よりもアジマス方向の方が長いので、同じ送信電力で得られる受信電力が大きくなり、断面像の分解能およびコントラストを高められる。また、パルス信号の最大の到達距離を長くできるので、深い位置の断面像を得ることができる。また、同じ送信電力で得られる受信電力が大きくなるので、同等の断面像を得る際の送信電力を小さくでき、合成開口レーダ装置の省電力化および小型化に貢献することができる。
(もっと読む)
目標追尾装置
【課題】速度推定値の精度が悪い場合でも追尾継続が可能な目標追尾装置を得る。
【解決手段】ドップラ速度変化率が閾値を超えるか否かを判断し、ドップラ速度変化率が閾値を超えない場合には、直進目標用フィルタを選択し、ドップラ速度変化率が閾値を超える場合には、旋回目標用フィルタを選択するとともに、この時点におけるヘディングの値をヘディング基準値に設定し、その後、前記旋回目標用フィルタを選択した場合に、判定保留期間が経過するまで旋回目標用モデルを選択し、判定保留期間中に、現フレームのヘディングと前記ヘディング基準値の差異であるヘディング変化が閾値を超えるか否かを判断し、ヘディング変化が閾値を超える場合には、判定保留期間が経過した以降も旋回目標用モデルを選択し続け、ヘディング変化が閾値を超えない場合には、判定保留期間が経過した以降は直進目標用モデルを選択する追尾処理部20Aを設けた。
(もっと読む)
モードS二次監視レーダ
【課題】オールコール期間およびロールコール期間におけるトランスポンダの捕捉を確実にする。
【解決手段】監視空域を飛行する航空機に質問を送信し、質問に対して航空機から送信された応答に基づいて航空機の監視結果を出力するモードS二次監視レーダ1であって、オールコール期間にオールコール質問を送信し、ロールコール期間にロールコール質問を送信する送信器122と、オールコール質問に対応して航空機から送信されるオールコール応答と、ロールコール質問に対応して航空機から送信されるロールコール応答とを受信する受信器123と、オールコール応答に関する処理をオールコール期間および続くロールコール期間とに分けて実行するとともに、ロールコール応答に関する処理をロールコール期間および続くオールコール期間とに分けて実行する応答処理部132とを備えている。
(もっと読む)
フェーズドアレイアンテナおよびフェーズドアレイレーダ
【課題】装置の増大化、回路の複雑化を回避してデータレートを低減するとともに測角精度の向上を図ることが可能な円筒型フェーズドアレイアンテナを実現する。
【解決手段】円筒型アレイをローアレイ構造とし、受信系ローフィーダを2系統独立に設けてAD変換を行い、仰角方向にDBFマルチビームを形成し、方位方向にはモノパルスビームを成形する。方位走査はモジュールのスイッチを切替えることにより行う。
(もっと読む)
基準値算出方法及び基準値算出装置
【課題】目標の位置を評価する基準値を高精度に算出できる基準値算出方法及び基準値算出装置を提供する。
【解決手段】目標の観測値、観測誤差及び推定値から航跡を評価する基準値を算出する基準値算出方法又は装置であって、過去の目標の複数個の基準値に基づき、スプライン補間法により前記推定値を算出する。
(もっと読む)
3次元高度探知鳥類レーダー用装置および方法
高度探知3次元鳥類レーダーは、アンテナの指向仰角を変更する手段を備える方位角スキャンレーダーを備えている。仰角の変更は、多重ビームを備えたアンテナを用いるか、仰角方向走査手段を用いるか、異なる仰角を指向する2つのレーダーを用いることにより行える。異なる仰角で放射されたビームで探知された鳥などのターゲットからの受信反射波の解析により、ターゲットの高度が特定される。 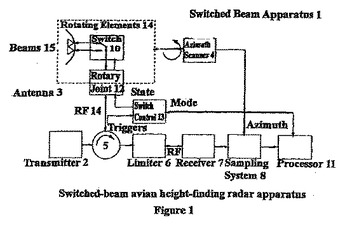 (もっと読む)
(もっと読む)
信号処理装置およびその方法
【課題】ESPRITによる信号処理だけで複数の候補値を算出しこれらから推定値を得ることで推定値の信頼性を高めた信号処理装置および方法を提供する。
【解決手段】所望のパラメータに関し、アレー状の複数の受信素子の各受信素子から得られる受信信号に対してESPRITによる信号処理により、共分散行列を演算し、算出された共分散行列を固定値と固有ベクトルに展開し、固有ベクトルに選択行列対を適用して得られた2つの行列の関係を最小二乗法で解き、最小二乗法の解から所望のパラメータの推定値の候補値を算出して出力する信号処理において、複数のサブアレー選択方法によりそれぞれに、固有ベクトルの複数の要素を各選択方法で異なるサブアレーに分割し、複数のサブアレー選択方法毎にそれぞれESPRITによる信号処理で所望のパラメータの推定値の候補値を算出し、算出された複数の候補値を組み合わせて推定値を判定する。
(もっと読む)
多センサ処理
多センサ処理の方法は、第1のセンサシステムにおいて、第2のセンサシステムからトラックデータを受信すること、第1のセンサシステムからのトラックデータを第2のセンサシステムからのトラックデータと比較することであって、或る時間期間の間にトラックが第1のセンサシステムの視野内に存在することになるか否かを判断する、比較すること、第1のセンサシステムにおいて、トラックデータに基づいてトラックの予測品質を求めること、及び、当該トラックの予測品質をブロードキャストすることを含む。本方法は、第2のセンサシステムからトラックの予測品質を受信すること、並びに、第1のセンサシステムによって求められたトラックの予測品質、及び第2のセンサシステムから受信されたトラックの予測品質に基づいて第1のタスクのセットを決定することも含む。 (もっと読む)
軸調整機能付き車載レーダ
【課題】電波放射方向の軸調整を簡単に行うことができる軸調整機能付き車載レーダを提供する。
【解決手段】モータ30により車載レーダ10の仰角方向のアンテナ12の角度を変化させつつ車載レーダから電波を放射し、そのときの距離に対し、車載レーダ10で受信した電波の受信強度を記憶装置40に順次記憶させる。そして、記憶させた各距離における平均電波強度の和を算出し、算出した平均電波強度の和と現在の他車両105との距離における電波強度の和とを比較し、前回の平均電波強度の和の方が大きければ、モータ30によって車載レーダ10のアンテナ12の角度を前回の角度とし、小さければ、今回の角度とするようにアンテナ12の角度を調整する。平均電波強度の和の算出の際には、他車両105までの距離が遠いほど大きな重みを付ける。
(もっと読む)
電波軸調整装置および電波軸調整方法
【課題】レーダ装置の左右方向と上下方向の電波軸調整を、電波反射体を前方所定位置に1箇所配置するのみで、アンテナの個体ばらつきを吸収し、短時間で容易にかつ自動的に調整する電波軸調整装置および電波軸調整方法を得る。
【解決手段】車両2とレーダ装置3との接続部に設けられ、車両2に対するレーダ装置3の取り付け角度を調整する軸調整機構4と、電波反射体6を移動させ、電波反射体6の検出限界位置または検出期間に基づいて、電波軸7と進行方向中心軸8とが一致するように、軸調整機構4に動作指令を出力する軸調整制御部5とを備えている。
(もっと読む)
61 - 80 / 115
[ Back to top ]