
Fターム[5J070AH21]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | 多段階測定(粗・精) (28)
Fターム[5J070AH21]に分類される特許
1 - 20 / 28
代表位置検出装置、表示装置、レーダ装置、代表位置検出方法及び代表位置検出プログラム
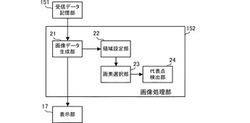
【課題】物標の位置を精度よく検出することができる代表位置検出装置、表示装置、レーダ装置、代表位置検出方法及び代表位置検出プログラムを提供する。
【解決手段】画像データ生成部21が物標で反射したエコー信号に基づいて生成した画像データに対して、領域設定部22は、画像データの各画素の輝度に基づいて、物標を含む検出領域を画像データに設定する。画素選択部23は、設定した検出領域を構成する画素から、輝度が高い順を複数選択し、代表点検出部24は、画素選択部23が選択した画素の位置に基づいて、代表位置を検出する。
(もっと読む)
物体検出装置および物体の検出方法

【課題】レーダ装置の検知範囲に含まれている物体を、その物体の移動速度に関わらず検知する。
【解決手段】実施形態に係る物体検出装置は、送信部、受信部、移動物体検出部、および、微動物体検出部を備える。送信部は、レーダパルスを送信する。受信部は、物体からのレーダパルスの反射波を受信する。移動物体検出部は、受信部が第1の時間の間に受信した受信信号を解析することにより、移動している移動物体を検出する。微動物体検出部は、第1の時間よりも長い第2の時間の間に、受信部が受信した受信信号を解析することにより移動物体に比べて移動量が微小な微動物体を検出する。
(もっと読む)
無線測位装置及び無線測位方法
【課題】複雑な伝搬環境においても、1つの装置によって測位対象の位置を特定することができる無線測位装置及び無線測位方法を提供すること。
【解決手段】距離測定部103は、インパルス信号が送出されてから受信されるまでの往復時間を計測して測位対象までの距離を測定する。相関行列演算部104は、アレイアンテナ102の受信信号から相関行列を演算する。相関行列テーブル記憶部105は、キャリブレーションモード時に取得され、平面上に設定された測定ポイントにおける相関行列を、基準相関行列として、測定ポイントと対応付けて記憶する。積和部107は、通常運用モード時に、測定相関行列と基準相関行列との類似度を算出する。位置判定部111は、類似度が最大の測定ポイントの累積距離dと、距離rとに基づいて、測位対象の位置を判定する。
(もっと読む)
電波受信装置及び到来方向測定方法
【課題】レーダ波の到来方向を、精度良く、短時間で求めることができ、かつ小さなハードウェア規模を実現することが可能な電波受信装置及び到来方向測定方法を提供する。
【解決手段】まず、アンテナ11−2,11−3からの受信波に基づいて、粗測角処理器153で振幅モノパルス方式を利用して、レーダ波の到来方向を測定する。その後、アンテナ11−1,11−4からの受信波に基づいて、精測角処理器154でインターフェロメータ方式を利用すると共に、粗測角の結果を参照して、レーダ波の到来方向を測定する。
(もっと読む)
レーダ装置
【課題】クロスレンジプロフィールを用いた類別判定において、目標の観測条件(距離、速度、進行方向)によってクロスレンジ分解能が変化することにより、類別判定結果の信頼性が大きく変化するという運用上の課題がある。
【解決手段】追尾情報から得られた目標の観測条件と、所望のクロスレンジ分解能から、所望のクロスレンジ分解能を得るために必要となる目標観測時間を算出し、これに基づき捜索ビーム及び類別ビームのビームスケジューリングを行う。
所望のクロスレンジ分解能を得るために更に長い目標観測時間が必要な場合は、類別ビームを分割送信することによりクロスレンジ分解能を向上させ、目標の観測条件によらずクロスレンジ分解能を一定にすることにより、類別判定結果の信頼性を一定に保つ。
(もっと読む)
物体検出装置
【課題】複数の移動物体が近接している場合であっても、各移動物体との正確な距離を検出する。
【解決手段】物体検出ECU1は、粗決定サーチ関数及び精決定サーチ関数に基づいて、移動物体毎に対応する遅延時間を特定できるか否かの判定を行う時間判定部106と、ステレオカメラ23を介して、複数の移動物体を含む画像を取得する画像取得部108と、遅延時間を特定できないと判定された場合に、取得された画像に基づいて、遅延時間を特定できないと判定された移動物体である特定困難物体に対応する粗決定サーチ関数及び精決定サーチ関数を補正する関数補正部112と、補正された粗決定サーチ関数及び精決定サーチ関数に基づいて、特定困難物体に対応する遅延時間を特定する遅延時間特定部113と、特定された遅延時間に基づいて、特定困難物体との距離を求める距離算出部114と、を備える。
(もっと読む)
レーダ装置
【課題】車両の遠方にいる歩行者等の物体、および、車両に近接した歩行者等物体の双方を高感度で検出できるレーダ装置を提供すること。
【解決手段】レーダ装置は、仰角面内において水平方向への指向性を有する指向性ビームを放射する水平用送受信アンテナと、水平より上方である所定の方向への指向性を有する指向性ビームとを放射する高仰角用送受信アンテナとを備える。また、レーダ装置は、指向性ビームを放射するアンテナを水平用送受信アンテナおよび高仰角用送受信アンテナのいずれか一方に切り替えるための切替手段を備える。
(もっと読む)
レーダ装置、及び方位角検出方法
【課題】異なる周期で動作する画像認識装置からの検出位置を用いて、レーダ装置により物標の方位角を精度良く検出する。
【解決手段】レーダ装置に、前記探索領域の撮影画像に基づいて第1の周期ごとに前記物標の位置を検出する画像認識装置から、当該検出された検出位置が入力される入力手段と、複数の前記入力された検出位置に基づいて、前記第1の周期より短い第2の周期ごとに前記物標の方位角を推定する方位角推定手段と、前記探索領域のうち、前記推定された推定方位角付近では第1の方位角刻み、それ以外の範囲では前記第1の方位角刻みより大きい第2の方位角刻みで前記物標の方位角を検出する方位角検出手段とを備えることで、物標の方位角を精度良く検出できる。
(もっと読む)
電波探知装置
【課題】 粗測系の機能を喪失した場合に、精測系により粗測系の作動をさせることで、粗測系の機能の喪失を防ぎレーダ逆探知の機能を向上させることを目的としたものである。
【解決手段】 広覆域で瞬時受信帯域幅の広い粗測機能を有する処理系と、狭覆域で瞬時受信帯域幅は狭いが高感度、高方探精度、高分析精度で探知できる精測機能を有する2つの処理系で構成される装置において、粗測系の各構成(アンテナ部、受信部、パルス分析/目標検出部、各構成間のケーブルなど)が故障した場合、その故障を検出できる故障検出部を備え、故障を検出した場合に精測系の受信制御を変更できる機能を有する受信スケジュール制御部を備える。
(もっと読む)
距離測定装置及び距離測定方法
【課題】高い分解能を有し、正確な測定を実施できる距離測定装置を提供する。
【解決手段】距離測定装置は、時間遅延回路を利用した粗距離測定回路18と、搬送波のベクトルの向きを測定して距離を計測する精密距離測定回路31とを有し、これらの和が最終出力となる。粗距離測定装置18は、測定スパンが長いが精度が低い。精密距離測定装置18は、測定スパンが短いが精度が高い。これらの組み合わせにより、測定スパンが長く、高い分解能を有し、正確な測定を実施できる距離測定装置とすることができる。
(もっと読む)
レーダ信号処理装置およびレーダ信号処理方法
【課題】レーダ装置はできるだけ多くの信号を、できるだけ短時間での処理が要求され、信号の要求精度を落とさずに高精度の高分解能処理の削減で負荷を削減する。
【解決手段】目標物からの反射波をアンテナで受信してA/D変換部でディジタル化し、時間フーリエ変換部でドップラー周波数次元に変換して目標物の相対速度を算出し、ドップラー周波数次元の信号に対しピーク検出部で受信レベルのピーク検出を行い距離ゲートまたは相対速度情報から信号の重要度を重要度判定部で判定して、データ並び替え部で重要度順に並び替え、この各信号と重要度を、異なる複数の高分解能処理方法における演算精度および所定数の信号の処理時間を処理方法との組合せ毎に格納されたデータベースと照合し、各信号と高分解能処理方法とをデータ割当て部で対応させ、高分解能処理部で角度または距離を算出する。
(もっと読む)
ターゲット識別装置
【課題】広帯域信号を用いて効率的に複数のターゲットについての識別情報を得る。
【解決手段】得られた受信信号に基づいて算出された粗決定サーチ関数F(Δτ)について、最大値探索部516において相関が最も大きい第1ターゲットを抽出し、その遅延時間τs1を検出する。次に、遅延時間τs1に基づいて、粗レプリカ生成部512において、第1ターゲットしか存在しないと仮定して得られる粗決定サーチ関数である第1ターゲット粗決定サーチ関数レプリカFrep1を生成する。減算部514において、粗決定サーチ関数F(Δτ)から、第1ターゲット粗決定サーチ関数レプリカFrep1を減算する。そして、最大値探索部516において、減算部514で得た減算結果の粗決定サーチ関数Fc1(Δτ)について、その中で相関が最も大きい第2のターゲットを抽出しその遅延時間Δτs2を検出する。
(もっと読む)
レーダ装置
【課題】ブラインド領域をカバーするための短い送信パルスの送受信を不要とすることで、時間的なリソースを節約する。
【解決手段】周波数変調した送信パルスを周期的に送信し、目標物から反射された反射パルスを受信してパルス圧縮し、このパルス圧縮結果をもとに目標物の位置を検出するレーダ装置において、それぞれが異なる受信パルス幅に対応する周波数変調の帯域幅を有する参照関数が用意され、該異なる参照関数を用いて前記パルス圧縮処理を行う複数のブラインド領域用のパルス圧縮器4a〜4eと、複数のパルス圧縮器4a〜4eによるパルス圧縮処理結果を用いて目標物検出処理を行う複数の目標検出器6a〜6eとを備え、ブラインド領域における目標物を検出する。
(もっと読む)
ドップラ速度計及びドップラ効果を用いた速度計測方法
【課題】高い応答性をもってドップラ周波数を検出できると共に、被計測物体Wの移動方向を確実に知ることのできる速度計及び速度計測方法を提供する。
【解決手段】本発明のドップラ速度計1には、第1の周波数を有するように送信波を発生する第1発振部2と、第1の周波数とは異なる第2の周波数を有する比較波を発生する第2発振部5と、受信波と比較波との周波数差に含まれるドップラ周波数を基に、被計測物体Wの移動速度を算出する速度算出部8と、第1の周波数と第2の周波数との周波数差を、ドップラ周波数より大きく且つ第1の周波数及び第2の周波数より小さい一定値に維持するように第2発振部5を制御する周波数差維持部16とが備えられている。
(もっと読む)
レーダ装置
【課題】レーダ装置の覆域を拡充すると装置規模が拡大する問題が発生していた。
【解決手段】空中線から送信信号を放射し目標からの反射波を受信処理して目標検出を行うレーダ装置において、目標検出器8で目標が検出されるまでは、仰角ビーム制御器5と方位ビーム制御器6とレンジビン制御器9を広仰角ビーム、広方位ビーム、粗いレンジビンに制御することで誤警報確率を緩和し、最小探知S/Nを緩和させることによって、尖頭送信電力を抑えレーダ装置規模を縮小する。目標検出器8が目標を検出した際は、仰角ビーム制御器5と方位ビーム制御器6とレンジビン制御器9を狭仰角ビーム、狭方位ビーム、細かいレンジビンに制御して、再度目標検出することにより、分解能を向上して目標に対し精確に位置を特定する
(もっと読む)
レーダ装置
【課題】相関処理の負荷を低減させると共に、速度や距離の測定におけるアンビギュイティを解消する。
【解決手段】符号変調を加えた高パルス繰り返し周波数信号の送信に先立って、符号変調を行なわない高パルス繰り返し周波数信号を送信し、この受信パルスと送信パルスとから対象物の反射波のドップラーシフト量を含む周波数を求めておき、次に送信した符号変調を加えた高パルス繰り返し周波数信号に対する受信パルスにについて相関処理を行い、その際、先に求めた周波数を中心とする限られた帯域についてのみ、反射波に対する時間軸方向の相関係数を算出するようにしたものである。
(もっと読む)
無線受信装置と無線受信方法
【課題】 必要とするダイナミックレンジ総てに最適なADC入力レベルを瞬時に対応させることができるようにする。
【解決手段】 無線受信信号を互いに異なる比率で2系統に分波し(13)、各系統(16〜22,23〜29)でそれぞれ不等分分波された信号を互いに独立して検波してデジタル信号に変換し、各系統の処理結果を選択的に取り込んで復調出力(30,31)するものとし、要求ダイナミックレンジについて比率によって各系統が受け持つ利得範囲を割り当てるようにした。
(もっと読む)
測高レーダ装置
【課題】 マルチパスによる影響等を低減して良好な観測精度を有する測高レーダ装置を得る。
【解決手段】 レーダ送信信号としてメインパルスとこれに続くサブパルスの2つのパルスを用い、メインパルスを広い仰角覆域範囲に、またサブパルスをこの範囲内の、例えばマルチパスを生じやすい所定の仰角範囲に重複させて形成した送信ビームによりそれぞれ放射する。そして、その反射波から、メインパルス及びサブパルスに対応して独立に設けられた受信ビーム形成及び測高処理系により信号処理を行ない、それぞれの系から測高データを得たのちに、これらを平滑化する。
(もっと読む)
個体認識方法及び装置、個体認識範囲調整方法、及びプログラム
【課題】本発明は、個体認識方法及び装置、個体認識範囲調整方法、及びプログラムに関し、安価で簡単な構成で対象物の有無及び移動方向を判断することができ、簡単な処理でこのような判断を行えるようにすることを目的とする。
【解決手段】リード/ライト可能範囲内にあるRFIDタグに対してリード/ライトを行うRFIDリーダ・ライタ装置を用いる個体認識方法において、RFIDタグで認識される移動してくる対象物を範囲センサで検出し、範囲センサの検出範囲をリード/ライト可能範囲より狭く設定すると共にリード/ライト可能範囲と検出範囲を一部重なるように設定し、対象物の個体認識をRFIDリーダ・ライタ装置と範囲センサの検出結果に基づいて行うように構成する。
(もっと読む)
自動車のレーダシステム、およびレーダシステムに対する物体の速度および距離を決定する方法
【課題】 高信頼度の物体識別と高更新率とを備えて、レーダシステムに対する物体の速度および距離を決定する方法、および、その方法を実行するレーダシステムを提供する。
【解決手段】 レーダシステム(12)のカバー領域(EB)が、少なくとも2つの部分領域(TB1、TB2、TB3)に分割され、連続する複数の測定サイクル(MZ1、MZ2;MZi、MZi+1)において、反射物体(14、16)を対象にして調べられ、各測定サイクル(MZ1、MZ2;MZi、MZi+1)において受信されたレーダ信号は、部分領域(TB1、TB2、TB3)にしたがって個別に処理され、処理されたレーダ信号が組み合わされて、空間方向にしたがって区分された全体結果が形成される。第1の測定サイクル(MZ1;MZi)において受信されたレーダ信号から、反射物体(14、16)の距離(r14、r16)および速度(vr14、vr16)の推定値が導出され、この推定値は、少なくとも1つのさらなる測定サイクル(MZ2;MZi+2)において受信されたレーダ信号に応じて有効化または無効化される。
(もっと読む)
1 - 20 / 28
[ Back to top ]