
Fターム[5J070AK25]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | レーダ搭載体の動揺対策 (19)
Fターム[5J070AK25]に分類される特許
1 - 19 / 19
レーダ画像処理装置
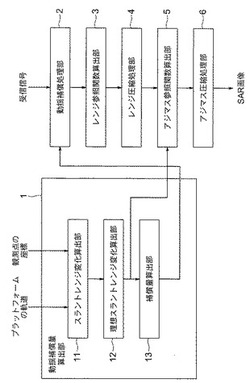
【課題】理想的な直線軌道から逸脱した複雑な軌道条件下で撮像されたSARデータに対しても、適切な動揺補償処理を行うことにより、分解能劣化の伴わない画像を生成することが出来るレーダ画像処理装置を得る。
【解決手段】レーダ画像処理装置は、プラットフォームの実際のスラントレンジ変化Ractとそれを近似する理想的なスラントレンジ変化Ridealとを算出し、実際のスラントレンジ変化Ractと理想的なスラントレンジ変化Ridealとの差分に基づいて動揺補償量φを算出する動揺補償量算出部1と、動揺補償量算出部1により算出された動揺補償量φを用いて受信信号に対して位相補償を行う動揺補償処理部2とを備える。
(もっと読む)
自己安定化アンテナベース

【課題】自動安定化および位置決め制御のためのシステムを有するアンテナ装置(18)を提供すること。
【解決手段】このアンテナ装置は、微小電気機械(MEMS)ベースの加速度計およびジャイロスコープ集積回路(IC)センサ(26)を、ビークル搭載アンテナ用途でのアンテナベース(20)内に直接組み込む。これらのセンサは、外部センサ入力を必要とせずに、ビークルの動きと無関係に所望のビーム掃引範囲を達成するように、アンテナ装置が自動的にアンテナ(22)を安定化することを可能にする。本発明は、外部に取り付けられた方位センサへの通信インターフェースを不要にし、ケーブルI/Oを削減し、設置手順を容易にする。
(もっと読む)
レーダシステム、及び移動体
【課題】 車体の傾きを検知する手段を特に設けなくても、レーダシステムにおけるレーダ装置の軸ずれを検出する。
【解決手段】 車両に搭載されるとともに地軸に対するアンテナの傾きを検出するセンサを有し、前記傾きが基準角度になるように調節される複数のレーダ装置と、前記レーダ装置相互で前記傾きの変化量が一致するか否かを判定し、前記変化量が一致しないときには警告出力を行う制御部とを有するので、移動体にその傾きを検知するセンサを設けなくても、レーダシステムに含まれるレーダ装置の軸ずれを検出することができる。
(もっと読む)
ミリ波誘電体内伝送装置とその製造方法及びミリ波誘電体内伝送方法
【課題】信号処理基板の振動を低減させ、コネクタやケーブルを使わないで信号処理基板間のミリ波の信号を高速に伝送させるようにする。
【解決手段】ミリ波の信号を処理する第1の信号処理基板101と、第1の信号処理基板101に対して信号結合され、ミリ波の信号を受信して信号処理する第2の信号処理基板201と、第1の信号処理基板101と第2の信号処理基板201との間に設けられた所定の比誘電率及び所定の誘電正接を有する粘弾性部材107とを備え、粘弾性部材107が誘電体伝送路を構成する。この構成により、粘弾性部材107が当該信号処理基板101,201に外力が加わったときの振動を吸収するので、第1の信号処理基板101と第2の信号処理基板201の振動を低減させることができ、コネクタやケーブルを使わないで当該信号処理基板間のミリ波の信号を、粘弾性部材107を介して高速に伝送させることができる。
(もっと読む)
レーダ装置
【課題】組付け不良の状態が発生せず、かつ、追加の部材を必要とすることなく振動異音を抑制することができるレーダ装置を提供する。
【解決手段】樹脂カラー5は、突起31の一部が曲げ部3に接触するように曲げ部3の孔2に挿入され、ねじ6は、樹脂カラー5を介して曲げ部3の孔2に挿入される。ねじ6は、曲げ部3を撓ませた状態でブラケット4に組み付けられる。このように曲げ部3を撓ませた状態でねじ6をブラケット4に組み付けることによって、曲げ部3には撓みによる反力が矢印B方向に生じる。
(もっと読む)
走査型測距測角センサ用データ処理装置
【課題】処理能力の制約や移動体の運動や動揺に関わらず移動体と対象物間の相対距離と相対姿勢を高速,高精度に取得する。
【解決手段】開示される走査型測距測角センサ用データ処理装置は、受信強度信号10と距離計測信号11とAZ角度計測信号12を生成する2軸駆動型測距/測角センサ1と、有効強度信号14と有効距離信号18と有効AZ角度信号19と有効EL角度信号20を生成するデータ切り出し処理器2と、データインデックス信号15を生成する有効データ2値化処理器3と、データ集中度インデックス信号16を生成するデータ集中度判定処理器4と、グループ化データインデックス信号17を生成するデータグルーピング処理器5と、ターゲット距離信号21とターゲットAZ角度信号22とターゲットEL角度信号23とグループデータ個数信号24を生成するターゲット抽出/距離・角度生成器6と、その各信号を格納する測距/測角データ格納メモリ7を備える。
(もっと読む)
画像データ処理装置及び画像データ処理方法及びプログラム
【課題】複数アンテナにより、フライトパスのわずかに異なるSAR画像を複数生成し、複数の組合せの中で、最適な組合せのCCD画像を生成し、地形変化を正しく抽出する。
【解決手段】複数のアンテナをもつ合成開口レーダにより、各アンテナで受信した信号から複数のSAR画像を生成する。画像データ処理装置が、画像データ撮像時期、受信アンテナの異なる複数のSAR画像の組合わせから、複数のCCD画像を生成する。10に示す複数のCCD画像から、11に示すとおり、各CCD画像それぞれについて、画素値の和を算出する。次に、12に示すとおり、画素値の和Sが最大となるCCD画像を、フライトパスの影響の最も小さい最適なCCD画像として選択する。以上より、最適なCCD画像を得ることができ、地形変化を正しく抽出することが出来る。
(もっと読む)
追尾型アンテナ制御装置
【課題】衛星が移動体の真上付近にある場合でも、安定した追尾が可能な追尾型アンテナ制御装置を提供することを目的とする。
【解決手段】位相比較器15が、二つのアンテナ素子2L、2Rの受信した信号の位相差から検出した衛星の方向とアンテナ方向のXA軸回りのズレを、低域通過フィルタ16を通し、AD変換器17でサンプリングして電波によるXA軸回りの誤差信号ΔξA.DETを生成する。ATT絶対方位検出器19は、角速度計18の検出した角速度に対し方位軸回転台の傾きの影響を補償した方位軸回転台の絶対方位の角速度の第3成分に、位相比較器15が検出したXA軸回りの誤差信号ΔξA.DETを加え、積算したものをATT絶対方位検出値とし、ATT絶対方位検出値と衛星方位角データの差をATT絶対方位検出誤差として方位軸サーボ制御器20に供給し、方位軸を制御する。また、衛星方位データに基づき、絶対方位の検出値を補正する。
(もっと読む)
情報処理装置及び情報処理方法及びプログラム
【課題】航空機や人工衛星等の移動プラットフォームに搭載され、地表面の高分解能画像及び高度情報を得る干渉型合成開口レーダ装置において、自機高度の測定誤差による地表面の高度情報の誤差を推定して補償することを可能とした干渉型合成開口レーダ装置を提供する。
【解決手段】機体の機軸と直交する平面内で直線状に3つ以上のアンテナ1〜3を配置し、この3つのアンテナで受信されたパルス信号及び動揺センサ4の計測結果を用いて3つの合成開口レーダ画像7を取得し、更に、3つのレーダ画像から2つの観測領域の高度情報9を取得し、2ベースラインによる誤差推定部10が、この得られた高度情報の差分から誤差を推定して補償し、インタフェロメトリ再処理部11が、再度干渉型合成開口レーダの処理を行うことにより、地表面の高度誤差が抑圧された誤差抑圧後の観測領域の高度情報12が得られる。
(もっと読む)
高分解能レーダ装置
【課題】 航空機や衛星などの移動プラットフォームに搭載され、地表や海面の高分解能画像を得る高分解能の合成開口レーダ装置において、画像のボケを補償して分解能を改善する従来のオートフォーカス法では推定できなかった画像のレンジ毎に異なる位相誤差を推定することを可能とした高分解能の合成開口レーダ装置を提供する。
【解決手段】 画像を画像分割部4でレンジ方向に複数に分割し、分割した画像毎に位相誤差傾き推定部9で位相誤差を推定し、推定された位相誤差から位相誤差の傾きを推定し、レンジビン毎の位相誤差を求めることにより、レンジビン毎に異なる位相誤差を推定して位相誤差補償部10で補償することにより、レンジ毎に異なる位相誤差を推定して補償し、分解能を改善する。
(もっと読む)
目標物監視装置、及び目標物監視方法
【課題】複雑なアルゴリズム処理を要することなく、監視対象となる目標物の検出方向を
精度良く決定することができ、安価な構成部品により、目標物の誤検出を防止することが
できる目標物監視装置を提供すること。
【解決手段】監視対象となる目標物を検出する目標物検出部23aと、走行している道路
のカーブR情報を取得するカーブ情報取得部23bと、所定期間内におけるカーブR情報
の変動状態を判定するカーブ変動状態判定部23cとを備え、カーブ変動状態判定部23
cによりカーブR情報の変動状態が所定の変動条件を満たしたと判定された場合、目標物
検出部23aが、所定の閾値条件を満たすカーブR情報を利用して目標物を検出する。
(もっと読む)
船舶用レーダ
【課題】搭載される船舶の動揺に応じて変化するレーダアンテナの姿勢変化に起因するアンテナ方位角の誤差による問題を解消して、小型船舶に搭載する場合でも物標の探知精度および追尾精度を確保する。
【解決手段】姿勢角センサ2は船体のローリング角およびピッチング角をそれぞれ検出し、方位誤差補正部6は船体の進行方向である船首尾方向に平行で且つ正横方向に平行な船体基準面内でのビームの指向方向であるアンテナ方位角と姿勢角(ローリング角,ピッチング角)とに基づいて、アンテナの方位角を水平面に投影した角度を補正アンテナ方位角として求める。レーダ映像データ生成部7および物標追尾部8では、この補正後のアンテナ方位角を用いて処理を行う。
(もっと読む)
レーダ画像処理装置
【課題】参照軌道と実軌道の地表面上の点に対する距離差を精度高く算出し受信信号を補償できるレーダ画像処理装置を得る。
【解決手段】レーダ波の波長を格納する観測パラメータ格納部1と、レーダ観測により得られた受信信号を格納する受信データ格納部2と、レーダ観測時におけるプラットフォームの軌道情報を格納する軌道情報格納部3と、前記プラットフォームの軌道情報から直線状の参照軌道として設定し、受信信号を複数の区画に分割し、区画の中心に相当する地表面上の点を求めて補償の基準点として設定し、合成開口中の各パルス送受信位置で、実軌道上のアンテナ位置と前記基準点の第1の距離、及び前記参照軌道上のアンテナ位置と前記基準点との第2の距離を、前記プラットフォームの移動を考慮しながら求め、第1及び第2の距離の差分である距離変化を算出し、前記波長と距離変化に基づき前記受信信号を補償する動揺補償部20とを設けた。
(もっと読む)
スワスSAR用の効率的なオートフォーカス方法
可動レーダは、パッチから反射された周期的なパルス反射波からパッチの探索モード合成開口画像を生成する。パッチは2以上のオーバーラップするアレイから得られるレーダ反射波から画像化される。強力な散乱体が各アレイ内で突き止められ、その後各アレイからのデータはレーダの運動と強力な散乱体に関して運動補償される。各アレイの運動補償された結果は各アレイの位相誤差を得るためにオートフォーカスされる。各アレイの位相誤差を使用して、接続された位相誤差評価が計算され、各アレイの位相誤差に加算され、アレイ間のオーバーラップで位相間の差を最小にし、アレイ間のオーバーラップ領域には位相不連続性が全く存在しないか最小であることを保証する。位相の不連続性の防止はパッチをレンダリングするアレイの組み合わせのクリアなSAR画像を生成する。 (もっと読む)
被観測対象物の観測方法及び装置
【課題】 航空機の機首方位を制御することにより、合成開口アンテナのヨーステアリング機能を用いずに、干渉させられる画像を得る。
【解決手段】 被観測対象物の上空を飛翔体に搭載した合成開口アンテナ4を水平方向に移動させて、当該合成開口アンテナから電波を送受信する。前記合成開口アンテナ4で受信した反射波を画像データに信号処理する。前記処理を繰返し実行して得た複数の画像データを干渉処理してSAR画像データを取得する。前記合成開口アンテナを移動させる際に、前記飛翔体が受ける横風による偏流角のずれを制御することにより、前記合成開口アンテナの前記被観測対象物に対する観測方向を一致させる。
(もっと読む)
船舶用レーダ装置
【課題】 確実に対象物の位置または方向を認識することができる船舶用レーダ装置を提供することである。
【解決手段】 支柱41およびユニバーサルジョイント42によりレーダアンテナ10および回転装置20等が支持され、回転装置20によりレーダアンテナ10が回転される。アンテナ台下部51に設けられたX軸用モータ43a,Y軸用モータ43bによりアンテナ台上部31の姿勢が水平面と略平行に制御される。また、レドーム60によりレーダアンテナ10、姿勢制御装置40等が外包される。
(もっと読む)
レーダ装置
【課題】 複数本の受信アンテナビームを合成処理することによって、単一の受信ビームの場合と同一の合成開口時間でより広帯域な受信信号を生成し、再生画像のアジマス分解能を改善する。
【解決手段】 受信ビームの中心方向がアジマス方向に異なる複数のアンテナから得られる複数の受信信号から、マルチビームを形成するビーム形成手段と、上記ビーム形成手段で得られたマルチビームを用いてスペクトル合成を行うスペクトル合成手段と、上記スペクトル合成手段の合成信号を逆フーリエ変換した信号に基づいて、Polar Formatアルゴリズムを用いて画像再生処理する画像再生手段とを備える。
(もっと読む)
合成開口処理システムにおけるプラットフォーム動揺補正方法
【課題】 精度が足りず不正確な位置情報を用いても、有効に合成開口処理システムにおけるプラットフォームの動揺補正を行えるようにする。
【解決手段】 プラットフォームの位置情報を周波数解析する段階、周波数解析結果に基づいてプラットフォームの仮想位置情報を生成する段階、生成した仮想位置情報に基づいて信号を切り出す段階、切り出した信号に基づいて合成開口処理する段階からなるものである。
(もっと読む)
ドップラ式対地速度計
【課題】 ドップラシフト測定用の送信波の入射角および反射波の反射角が変化して測定ドップラシフト値ひいては、それから演算される速度値に影響を及ぼすことを防止し、常に高精度の速度測定を行う。
【解決手段】 超音波もしくは電波である送信波(4)を路面(5)に向けて照射し、反射波(6)のドップラ効果による周波数偏移を検出して、対地速度(V)を測定する速度計において、送信器(3)からの送信波(4)をオフセットパラボラ型の反射器(10)で反射させて路面(5)に当て、路面からの反射波(6)を別のオフセットパラボラ型反射器(12)で反射させて受信器(7)で受信する。
(もっと読む)
1 - 19 / 19
[ Back to top ]