
Fターム[5J070AK32]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 測定値異常時の対策 (328)
Fターム[5J070AK32]に分類される特許
201 - 220 / 328
周辺監視システム
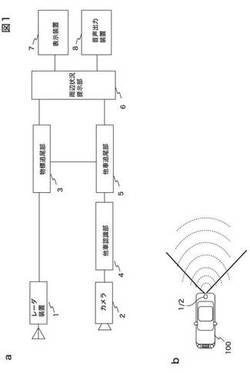
【課題】より速やかに他車の追尾を開始することのできる「周辺監視システム」を提供する。
【解決手段】レーダ装置1の計測データに基づいて、未追尾の他車の検出と、検出した他車の存在の複数回の確認の処理とを経て、存在を確認した他車の追尾を開始する物標追尾部4を設ける。そして、物標追尾部4において、レーダ装置1の計測データから未追尾の他車の発生が検出されなかった場合でも、他車認識部3がカメラ2で撮影した画像に対する画像認識によって、物標追尾部4において未追尾の他車が識別された場合には、レーダ装置1の計測データに基づいて、当該他車の存在を複数回確認する処理を開始する。
(もっと読む)
周辺監視装置

【課題】構成及び制御の複雑化を招くことなく、レーダの軸ずれによる検出誤差を防止する又は検出誤差による制御誤差を防止することができる周辺監視装置を提供すること。
【解決手段】本発明による周辺監視装置1は、車両の周辺の障害物を検出する第一の検出手段5a、5bと、第一の検出手段5a、5bの近傍に位置して、車両の周辺の障害物を検出する第二の検出手段2a〜2fと、第一の検出手段5a、5bの検出結果に基づいて車載機器を制御する制御手段6とを備える周辺監視装置であって、
制御手段6が、第二の検出手段2a〜2fの異常を検出した場合に、第一の検出手段5a、5bの検出結果の検出態様及び/又は前記制御の内容を変更することを特徴とする。
(もっと読む)
車両の障害物検知装置
【課題】物標の位置をより正確に予測することができる障害物検知装置の提供。
【解決手段】自車両前方の物標を検知する障害物検知手段11と、検知物標の情報を受け、自車両の作動機器を制御する作動機器制御手段12とを備え、障害物検知手段11は、所定のサンプリング時間ごとに、物標のまでの距離と、物標との相対速度と、物標の方角とを含む物標データを抽出する物標データ抽出部111と、物標データに基づいて、次回のサンプリング時の物標位置を予測する物標位置予測部112と、検知物標の位置と予測物標の位置とを照合し、同一物標を識別する物標識別部113とを有し、物標データ抽出部111は、物標の横方向の速度成分を更に求め、物標位置予測部112は、相対速度とともに横方向の速度成分を使用して、物標の位置を予測する。
(もっと読む)
高周波センサ装置
【課題】サイドローブが抑圧されたアンテナを備えた高周波センサ装置を提供すること。
【解決手段】確定後修正
送信波を発生する送信部と、前記送信波を放射し、前記送信波の物体による反射波及び透過波の少なくともいずれかを受信波として受信するアンテナと、前記受信波を検知する受信部と、を備え、前記アンテナは、パッチ電極を有する給電素子と、パッチ電極を有する4つの無給電素子と、を含み、前記4つの無給電素子は、前記給電素子を中心としてX字状に配置され、前記4つの無給電素子のそれぞれは、前記パッチ電極の辺のうちで励振方向に対して平行で前記給電素子に近接する辺が、前記給電素子との間においてゼロより大きく4分の1波長よりも短い対向部分を有することを特徴とする高周波センサ装置が提供される。
(もっと読む)
方位検出方法、方位検出装置、プログラム
【課題】装置構成を大型化することなく、虚像による方位の誤検出を防止可能な方位検出方法、方位検出装置、及びプログラムを提供する。
【解決手段】探査波の半波長以上の間隔で配置された一対の送受信素子からなる素子アレーにより、周波数の異なる2種類の探査波を送受信して、各探査波毎に受信信号の位相差φ1、φ2を求め(S210〜S240,S270)、更に、これら位相差φ1,φ2の差からなる方位指標Δφrを求め(S250)、この方位指標Δφrに基づいて、探査波を反射した対象物体が存在する方位θを決定する(S260)。
(もっと読む)
車両の障害物検知装置
【課題】必要性の高い近くの物標を優先的に検出することができる車両の障害物検知装置の提供。
【解決手段】自車両の前方の障害物を検知する障害物検知手段11と、障害物検知手段の障害物の検知感度を変更する感度変更手段12と、を備え、感度変更手段12は、自車両から所定距離以遠の障害物を検知するときの検知感度T1を、所定距離より近くの障害物を検知するときの検知感度T2よりも低くする。
(もっと読む)
走行制御装置
【課題】運転者による制御開始設定操作を頻発させないようにする。
【解決手段】制御対象決定部34は、制御対象領域第2設定部33により設定された制御対象領域内でレーダ装置15により検出された物体の中から自車両の制御対象とすべき先行車両を決定し、この先行車両が制御対象領域から外れた場合に制御対象から解除する。走行制御装置1は、制御対象決定部34により制御対象に決定された先行車両が制御対象を解除されたときには走行制御を停止し、制御対象解除から解除猶予時間が経過するまでに制御対象とすべき物体が決定されたときには走行制御を自動復帰する。先行車両が制御対象から解除された後の自車両の移動方位が、制御対象解除時の先行車両の移動方位に接近している場合に、制御対象領域を制御対象解除時の先行車両の移動方位寄りに拡大補正する。
(もっと読む)
車載レーダ装置
【課題】車両に搭載される車載レーダ装置に関し、前方車両の検出漏れを防止し、且つ障害物を車両と認識するのを防止する。
【解決手段】車載レーダ装置(1)が、自車に対する物体の相対角度検出範囲を3つ以上の領域に分割し、カーブや、一般/高速道路の別等の道路情報、自車の走行速度、更には、天候による路面状況の変化等、車両の置かれた具体的な走行環境に応じて、各領域に、適切な閾値を設定する信号処理部(19)を有する。同一車線の前方を走行中の車両と、障害物とを区別して検出を行うことを可能とし、障害物の検出漏れを引き起こすことを防ぐことを可能にする。
(もっと読む)
物体検知装置
【課題】 自車の進行方向の所定の検知領域に存在する制御対象物体を最小限の時間遅れで精度良く判定する。
【解決手段】 前回検知されたターゲットの位置および相対速から今回のターゲットの位置を予測し、その今回予測位置を中心として広い引継ぎエリア、中程度の3回目出力候補判定エリアおよび狭い2回目出力候補判定エリアを設定する。引継ぎエリア内で連続して検知されたターゲットが2回目の検知で2回目出力候補判定エリアに有れば、その時点でそのターゲットを制御対象物体と判定し、引継ぎエリア内で連続して検知されたターゲットが2回目および3回目の検知で共に3回目出力候補判定エリアに有れば、その時点でそのターゲットを制御対象物体と判定し、引継ぎエリア内でターゲットが4回連続して検知されれば、その時点でそのターゲットを制御対象物体と判定する。
(もっと読む)
物体検知装置
【課題】 物体を検知できなくなったときに該物体のデータを予測して補完する外挿処理の許可回数を適切に設定する。
【解決手段】 同一性判定手段M3は今回の検知時における予測された相対関係と算出された相対関係と比較することで、前回検知した物体および今回検知した物体の同一性を判定し、制御対象物体認識手段M4は同一であると判定された回数が判定回数に達した物体を制御対象物体であると認識する。その際に、外挿手段M5は、前回まで制御対象物体と認識されていた物体と同一であると判定される物体が検知されない場合に、相対関係予測手段M2により予測された物体を実際に検知されたものとして所定の外挿回数だけ外挿を行うとともに、同一性判定手段M3により同一であると判定された回数に比例して前記外挿回数を増加させるので、実際に物体をロストした場合に外挿が必要以上に継続されてロストした物体を対象とする不適切な制御が行われるのを防止することができる。
(もっと読む)
高周波センサ装置
【課題】放射パターンの制御が容易なアンテナを備えた高周波センサ装置を提供すること。
【解決手段】送信波を発生する送信部と、受信波を受信するアンテナと、前記受信波を検知する受信部と、を備え、前記アンテナは、パッチ電極を有する給電素子と、パッチ電極を有する無給電素子と、を含み、前記無給電素子は、前記給電素子をはさんで前記アンテナの励振方向に対して平行な方向に併設され、前記無給電素子の前記パッチ電極の辺のうち前記励振方向と直交し前記給電素子に隣接しない辺の中央近傍からそれぞれ前記励振方向に対して平行な方向に延在する部分を含む伝送線路を有し、前記給電素子と第1の無給電素子との間隔は、前記給電素子と第2の無給電素子とは異なり、前記伝送線路の途中には高周波スイッチが設けられ、前記高周波スイッチのオン及びオフ状態のいずれか一方の状態において前記無給電素子は導波器として作用することを特徴とする高周波センサ装置が提供される。
(もっと読む)
パルス信号弁別回路、このパルス信号弁別回路を用いた二次監視レーダ装置、ATCトランスポンダ装置、及びADS−B受信装置
【課題】本発明は、二次監視レーダ等における解読率向上を図る。
【解決手段】ATCトランスポンダ#1T,#2Tから送信されたパルス変調波を受信して検波回路3で検波するとともに、前記パルス変調波の位相を検出し、その検出した位相に対応する切替制御信号を弁別回路5に供給する。
弁別回路5は、パルス変調波の位相に対応した切替制御信号により、パルス変調波の検波パルスを個々に弁別して対応する解読回路41,42に供給するので、ATCトランスポンダ#1T,#2Tからのパルス変調波が、たとえパルストレインとなって受信されたとしても、各発信源に対応した信号別に弁別して受信解読できる。
(もっと読む)
物体検出手段の試験装置、及び試験方法
【課題】物体検出手段の試験コストを低く抑えつつ、試験精度を向上させることが可能な物体検出手段の試験装置、及び試験方法を提供する。
【解決手段】車両に搭載された物体検出手段を試験する試験装置10であって、物体検出手段から照射される電磁波を反射する反射部材22と、反射部材22よりも先に車両に接触する位置に設置された接触部材24と、車両の走行路上の試験位置と、車両との衝突を回避する回避位置との間で、反射部材22及び接触部材24を一体移動可能に支持する支持手段26と、を備える。
(もっと読む)
車両制御装置
【課題】 自車の走行の障害とならない停止物を対象とする不必要な車両制御が行われるのを防止する。
【解決手段】 レーダー装置で検知した先行車との車間距離が所定値以下になると自動制動を行ったり運転者に警報を発したりして衝突の発生を防止するものにおいて、先行車のような移動物を検知するためのレーダー装置の反射波の受信レベルの閾値(実線で示す移動物用検知閾値)に対し、停止物を検知するための反射波の受信レベルの閾値(破線で示す停止物用検知閾値)を所定の領域で高く設定する。これにより、自車の障害とならないゲートや路上落下物を検知して障害物であると誤認するのを防止し、ゲートや路上落下物に対して必要のない自動制動や警報が行われるのを防止することができる。
(もっと読む)
レーダ装置
【課題】物標検出中であってもなくても故障検出を行える簡素な構造のレーダ装置を提供する。
【解決手段】送信制御部11は、通常のFMCW送信信号とともに、物標検出範囲を定義する周波数よりも高く、設定される物標検出可能範囲を定義する周波数(例えばナイキスト周波数)以下の周波数帯域にスペクトルピークを有する故障検出信号を生成し、前記FMCW送信信号を故障検出信号で周波数変調して送信信号を生成する。検出部9は、物標検出範囲内のスペクトルピークを検出することで物標検出を行い、物標検出範囲外で物標検出可能範囲内の周波数帯域で、閾値以上のレベルのスペクトルピークが検出されなければ、故障と判定する。
(もっと読む)
周辺監視システム
【課題】二輪車までの距離を安定的に精度良く計測する「周辺監視システム」を提供する。
【解決手段】他車認識部3によってカメラ2が撮影した画像b2中の自動二輪車400が、初めて認識されると(a2)、画像b2中の自動二輪車400が写り込んでいる領域410のサイズW2が基準サイズSとして設定され、レーダ装置1で測定した自動二輪車400の相対距離L2が基準距離Dとして設定されることになる(a2)。以降の各時点a3、a4、a5では、他車認識部3によって認識された画像b3、b4、b5中の自動二輪車400が写り込んだ領域410のサイズW3、W4、W5に対する、基準サイズSの比と、基準距離Dに基づいて、各時点における自動二輪車400の相対距離L3、L4、L5を算定する。
(もっと読む)
精測進入レーダ装置
【課題】簡単な構成で、精測進入レーダ装置における送受信器の故障を検出する。
【解決手段】本発明の精測進入レーダ装置は、第1の切換えスイッチ2と第2の切換えスイッチ5を個別に切換え可能な制御器8Aを備えたので、方位空中線部3で送信したレーダ送信信号の目標(9)反射信号を高低空中線部4で受信したり、反対に高低空中線部4で送信したレーダ送信信号の目標反射信号を方位空中線部3で受信する。
そこで、方位空中線部3の送受信器3a,3dと高低空中線部4の送受信器4a,4dとは、構造及び機能が同等に形成されることから、制御器8Aによる同一目標物(ターゲット)9に対する送受信器3a,3d、4a,4dの組み合わせ構成による受信信号レベルの観測値と、正常であるとされる基準レベル(許容限度)との比較から、簡単な構成で、送受信器3a,3d、4a,4dの異常、あるいは故障の有無を検出できる。
(もっと読む)
車両用レーダ装置
【課題】上昇部ビート信号及び下降部ビート信号のピーク周波数から対象物の方位を正しく算出できない状況において、対象物の方位等が誤って算出されることを防止する。
【解決手段】周波数上昇部、周波数下降部からなるレーダ波を送信し、そのレーダ波の反射波を2個のアンテナAR1、AR2で受信した場合に、それぞれの受信信号に関して、周波数上昇部及び周波数下降部毎に、送信信号と受信信号の周波数の差を示すビート信号を生成する。そして、例えば、これらのビート信号を周波数解析した周波数スペクトルデータにおける周波数上昇部の積分値及び周波数下降部の積分値を用いて、ビート信号のピーク周波数を示す波形の正確性を判定し、正確性が劣っていると判定した場合には、方位等の算出を中止する。
(もっと読む)
電子走査式レーダ装置
【課題】簡単な構成で、送受信モジュールの故障を検出可能な電子走査式レーダ装置を提供する。
【解決手段】送受切替器3cにおける漏洩送信パルス信号を選択的に導出可能な切替器7と、漏洩送信パルス信号の信号レベルを検出可能なレベル検出部(検出器)8と、検出された漏洩送信パルス信号の信号レベルと、予め設定された許容基準値とを比較する異常検出部10とを設けたので、簡単な構成で、送受信モジュール3の故障の有無を容易に検出ができる。
(もっと読む)
電子支援計測システムにおける方法、当該方法の使用および装置
本発明は電子計測システム/方向探知装置(ESM1)によって検出される複数の見かけの放射源により放射される信号を処理する方法及び装置に関するものである。前記装置は、見かけの放射源の各々の放射源特徴パラメータの分散に基づいて、前記見かけの放射源の中の真の放射源(21;31;41)および少なくとも1つの偽の放射源を識別するのに適している。偽のおよび真の放射源が識別されると、この情報は偽の放射源による混乱の抑制するためおよび/または1台のESM/DF装置のみによる観測値を使用して真の放射源の位置を決定するために用いられ得る。 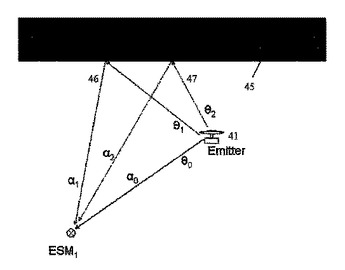 (もっと読む)
(もっと読む)
201 - 220 / 328
[ Back to top ]