
Fターム[5J070AK32]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 測定値異常時の対策 (328)
Fターム[5J070AK32]に分類される特許
161 - 180 / 328
SSRモードSにおけるパーシャル検出航空機の監視方法及び装置
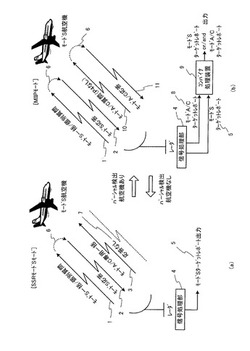
【課題】極力電波環境の悪化を避け、管制に必要なレベルまでパーシャル検出航空機の検出率を上げ、2つのレポート(モードA/CとモードSターゲットレポート)の出力を抑制又は防止する。
【解決手段】信号処理部4は通常はSSRモードSで運用し、パーシャル検出航空機がレーダの覆域又はセクタ等の所定アリアに存在することを自動検出した際、アラームを発出し、そのエリアに対しMIIPモード又はモードSモード等、パーシャル検出航空機からもモードA/C応答が得られるモノパルス形式の質問を含むモードで運用する。必要なエリア等においてのみ各航空機からモードA/C応答を得ることにより、パーシャル検出航空機の検出率を上げることができ、かつ、不要なモードA/C応答を最小限にすることができる。
(もっと読む)
高周波センサ装置

【課題】放射パターンの制御が容易なアンテナを備えた高周波センサ装置を提供すること。
【解決手段】送信波を発生する送信部と、前記送信波を放射し、前記送信波の物体による反射波及び透過波の少なくともいずれかを受信波として受信するアンテナと、前記受信波を検知する受信部と、前記送信波と、前記受信波と、の周波数成分の差を抽出し、ドップラー信号を出力する差分検出部と、を備え、前記アンテナは、パッチ電極を有する給電素子と、パッチ電極を有する無給電素子と、を含み、前記アンテナのゲインが最大ゲインから3dB以内の範囲が、前記パッチ電極を含む平面に対して垂直であり前記給電素子と交差する垂直面により区切られる2つの空間のいずれか一方のみに局在するように前記無給電素子が配置されていることを特徴とする高周波センサ装置を提供する。
(もっと読む)
レーダ装置、レーダ装置の制御装置、レーダ装置の制御プログラム、及びレーダ装置の制御方法
【課題】位相モノパルス式レーダ装置において、アンテナ切替えのスイッチングノイズによる物標の相対距離、相対速度の検知精度の低下を防ぐ。
【解決手段】周波数の上昇区間と下降区間とを含む時間区間ごとにレーダ信号の反射信号を受信する2本のアンテナの組合せを順次切替え、複数の組合せごとに2本のアンテナで受信する反射信号の受信位相差に基づいて物標の角度方向を推定し、前記組合せごとの推定結果から角度方向の検知結果を採用し、レーダ信号とその反射信号の周波数差に基づき物標との相対距離と相対速度を検知するレーダ装置において、前記時間区間の先頭の上昇・下降区間では前記周波数差を用いず、その後の上昇区間と下降区間での前記周波数差を用いて相対速度、相対距離の検知を行う。よって、アンテナ切替えに起因するスイッチングノイズの影響を受けない信号に基づき、相対速度、相対距離を検知できる。
(もっと読む)
AD変換器の故障検出装置
【課題】外部クロックに同期してAD変換するAD変換器の故障を検出するAD変換器の故障検出装置を提供する。
【解決手段】外部クロックの立ち下がりタイミングT0におけるデジタル出力DT0と、その立ち下がりタイミングT0から外部クロックの次の周期の立ち上がりタイミングとなるまでの間に、立ち下がりタイミングT0から所定時間経過後のデジタル出力DT1、DT2を取得し、その取得したデジタル出力DT0とデジタル出力DT1又はDT2とが同じでない(異なる)場合に、AD変換器8の故障と判断する。
(もっと読む)
ノイズフロア強度算出方法,FMCWレーダ
【課題】FMCWレーダにおいて、干渉対策に必要な情報であるノイズフロア強度の検出精度を向上させる。
【解決手段】オーバーサンプリングされたビート信号のサンプリングデータに基づき、チャンネル毎且つ区間(上昇区間,下降区間)毎にビート信号の周波数解析を行う(S110〜S120)。解析結果のうち、ターゲットの検出範囲に対応する検出周波数領域より周波数の高い高周波数領域の周波数成分に基づき、周波数成分の強度(電力値)を尺度とする電力値分布ヒストグラムを作成し(S130)、その電力分布ヒストグラムにて頻度が最大となる電力値を、ノイズフロア強度として抽出し(S140)、その抽出電力値(ノイズフロア強度)が、干渉判定閾値より大きければ(S150:YES)、他レーダとの干渉が発生したものと判定して、干渉対策処理を実行する(S200)。
(もっと読む)
物体検知装置、および照射軸調整方法
【課題】本体の取り付け位置等に関係なく、照射軸調整が同じ位置に設置した、平面を有する調整部材を用いて行える物体検知装置を提供する。
【解決手段】レーダ装置1は、平板20に対してレーザ光を水平方向に走査し、そのときの反射波の強度分布を取得する。そして、反射波の強度が最大であった認識方向を、本体正面に設定する。また、同様に、平板20に対してレーザ光を垂直方向に走査し、そのときの反射波の強度分布を取得する。そして、反射波の強度が最大であった認識方向を、本体正面に設定する。
(もっと読む)
物体検知方法
【課題】コントローラによる制御が不要で、且つ省資源化も可能な物体検知方法を提供する。
【解決手段】車両1の前部に、発光部と受光部を備えたレーダ装置3L,3Rを左右に配置し、左側のレーダ装置3Lの発光部が発射したレーザ光の反射光を右側のレーダ装置3Rの受光部で受信した後に右側のレーダ装置3Rの発光部がレーザ光を発射し、右側のレーダ装置3Rの発光部が発射したレーザ光の反射波を左側のレーダ装置3Lの受光部で受光した後に左側のレーダ装置3Lの発光部がレーザ光を発射する。
(もっと読む)
空港面監視装置
【課題】2つのレーダの覆域が部分的に重なった重畳エリアで航空機の識別を容易にする空港面監視装置を提案する。
【解決手段】サイトマップ設定手段が、基準点品質信号に基づいて、複数のサイトマップの中から所定のサイトマップを選択し、この選択された所定のサイトマップに基づいて、第1サイトの目標検出信号と第2サイトの目標検出信号に通過エリアを設定し、またサイト選定処理手段が、基準点品質信号に基づいて、第1サイトの目標検出信号と第2サイトの目標検出信号のいずれかを選択する。
(もっと読む)
非接触スイッチ装置
【課題】被検知体を確実に検知しつつ操作性を改善できる非接触スイッチ装置を提供する。
【解決手段】複数の方向に電波ビームを放射可能とされたアンテナを含む高周波部と、前記高周波部からのドップラー信号に基づいて被検知体の有無を判断し、前記アンテナから放射される電波ビームの方向を制御する制御判断回路と、前記制御判断回路からの制御出力に基づいて制御信号を外部に出力する負荷制御回路と、を備え、前記制御判断回路は、検知モードにおいては、いずれか1つに電波ビームを放射した時に被検知体の検知を確定すると、検知の確定に対応して前記複数の方向において検知が確定された時に前記負荷制御回路から出力すべき制御信号をそれぞれに決定し、前記検知モードが終了後、スイッチ入力モードにおいては、前記複数の方向のうちのいずれか1つにおける検知の確定に対応して前記負荷制御回路から前記検知モードにおいて決定された制御信号を出力させる。
(もっと読む)
高周波センサ装置
【課題】意図しない動作などが誤検知されずマン・マシン・インタフェースとして使いやすい高周波センサ装置を提供する。
【解決手段】送信波を発生する発振回路と、前記送信波を放射し、前記送信波の物体による反射波を受信波として受信するアンテナと、前記受信波を検知する検波回路と、前記検波回路に含まれるドップラー信号に基づいて被検知体の検知の有無を判定し、前記被検知体の検知を確定すると判定信号を出力する制御判断回路と、を備え、前記制御判断回路は、前記被検知体の検知を確定し判定信号を出力してから所定の時間は、その時間に得られたドップラー信号に基づいて判定信号を出力しないことを特徴とする高周波センサ装置が提供される。
(もっと読む)
車両用障害物検知装置
【課題】車両のフロントエンド部分に配置されたレーダユニットの基準検知軸の方向が所期方向からずれている場合に、その基準検知軸を自動的に確実に補正し調整することができる、車両用障害物検知装置を提供する。
【解決手段】カメラユニット3で撮像された車両前方の特定障害物OSの画像情報に基づいて、その特定障害物OSの位置を検知し、この検知された特定障害物OSの位置とレーダユニット2で検知された同特定障害物OSの位置が一致するか否か判定し、その判定を受けて特定障害物OSの位置が一致しない場合に一致するように、レーダユニット2の基準検知軸BArを自動的に補正する。
(もっと読む)
イベント検出装置
【課題】狭帯域信号を用いても、高精度にイベントを検出できるイベント検出装置を提供すること。
【解決手段】送信機が送信した電波を受信する複数のアンテナ21と、該複数のアンテナ21によって受信した信号を受信ベクトルとして該受信ベクトルから相関行列を演算する相関行列演算手段22と、該相関行列演算手段22によって演算された相関行列を固有値展開して信号部分空間を張る固有ベクトルを演算する固有ベクトル演算手段23と、該固有ベクトル演算手段23によって演算された固有ベクトルの経時変化を検出してイベントを検出するイベント検出手段24と有するイベント検出装置。
(もっと読む)
空港面監視システムおよび空港面監視方法
【課題】空港面に存在する目標の誤検出を減少し、誤ターゲットの表示を抑制できる空港面監視システムを提供する。
【解決手段】ASDE10を用いたASDE追尾系統とMLAT20を用いたMLAT追尾系統を備え、MLAT追尾系統は、MLAT20が出力する目標位置検出情報に基づいて目標近傍の領域に対してはASDE追尾系統のビデオレベル判定部13のスレッショルドレベルを下げ、目標近傍以外の領域に対してはビデオレベル判定部13のスレッショルドレベルを上げるASDEビデオレベル判定用マップ情報205をビデオレベル判定部13に出力するスレッショルドMAP作成処理部23を有している。
(もっと読む)
車載用レーダシステム
【課題】角度確定可能範囲外であっても反射波を受信可能な領域に存在するターゲットに対応することができる車載用レーダシステムを提供する。
【解決手段】電波を送信する送信してターゲットから反射される電波を受信し、得られたターゲット信号からターゲットの距離、相対速度及び方位角度を算出し、ターゲットの方位角度は、所定の角度確定範囲において算出可能であり、ターゲット信号からターゲットが前記角度確定範囲内かどうかを判定して、前記角度確定範囲内にターゲットがあると判定した場合、ターゲットの距離、相対速度及び方位角度に基づいて前記ターゲットが自車に衝突する危険性があるかどうかを判定し、前記角度確定範囲外にターゲットがあると判定した場合、ターゲットの距離及び相対速度に基づいて前記ターゲットが自車に衝突する危険性があるかどうかを判定する。
(もっと読む)
レーダ装置
【課題】高電子移動度トランジスタに特有の故障モードを検出できるようにする。
【解決手段】制御回路31は、ゲート電圧切替部51を制御してトランジスタT1に印加するゲート電圧Vgが検査用電圧V2となるように設定する。検査用電圧V2は、例えばトランジスタT1のピンチオフ電圧Vpに設定する。制御回路31は、検査用電圧V2が印加されたときのドレイン電流Idの電流値を検出する。その電流値に基づいて、トランジスタT1の故障を判別する。故障の判別の際には動作電圧V1とは別に設定された検査用電圧V2をゲート電圧Vgとして印加し、そのときのドレイン電流Idの電流値に基づいて故障の判別を行うようにしたので、通常の動作状態では検出しにくい高電子移動度トランジスタに特有の故障モードの検出ができるようになる。
(もっと読む)
電波軸調整装置および電波軸調整方法
【課題】レーダ装置の左右方向と上下方向の電波軸調整を、電波反射体を前方所定位置に1箇所配置するのみで、アンテナの個体ばらつきを吸収し、短時間で容易にかつ自動的に調整する電波軸調整装置および電波軸調整方法を得る。
【解決手段】車両2とレーダ装置3との接続部に設けられ、車両2に対するレーダ装置3の取り付け角度を調整する軸調整機構4と、電波反射体6を移動させ、電波反射体6の検出限界位置または検出期間に基づいて、電波軸7と進行方向中心軸8とが一致するように、軸調整機構4に動作指令を出力する軸調整制御部5とを備えている。
(もっと読む)
車載ミリ波レーダ装置
【課題】制御装置のマイコンの一部が故障しても安全運転制御を実行可能とする車載ミリ波レーダ装置を提供する。
【解決手段】車載ミリ波レーダ装置1に、ミリ波電波を送受信する送受信部10から100MHzで変調したミリ波電波を送受信させ、第1物体までの距離の算出処理を行うサブマイコン40と、300MHzで変調したミリ波電波を送受信部10から送受信させ、第2物体までの距離の算出処理を行うメインマイコン30と、メインマイコン30が故障したことを検出する故障検出・制御部50とを設ける。そして、故障検出・制御部50がメインマイコン30の故障を検出した場合、メインマイコン30で行われる距離の算出処理をサブマイコン40によって行うようにする。
(もっと読む)
軸調整機能付き車載レーダ
【課題】電波放射方向の軸調整を簡単に行うことができる軸調整機能付き車載レーダを提供する。
【解決手段】モータ30により車載レーダ10の仰角方向のアンテナ12の角度を変化させつつ車載レーダから電波を放射し、そのときの距離に対し、車載レーダ10で受信した電波の受信強度を記憶装置40に順次記憶させる。そして、記憶させた各距離における平均電波強度の和を算出し、算出した平均電波強度の和と現在の他車両105との距離における電波強度の和とを比較し、前回の平均電波強度の和の方が大きければ、モータ30によって車載レーダ10のアンテナ12の角度を前回の角度とし、小さければ、今回の角度とするようにアンテナ12の角度を調整する。平均電波強度の和の算出の際には、他車両105までの距離が遠いほど大きな重みを付ける。
(もっと読む)
レーダ装置
【課題】方位方向に加えて仰角方向の角度誤差を測定でき、プラットフォームが移動していても角度誤差を測定できるレーダ装置を得る。
【解決手段】移動するプラットフォーム1に搭載され、基準目標3に対し電磁波ビームを放射し基準目標からの散乱波を観測する送受信アンテナ2、放射ビームを制御するビーム制御手段8、送受信アンテナに送信信号を送信すると共に、送受信アンテナにより受信される基準目標の信号強度の観測値を得る送受信機9、アンテナ利得の角度特性を記憶した第1のデータベース10、基準目標の座標と電気的特性を記憶した第2のデータベース11、ビーム制御手段による制御値、第1及び第2のデータベースの記憶値、プラットフォームの座標及び姿勢角に基づき基準目標からの信号電力を予測する予測手段12、信号強度の観測値と予予測値との照合に基づき送受信アンテナの取付誤差角度を推定する照合手段13を備える。
(もっと読む)
投光装置
【課題】投射光軸の走査振幅及び光軸調整を容易に行い、且つ高い調整精度を得ることのできる光レーダ用の投光装置を提供することである。
【解決手段】レーザダイオード31が放射した光線の投射方向が投射レンズ37で設定される。この投射レンズ37の位置は位置検出器43a、43bで検出される。上記光線の投光方向はスキャナ制御部25によって投射レンズ37の位置に変換される。上記スキャナ制御部25により得られた投射レンズ37の目標位置と、位置検出器43a、43bで検出された投射レンズ37の検出位置を基に、アクチュエータ40の駆動がスキャナ制御部25によって制御される。上記光線の特定の目標投射方向に対する投光装置の投射方向のずれは、スキャナ制御部25内のメモリ53に補正値として記憶され、この補正値でもって補正されて投射レンズ37の位置に変換される。
(もっと読む)
161 - 180 / 328
[ Back to top ]