
Fターム[5J070AK32]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 測定値異常時の対策 (328)
Fターム[5J070AK32]に分類される特許
101 - 120 / 328
レーダシステム
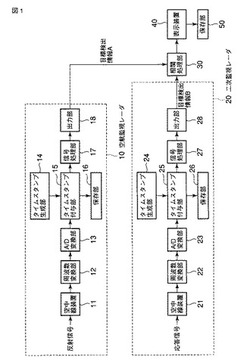
【課題】監視目標に異常が発生した場合に、空港監視レーダ、二次監視レーダそれぞれで取得される目標情報の妥当性を容易に解析できるようにする。
【解決手段】レーダシステムにおいて、空港監視レーダ10では、デジタル変換直後のデジタル信号にタイムスタンプを付与し、タイムスタンプを付与したデジタル信号から検出情報Aを生成し、二次監視レーダ20では、デジタル変換直後のデジタル信号にタイムスタンプを付与し、タイムスタンプを付与したデジタル信号から検出情報Bを生成するものとし、表示装置40において、生成された検出情報A,Bに基づいて目標情報を表示し、この目標情報と同時にタイムスタンプを表示すると共に、表示される目標情報及びタイムスタンプを保存部50に保存する。このように保存されたタイムスタンプを参照することで、各レーダが受信した目標情報のうち、監視目標の目標情報のタイムスタンプと一致するタイムスタンプを付与された目標情報を検索することが可能となる。
(もっと読む)
高周波センサ装置、処理装置、検知システム、物体検知方法及びプログラム

【課題】本発明は、簡単な構成により、レーダ波のメインローブによる検知かサイドローブによる検知かを判別することが出来る検知システムを提供することを課題とする。
【解決手段】センサ装置10は、レーダ波を送信し、反射波を受信する。その際にアンテナ14の側方に電波遮断物16を設け、サイドローブを断続的に遮断する。処理装置20は、受信波が連続的か断続的かにより、メインローブによる検知かサイドローブによる検知かを判別する。
(もっと読む)
合成開口レーダのためのレーダ画像再生装置
【課題】高速に動作しかつ簡易な装置構成で、後段の画像再生処理に変更がない従来のアルゴリズムを用いることができる合成開口レーダのためのレーダ画像再生装置を得る。
【解決手段】アジマス方向に沿ってレーダを移動させながらビームをビーム指向角を変えながら照射し、照射ビームの観測領域中にある散乱体での反射ビームを受信して得たデータからレーダ画像を再生する合成開口レーダのためのレーダ画像再生装置であって、サンプリング帯域を越えたドップラスペクトルの折り返しを解消するドップラ折り返し解消部10と、折り返しが解消されたデータに基づいてレーダの画像再生処理を行うレーダ画像再生処理部50と、を備えたことを特徴とする合成開口レーダのためのレーダ画像再生装置にある。
(もっと読む)
走行制御システム
【課題】先行車を捕捉して車間距離を計測するレーダ装置と、その車間距離を目標値と一致させるべく追従制御を行う手段と、を備える走行制御システムにおいて、何らかの原因により、先行車を捕捉できなくなることがあるので、追従制御を不必要に解除するのを避けつつ、自車の車線変更時に十分な加速性を確保できるようにする。
【解決手段】先行車を捕捉できなくなるとその直前の計測データに基づいて追従制御を続行しつつ、先行車を捕捉できなくなってから所定時間の間、先行車を捕捉できない場合に先行車を見失ったと判定する手段(図1のS1→S4→図2のS11〜S14→図2のS2〜S3→図3のS11およびS12→S15)、自車の車線変更を検出すると先行車を捕捉できなくなったときの計測データに基づく追従制御を停止して設定車速を目標とする定速制御を開始する手段(図1のS1→S4→図2のS11〜S14→図2のS2〜S3→図3のS11〜S13→S15)と、を備える。
(もっと読む)
RFIDタグ検出の方法及びシステム
【課題】検出範囲外に存在するはずのRFIDタグがタグ要求やタグ応答のマルチパス効果によって誤検出されてしまうのを防止する。
【解決手段】複数回送出されたタグ要求206,208に対するRFIDタグ202からの応答212,214の回数と前記タグ要求の回数を比較することにより、前記RFIDタグが所定のエリア内に位置するか否かを判断する。
(もっと読む)
二次監視レーダ装置
【課題】従来の監視方法では監視が困難であったモードS機の応答状態を把握しやすくする。
【解決手段】オールコール期間とロールコール期間とを設定して、航空機を捕捉するモードS二次監視レーダ1であって、オールコール期間にロールコール質問を送信する送信手段122と、ロールコール質問に対応したロールコール応答を受信する受信手段123と、予めオールコール期間に設定されたタイミングで受信したロールコール応答を解読する解読手段132とを備える。
(もっと読む)
距離測定装置
【課題】トランスポンダの動作を監視する監視処理部自体の動作の監視を確実に行い、トランスポンダを正確に動作させるDME(距離測定装置)を提供する。
【解決手段】受信信号の受信及び応答信号の送信を実行するトランスポンダ12aと、受信信号と同一の形式であって、トランスポンダ12aの動作を監視するためのトランスポンダ検査信号を定期的に出力するトランスポンダ検査手段131と、トランスポンダの監視動作を検査するためのセルフ検査信号を定期的に出力するセルフ検査手段132と、トランスポンダからトランスポンダ検査信号に応答して出力される応答信号及びセルフ検査信号を入力して、トランスポンダ及びトランスポンダの監視動作を判定する判定手段137とを有する監視処理部13aと、判定手段137の判定結果に基づいてトランスポンダ12a及び監視処理部13aの動作を制御する制御部15とを備える。
(もっと読む)
吐水装置
【課題】誤検知を防止して、確実に止水しまたは吐水を継続することができる吐水装置を
提供する。
【解決手段】 吐水部と、放射した電波の反射波によって被検知体に関する情報を取得するセンサ部と、前記センサ部からの検知信号に基づいて前記吐水部からの吐水を制御する制御部と、記憶手段と、を備え、前記センサ部から放射される電波の少なくとも一部は、前記吐水部から吐水される吐水流に当たるように配置され、前記制御部は、前記センサ部からの検知信号の所定の周波数帯における強度と、所定の閾値と、の関係を調べることにより、前記吐水流の状態を判定し、前記吐水部からの吐止水を制御することを特徴とする吐水装置。が提供される。
(もっと読む)
レーダ装置
【課題】目標までの距離に応じて最適な距離分解能・相対速度分解能を設定可能なレーダ装置を提供する。
【解決手段】周波数変調すると共にパルス化した電波を送受信して目標203までの距離と相対速度を求めるFMパルス方式のレーダ装置において、送信タイミングから一定時間毎にサンプリングタイミングを定めるレンジゲート手段205と、レンジゲート毎に、周波数上昇区間あるいは周波数下降区間においてサンプリングを行うサンプリング手段206と、サンプリング手段206で得られたサンプリングデータをもとに、フーリエ変換の入力として用いる計測用データを設定し、計測用データの初めから終わりまでのサンプリングに要した時間を計測時間とした時、レンジゲート毎に計測時間を変更する計測時間変更手段207を備える。
(もっと読む)
レーダ装置
【課題】電波の壁などからの反射により発生するゴーストを高精度に判定することができるレーダ装置を提供する。
【解決手段】レーダ装置において、反射特性判定手段は、側方の壁の反射特性を取得する。反射特性判定手段は、取得した壁の反射特性が所定の閾値以上であるか否かを判定する。仮想壁設定手段は、取得した壁の反射特性が所定の閾値以上である場合に、検出したターゲットの側方に仮想壁を設定する。対称位置判定手段は、仮想壁を側方に設定したターゲットに対して、仮想壁と対称な位置にターゲットがあるか否かを判定する。速度判定手段は、仮想壁と対称な位置にターゲットがあった場合に、仮想壁と対称な位置にあるターゲットの速度が、所定の範囲内にあるか否かを判定する。ゴースト判定手段は、仮想壁と対称な位置にあるターゲットの速度が所定の範囲内にある場合に、仮想壁と対称な位置にあるターゲットをゴーストと判定する。
(もっと読む)
ミリ波レーダ用リフレクタ
【課題】雨や雪による反射率の変動が少ないミリ波レーダ用リフレクタ装置を提供する。
【解決手段】ミリ波レーダ用リフレクタ3は、ベース部16を有するポール15と、リフレクタ10と、リフレクタ固定ネジ12によってリフレクタ10が支持部11に固定され、リフレクタ10が支持される支持部11と、支持部11をポール15に固定する固定具13と、固定具13をポールに固定するための固定ネジ14と、を有し、また、リフレクタの材質としては、アルミ材やステンレス材等を用い、表面をテフロン(登録商標)加工、酸化チタン塗布、ウレタン塗装などで雨や雪の付着を防止すると共に、雨や雪が付着しにくいようにリフレクタ10を単純なリング形状とし、空隙を設ける。
(もっと読む)
模擬障害物装置
【課題】試験車両が模擬障害物に衝突する直前に、この模擬障害物を速やかに退避させることができる模擬障害物装置を提供する。
【解決手段】模擬障害物装置10の牽引ユニット11は、車輪30,31を備えたフレーム構体20と、フレーム構体20に搭載された可動ポール装置21を備えている。可動ポール装置21は、水平方向に旋回可能なポール部材51と、ポール部材51に設けられた模擬障害物53と、ポール部材51を旋回させる駆動機構52を備えている。ポール部材51は、模擬障害物53を試験車両の進路上に配置する第1の位置と、模擬障害物53を試験車両の進路上から退避させる第2の位置とにわたって、駆動機構52によって旋回させることができる。試験車両に搭載された自動ブレーキシステムが作動したときに出力される旋回指示信号が制御装置22に入力されると、駆動機構52が作動することにより、ポール部材51が前記第1の位置から第2の位置に旋回する。
(もっと読む)
レーダシステム
【課題】目標を安定して追尾することが可能なレーダシステムを提供する。
【解決手段】Xバンドのレーダ映像中に偽像又はクラッタが存在し、さらに、各ARPA装置8a、8bが同一の目標をそれぞれ追尾している場合に、追尾部17bの目標追尾部26は、Sバンドの目標の位置を指示機16aに送信し、指示機16aの追尾位置比較部44は、受信した指示機16bからの目標の位置と、追尾部17aの目標追尾部26からのXバンドの目標の位置との差分を求め、前記差分が所定の閾値を上回るときに前記差分を追尾部17aの目標追尾部26に出力する。該目標追尾部26は、前記差分を用いて目標の位置を補正する。
(もっと読む)
車載用レーダ装置
【課題】 間違った目標捕捉(乗り移り)の発生を回避できる車載用レーダ装置を提供する。
【解決手段】 自車(10)前方にパルス状の電磁波(12)を周期的に照射し、その反射波(13)に基づいて、少なくとも目標の水平方向の幅を測定する車載用レーダ装置(11)において、前記反射波の先回または数回前の強さと今回の強さとを比較する比較手段(17)と、今回の反射波の強さが急減少し、且つ、前記目標の水平方向の幅が一般的車両の水平方向の幅を超えたときに間違った目標であると判定する第1判定手段(17)とを備える。または、今回の反射波の強さが急増大したときに間違った目標であると判定する第2判定手段(17)を備える。
(もっと読む)
無線周波数近接センサ及びセンサ・システム
【課題】車両の死角における物体検知を行い、他の検知システムと干渉しない、近接センサを提供する。
【解決手段】周波数が異なる複数の無線周波数(RF)信号を送信し、反射したRF信号を受信し、中間周波数(IF)信号を送るように、構成される。各IF信号は反射RF信号の1つを代表し、各反射RF信号はセンサの検出領域内の物体によって反射された送信RF信号に対応する。センサは、IF信号を用いて、物体がその検出領域内にあるかどうか及びその移動方向を決定する。
(もっと読む)
レーダ出力最適化方法、およびレーダ出力最適化装置
【課題】レーダ装置をカバー部材の内側面から離して配置する場合において、放射損失を極力抑えられるようにする。
【解決手段】レーダ出力最適化装置1においては、レーダ装置100を基準位置と終点位置との間の範囲内で変位させるレーダ可動治具60と、バンパ110を透過後のレーダ波の出力を検出するパワーメータ51と、を備えている。制御装置は、レーダ可動治具60にレーダ装置100を基準位置から終点位置まで変位させ、この際に、パワーメータ51による検出結果を、基準位置とレーダ装置100の位置との位置関係に対応させながらモニタリングし、モニタリング結果に基づいてレーダ波の放射損失が最小値となる位置関係を抽出する。そして、基準位置とレーダ装置100の位置との位置関係が抽出された位置関係になるように、レーダ可動治具60にレーダ装置100を変位させる。
(もっと読む)
モードS二次監視レーダ
【課題】モードS二次監視レーダによるトランスポンダの捕捉の精度を向上させる。
【解決手段】ロールコール期間で捕捉する登録機に関する情報が登録される登録テーブル138と、ロールコール期間における捕捉の対象の候補である仮登録機に関する情報が登録される仮登録テーブル137と、オールコール期間に登録機以外の航空機からオールコール応答以外の信号を受信したとき、航空機を仮登録機として仮登録テーブル137に登録する仮登録部132dと、ロールコール期間に登録機にロールコール質問を送信するとともに、仮登録機にロールコール質問を送信する送信制御部131と、ロールコール質問に応答して、仮登録機からロールコール応答を受信したとき、仮登録機を新たな登録機として登録テーブルに登録する登録部132eとを備えている。
(もっと読む)
レーダ装置、および保持部材
【課題】レーダ装置をカバー部材の内側面から離して配置する場合において、障害物を検出する能力にばらつきが生じることを防止し、受信波の検出特性を安定させる。
【解決手段】レーダ装置1においては、レーダ装置1とは非接触に構成され、かつ送信波を透過する透過部位を有するとともに透過部位の設置角度が受信アンテナ20のアンテナ面(アンテナ5)に対して3度以上の傾斜角を有するバンパ110によって、送信アンテナ18および受信アンテナ20が送信波の送信方向側から覆われて構成されている。従って、バンパ110の透過部位と受信アンテナ20のアンテナ面とに所定の傾斜角を持たせているので、アンテナ面とバンパ110との間で繰り返し送信波が反射されることによる定在波が発生し難くすることができる。よって、障害物を検出する能力にばらつきが生じることを防止することができ、受信波の検出特性を安定させることができる。
(もっと読む)
車両
【課題】 誤検出することなく前方の車両や物体を検出できる衝突防止用のセンサを備えた車両を提供すること。
【解決手段】 ゴルフカート10に、追突防止センサと障害物センサ33a等を設けた。追突防止センサは、後方に電波aを発信する送信器31と、前方のゴルフカート10aとの距離が一定距離以内になったときにゴルフカート10aの送信器31から発信された電波aを受信する受信センサ32とからなる。障害物センサ33a等は、電波aの発信距離よりも長い距離に亘って前方に超音波bを発信し、物体に衝突して戻ってくる超音波bを受信することにより前方の物体を検出する。そして、受信センサ32が電波aを受信したときにゴルフカート10は停止し、受信センサ32が電波aを受信せず、障害物センサ33a等が物体を検出したときにゴルフカート10は低速走行するようにした。
(もっと読む)
降雨減衰判定装置及びそれを用いた降雨観測システム並びに降雨減衰判定方法
【課題】 降雨データ取得不能領域を降雨減衰によるものであるか判定する簡易で計算負荷の小さい降雨減衰判定装置及びそれを用いた降雨観測システム並びに降雨減衰判定方法を提供する。
【解決手段】 取得した観測データから減衰係数及び片道経路積算減衰量を計算する減衰演算手段311と、大気減衰等から最小受信感度を計算する最小受信感度演算手段312と、あらかじめ設定した検知限界降雨強度から検知限界反射強度を計算する検知限界演算手段313と、減衰演算手段311、最小受信感度演算手段312及び検知限界演算手段313で求めた値を比較した結果から検知不能領域を推定する検知不能領域推定手段314と、を備えたことを特徴とする。
(もっと読む)
101 - 120 / 328
[ Back to top ]