
Fターム[5J070AK32]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 測定値異常時の対策 (328)
Fターム[5J070AK32]に分類される特許
21 - 40 / 328
車載レーダ装置の調整システム
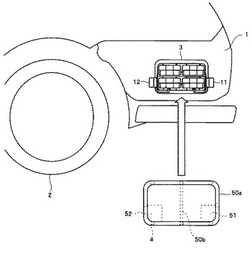
【課題】作業スペースを確保することが困難な場所においても確実に車載レーダ装置の調整を行うことができると共に、作業者の熟練を要することなく容易にレーダ装置の調整を行うことを可能とする。
【解決手段】作業者が試験装置の装置筐体50aを車体フレーム1に装着して送信アンテナ11及び受信アンテナ12を覆うことで、送信アンテナ11及び受信アンテナ12と非接触且つ電磁シールドされた環境を最小限の調整スペースで実現する。そして、レーダ装置の調整モードスイッチをONすると、レーダ装置が自己調整モードに移行し、試験装置を介したループバック試験で自動的にキャリブレーションが行われる。
(もっと読む)
位置決め装置の異常変位を判定するためのシステム、方法、および装置

【課題】 空間内の位置決め装置が変位されたかどうかを判定するための技術的解決法を提供する。
【解決手段】 本発明の実施例では、空間内の位置決め装置が変位されたかどうかを判定するためのシステム、方法、および装置が提供される。具体的には、測距信号を発する機能を有するタグと、当該タグからの測距信号に基づいて、当該タグが位置する位置点の位置決め装置に対する相対座標を取得するように構成された位置決め装置と、空間内の位置点の相対座標、位置決め装置の較正パラメータ、および信頼済み絶対座標に基づいて、位置決め装置が変位されたかどうかを判断するように構成されたサーバとを備えることのできるシステムが提供される。本発明の実施例により、位置決め装置が変位されたかどうかの判定を正確、包括的、かつリアルタイムに行うことができる。
(もっと読む)
レーダ装置、及び方位算出方法
【課題】異なるターゲットに対応する周波数スペクトルが重なった場合でも、各ターゲットの方位を正確に算出可能なレーダ装置に関する技術を提供することを課題とする。
【解決手段】少なくとも二つの受信アンテナを介して受信される反射波を、各受信アンテナの受信信号として受信し、送信信号と受信信号から生成されるビート信号のピーク周波数の位相差を算出し、算出された位相差を記憶領域に記憶し、算出された位相差に基づいてターゲットの方位を算出する。また、算出された方位に関する方位情報を含む、ビート信号のピーク周波数の変化を予測する予測情報に基づいて、複数のターゲットのピーク周波数が重なるか否かを予測し、記憶領域に記憶される位相差に基づいて、ピーク周波数が重なる際の位相差を予測位相差として算出し、ピーク周波数が重なると予測される場合、予測位相差に基づいてターゲットの方位を算出する。
(もっと読む)
二次監視レーダ
【課題】二次監視レーダから航空機に有用な情報をTIS−Bの信号として配信する。
【解決手段】航空機に質問信号を送信する送信手段と、航空機から送信される質問信号に応答して送信される応答信号を受信する受信手段とを有し、当該受信手段が受信する応答信号を利用して航空機の飛行を監視する二次監視レーダであって、所定の範囲にADS−Bを搭載する航空機であるADS−B搭載機が存在するとき、ADS−B搭載機に送信するTIS−B信号を生成する生成手段を備え、送信手段は、生成手段が生成したTIS−B信号を送信する。
(もっと読む)
位置推定装置及び位置推定方法
【課題】ビームアンテナを利用した位置推定において、高精度に位置推定を行なうことを課題とする。
【解決手段】位置推定装置は、指向性アンテナから出力されるビームの方向を制御し、制御された方向での指向性アンテナから出力されるビームを第1周波数で出力する。また、位置推定装置は、出力されるビームを第1周波数で出力した後に、第1周波数とは異なる第2周波数で出力する。また、位置推定装置は、第1周波数のビームの出力が到達した無線タグを有する端末装置から当該無線タグのIDを取得する。また、位置推定装置は、第2周波数のビームの出力が到達した無線タグを有する端末装置から当該無線タグのIDを取得する。また、位置推定装置は、第1周波数及び第2周波数のビームで共通に取得されたIDを特定し、特定されたIDとビームの方向とを出力する。
(もっと読む)
移動体管理装置
【課題】タグを有しない移動体を的確に判定することのできる移動体管理装置を得る。
【解決手段】ID付き移動体動線作成部2は、ID付き移動体位置検知部1a,1b,1cの検知結果からタグの時空間の動線をID付き移動体動線として作成する。移動体動線作成部4は、移動体位置検知部3a,3b,3cの検知結果から移動体の時空間の動線を移動体動線として作成する。動線比較部5は、ID付き移動体動線と移動体動線とを比較し、動線が近いものを対応付ける。判定部6は、動線比較部5において、対応付けがなされない動線の移動体をタグを有しない移動体として判定する。
(もっと読む)
電子キーシステムのキー位置判定装置
【課題】電子キーの位置をより精度よく検出することができる電子キーシステムのキー位置判定装置を提供する。
【解決手段】車両の運転席アンテナ及び助手席アンテナから交互に電波を送信して、これら電波を電子キーが受信したときの磁界強度Hd,Hpと電波到来方向Kd,Kpとを算出する。そして、磁界強度Hd,Hpの大小を比較して、電子キーの車外位置を判定する。このとき、磁界強度Hd,Hpのうち高い側が磁界強度範囲Eaに位置して、単なる大小判定ではキー位置を判定できない場合、電波到来方向Kd,Kpの電波角度差θxからキー位置を判定する。電波角度差θxが重複範囲Ebに位置してキー位置を判定できない場合、電波角度差θx及び2つの磁界強度Hd,Hpを繋いだ三角線25を算出し、この三角線25が成す角度θrにより、キー位置を最終判断する。
(もっと読む)
ICタグ交信範囲表示装置およびICタグ交信範囲表示方法
【課題】ICタグの交信距離の校正を簡易に行って、現場環境と交信範囲との整合をとり、交信範囲を表示する。
【解決手段】予め、リーダライタ1の出力強度を最小にして、リーダライタ1とICタグ3との距離を最大交信距離としたときのICタグ3の最小動作電力Rtsと、そのときにリーダライタ1がICタグ3から受信した応答波の受信電力である基準受信電力Rrwsとを、予め実測しておく。次に、リーダライタの出力強度Prwおよびアンテナ利得Gantを、式(4)に適用して、この出力強度Prwのときの推定最大交信距離D’maxが算出される。また、受信電力Rrwと基準受信電力Rrwsとを式(5)に適用して、補正距離dが算出される。そして、アンテナ2とICタグ3との交信距離Dが、式(6)を用いて算出される。
(もっと読む)
シミュレータ
【課題】信号の輻輳、輻輳、フルーツ干渉等の発生時における二次監視レーダ及びSIF装置の動作を検証する。
【解決手段】対象範囲に検証の対象として所定時刻に存在が想定される機体の位置と、当該機体が応答する信号の種別と、当該機体の送信信号の情報を関連付ける機体データを記憶する機体データ記憶部13eと、動作を検証する装置が機体に送信した所定形式の信号を入力すると、機体データから、入力した信号の送信対象である機体の位置及び信号の種別と関連付けられる送信信号の情報を検索する機体検索手段13fと、機体データから検索された送信信号の内容を合成して模擬信号を生成する応答発生手段13gとを備える。
(もっと読む)
電波目標模擬装置およびレーダ評価方法
【課題】 小型で広帯域な電波目標模擬装置を得る。
【解決手段】 目標を模擬する擬似信号を発生する擬似信号発生装置と、光信号を発生し上記光信号の波長を可変できる波長可変光源と、上記擬似信号により上記光信号を強度変調した光変調信号を発生する光変調手段と、上記光変調手段の出力に接続された入力ポートおよび複数の出力ポートを有し、上記光変調信号をその波長に対応する出力ポートに出力する光分波器と、上記光分波器の複数の上記出力ポートにそれぞれ接続され、上記光変調信号を上記擬似信号に対応する電気信号に変換する複数の光電変換器と、上記複数の光電変換器にそれぞれ接続され、上記電気信号を電波として空間に放射する複数の素子アンテナと、を備えたことを特徴とする。
(もっと読む)
距離測定装置
【課題】モニタ部が使用するパルス検出のポイントがずれないようにし、トランスポンダが送出するペアパルス信号をこのペアパルス信号の正確な位置において検出することが出来る距離測定装置を提供する。
【解決手段】アンテナ部11、トランスポンダ部13、方向性結合器12a、トランスポンダ部13から擬似質問信号に応答して2つのパルスを含むペアパルス信号でパルス変調された応答信号を入力されるモニタ部14とを備え、モニタ部14は、入力された応答信号を検波し、2つのパルス状のピークを有する波形信号を出力する検波部25aと、検波部25aが出力する波形信号のレベルが所要のスレショルドを越える期間を計測し、計測後、波形信号を所定時間遅延させ、この遅延させた波形信号の波形中のスレショルドを越えた点から期間の半分の期間が経過した点を波形信号の中心位置としてパルスを検出するパルス検出部42とを備える。
(もっと読む)
レーダ装置
【課題】ゴーストの検出を抑え、更に相互相関の程度を抑圧することが可能であるレーダ装置を提供する。
【解決手段】送信アンテナ群と、受信アンテナ群と、送信切替手段と、仮想相関値取得手段と、ターゲット検出手段と、を備え、送信アンテナ群は、受信アンテナ群に包含され、送信切換手段は、受信アンテナ群に含まれる一部又は全部の受信アンテナを順次、送信アンテナとして機能させ、送信アンテナ群及び受信アンテナ群は、左右対称且つ不等間隔に一列に並べる。
(もっと読む)
自己位置推定装置、自己位置推定方法及びプログラム
【課題】自己位置の推定を高精度に行うこと。
【解決手段】自己位置推定装置10は、検出領域内の物体との距離情報を検出する距離センサ11を備え、距離センサ11により検出された物体との距離情報に基づいて、自己位置を推定する。また、自己位置推定装置10は、距離センサ11の検出領域を複数の小領域に分割し、距離センサ11により検出された物体の距離情報と、地図情報とに基づいて、小領域毎に自己位置を判定する小領域判定手段と、小領域判定手段により判定された小領域毎の自己位置の判定に基づいて、自己位置が正常であるか否かを最終的に判定する自己位置判定手段と、を備えている。
(もっと読む)
信号処理装置
【課題】本発明は、目標から到来した波動信号を処理し、クラッタの除去または抑圧を図る信号処理装置に関し、構成が大幅に複雑化することなく、誤警報確率を低く設定し、かつ安定に維持できることを目的とする。
【解決手段】目標から到来する波動信号と前記波動信号の瞬時値の平均値との差を求める信号抽出手段と、前記波動信号の瞬時値と、所定の係数と前記平均値との積とを比較する比較手段と、前記波動信号の瞬時値が前記積より大きい場合と小さい場合とに、それぞれ前記波動信号の瞬時値と前記差とを選択し、前記選択された瞬時値および差の列を前記目標の識別に供する選択手段とを備える。
(もっと読む)
距離測定装置及び距離測定装置監視システム
【課題】トランスポンダの動作の検証を容易にし、動作検証の効率を向上させる。
【解決手段】ツインパルスを含む質問信号を入力すると、当該質問信号に応答して応答信号を送信するトランスポンダ12と、トランスポンダに質問信号と同一形式の疑似質問信号を送信し、トランスポンダから疑似質問信号に応答する応答信号を受信し、トランスポンダの動作を監視する監視処理部13とを有し、監視処理部13は、疑似質問信号を生成する際、ツインパルスのパルス間隔を調整するパルス間隔調整手段131cと、パルス間隔が所定値の疑似質問信号を送信後にトランスポンダから応答信号を受信しない又は応答信号の受信が遅延したときアラーム信号を出力するとともに、パルス間隔が所定値以外の疑似質問信号を送信後にトランスポンダから応答信号を受信したときアラーム信号を受信したときアラーム信号を出力する監視手段134bとを備える。
(もっと読む)
多重チャンネル受信機システムと多重チャンネル受信機監視方法
多重チャンネル受信機システム(10)は、第1の複数の受信回路(12、14)と、アップコンバージョンミキサー(38)とを備え、各受信回路は、第2の複数の入力ラインの対応する1つに接続された第1の入力と、局部発振信号を提供するように構成された局部発振器(28)に接続された第2の入力と、第4の複数の出力信号の対応する1つを提供するように構成された出力とを有し、各入力ラインは、第3の複数の受信信号の対応する1つを提供するように構成され、アップコンバージョンミキサーは、基準信号(42)を受信する第1のミキサー入力(40)と、局部発振器に接続された第2のミキサー入力(44)と、第5の複数の方向性結合器(48、50)にアップコンバートされた基準信号を提供するミキサー出力(46)とを有し、第5の複数の方向性結合器の各方向性結合器は、第2の複数の入力ラインの対応する1つに接続される。 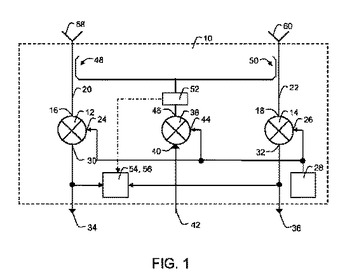 (もっと読む)
(もっと読む)
目標追尾処理器及びそれに用いる誤差共分散行列の補正方法
【課題】 観測値の入力頻度が低下した場合、または観測値の入力が無くなった場合においても、誤差共分散が過度に大きくなったり、異常な値となったりすることを防止することが可能な目標追尾処理器を提供する。
【解決手段】 目標追尾処理器は、目標の位置を観測するセンサの観測値からその目標の位置、速度及び針路を状態変数として推定するカルマンフィルタを用いた目標追尾を行う。また、目標追尾処理器は、状態変数の分散を表す誤差共分散を補正する手段(ダミー作成起動部20、ダミー観測時刻作成部21、ダミー観測値作成部22)を有する。
(もっと読む)
レーダ装置
【課題】高精度に目標を観測できるレーダ装置を提供する。
【解決手段】第1送受信兼用素子と第2送受信兼用素子とに分割された送受信兼用素子11aと、第1受信専用素子と第2受信専用素子に分割された受信専用素子12aを備えたアンテナ10と、観測角度範囲を複数に分割して、アンテナの各素子により、分割した角度範囲の各々を覆うように送信ビームを形成し、受信は、アンテナの各素子のビーム指向方向を第1送受信兼用素子と第2送受信兼用素子と同じ方向にして、第1送受信兼用素子と第1受信専用素子、第2送受信兼用素子と第2受信兼用素子により、ΣとΔの位相モノパルスビームを形成して複数の角度範囲の各々を覆い、第1送受信兼用素子、第2送受信兼用素子、第1受信専用素子および第2受信専用素子により、狭ビーム幅のビームを形成するビーム成形部34と、ビーム成形部で形成されたビームに基づきモノパルス測角を行う測角部37を備える。
(もっと読む)
障害物検出装置
【課題】道路構造物を障害物として誤検出することを防止可能な障害物検出装置を提供する。
【解決手段】障害物検出装置1は、ECU2、実測データ生成部3および車両状態計測部4を備える。ECU2は、データベース5、予測データ生成部6および障害物検出部7を有する。実測データ生成部3は、車両周辺の所定領域に存在する物体からのレーダ反射に基づいて物体を検出し、検出結果を示す実測データを生成する。データベース5は、所定領域に存在する道路構造物に関する道路構造物データをあらかじめ保持する。車両状態計測部4は、車両の現在位置および現在姿勢を含む車両状態を計測する。予測データ生成部6は、車両状態および道路構造物データに基づいて、道路構造物からのレーダ反射を予測して予測結果を示す予測データを生成する。障害物検出部7は、実測データおよび予測データに基づいて障害物を検出する。
(もっと読む)
レーダ装置
【課題】ビート周波数を入力する追尾フィルタと、ペアリング後の観測値を入力とする追尾フィルタを併用して用いることで、アップチャープとダウンチャープ時のビート周波数のピーク数が異なる場合においても目標の追尾精度を向上することができ、誤ペアを除去することができるレーダ装置を得る。
【解決手段】FMCW信号を受信して、受信信号と送信信号とからビート信号のピークを検出し、ビート周波数の対応付け及び測角処理を実施して目標情報を生成する信号処理器1と、ビート周波数を入力して目標の位置と速度を更新するビート周波数追尾フィルタ2と、目標の位置と速度の観測値を入力して目標の位置と速度を更新するペア観測値用追尾フィルタ3と、前記両追尾フィルタの追尾航跡同士を統合もしくは選択する統合選択器4と、システム航跡メモリ5と、異常値判定器6とを設けた。
(もっと読む)
21 - 40 / 328
[ Back to top ]