
Fターム[5J070BF21]の内容
レーダ方式及びその細部 (42,132) | 衝突防止 (1,451) | レーダデータと他のデータとの結合 (112)
Fターム[5J070BF21]に分類される特許
101 - 112 / 112
交通渋滞と「つるつる路面」検知装置および河川流量計測監視装置と防災防犯監視および防災救助装置

【課題】交通渋滞および降雪地域における「つるつる路面」の検出とそれを告知する対策は急務である。これらを解決するために映像やセンサーが数多く設置させる。その場合、動画像を光ケーブルなどのネット回線を利用するところとなるが、センサーデータと動画像が回線に占める占有率が増大し、回線の効率は劣化する。
【解決手段】マイクロ波を感知しこれを音声波形データに変換する。棄却閾値以外の値を抽出して補正し誤差を最小とすることで、交通渋滞、「つるつる路面」の検知と河川の流計測における表面の速度を測定する。これに映像を加え映像は動画の差分を抽出し、センサーと組み合わせて遅延画像を蓄積することにより、ネット上の回線の占有率を大幅に引き下げる。緊急時には整備したこれらの機器を非常用の通信機器として使用する。広くドライバーに告知することは事故防止につながる。河川にあっては水害対策および観測者の安全確保を実現する。
(もっと読む)
物体検出装置

【課題】 検出した物体に高精度な情報を設定できる物体検出装置を提供することを課題とする。
【解決手段】 レーダによる情報と画像による情報に基づいて物体を検出する物体検出装置1であって、レーダによって物体を検出するレーダ検出手段2と、画像によって物体を検出する画像検出手段3と、レーダ検出手段2によって検出した物体の位置情報と画像検出手段3によって検出した物体の位置情報に基づいて、レーダ検出手段2によって検出した物体と画像検出手段3によって検出した物体とが同一物体か否かを判断する判断手段8とを備え、判断手段8で同一物体と判断した物体については、レーダ検出手段2によって検出した当該物体の横方向のデータと画像検出手段3によって検出した当該物体の横方向のデータとの位置関係に基づいて横幅及び/又は横位置の設定方法を変更することを特徴とする。
(もっと読む)
物体検出装置
【課題】 物体を高精度に検出する物体検出装置を提供することを課題とする。
【解決手段】 レーダによる情報と画像による情報に基づいて物体を検出する物体検出装置1であって、レーダによって物体を検出するレーダ検出手段2と、画像によって物体を検出する画像検出手段3と、レーダ検出手段2によって検出した物体の位置情報と画像検出手段3によって検出した物体の位置情報との関係が判断基準を満たしている場合にレーダ検出手段2によって検出した物体と画像検出手段3によって検出した物体とが同一物体と判断する判断手段8とを備え、物体までの距離が長い場合には判断基準を同一物体と判断し易くなるように変更することを特徴とする。
(もっと読む)
物体検出装置
【課題】 物体を高精度に検出する物体検出装置を提供することを課題とする。
【解決手段】 レーダによる情報と画像による情報に基づいて物体を検出する物体検出装置1であって、レーダによって物体を検出するレーダ検出手段2と、画像によって物体を検出する画像検出手段3と、レーダ検出手段2によって検出した物体の位置情報と画像検出手段3によって検出した物体の位置情報に基づいて、レーダ検出手段2によって検出した物体と画像検出手段3によって検出した物体が同一物体か否かを判断する判断手段10とを備え、判断手段10は、画像検出手段3によって検出した物体に対してレーダ検出手段2によって検出した物体が複数個対応している場合、当該複数個の物体のうち車両中心の推測走行軌跡に近い物体を同一物体と判断することを特徴とする。
(もっと読む)
車載用レーダ装置
【課題】 走行区画に存在する目標物を精度良く検出することの出来る車載用レーダ装置の提供
【解決手段】自車両15前方に向けて扇形の走査範囲RGに渡り送信信号OSを一定の送信周期で電磁波として放射する送信アンテナ3、放射された電磁波が目標物で反射された反射波を受信して受信信号RSを出力する複数の受信用アンテナ5、受信信号と送信信号から周波数複素振幅スペクトルを演算するスペクトル演算手段9、自車両の進行方向RDを演算取得する進行方向演算取得手段11、取得された進行方向に基づいて、周波数複素振幅スペクトルの、進行方向に対応する方向成分を演算抽出しその演算結果データを出力する進行方向成分抽出手段10、演算結果データに基づいて自車両の距離方位スペクトルを演算する距離方位スペクトル演算手段12、演算された距離方位スペクトルに基づいて、自車両の前方の目標物を検出する目標物検出部13を有して構成される。
(もっと読む)
センサ異常検出装置及びセンサ異常検出方法
【課題】実走行環境下での常時検出に好適で処理負担が少ない構成により、車両に搭載した車外監視センサの外観からは判断がつきにくい軸ずれ等のセンサ異常の信頼性の高い検出を行う。
【解決手段】車両1aの測距レーダ2aが受ける衝撃を加速度センサ3によって検出し、センサ3の外観からは判断がつきにくい軸ずれ等のセンサ異常が生じる一定範囲の衝撃検出に基づき、異常判定手段により、測距レーダ2aが異常であると判定して測距レーダ2aのセンサ異常を検出し、判定結果処理手段により、前記センサ異常の検出結果を故障診断情報として保持し、警報出力する。
(もっと読む)
自動車用レーダーシステム
レーダーセンサ(10)と、車両の周囲にある対象の距離(D)と相対速度(V)を測定する評価装置(12)と、測定された距離と相対速度を用いて差し迫った衝突を認識して、予測される衝突時点(Tc)と衝突速度(Vc)に関するデータをプリクラッシュシステム(20)へ供給する衝突認識装置(18)とを有する自動車用レーダーシステムは、レーダーセンサ(10)が、衝突認識装置(18)によって速度測定モード(CW)へ切り替え可能であって、速度測定モードにおいて相対速度(V)のより正確な測定が行われることを特徴とする。 (もっと読む)
車両用制御対象判定装置
【課題】 隣車線から自車線に侵入して制御対象となる他車両を的確に判定できるようにする。
【解決手段】 レーダー装置14により検知された物体が自車の走行軌跡に接近する横方向相対速度を横方向相対速度検出手段M2で検出するとともに、前記物体が自車に接近する進行方向相対速度を進行方向相対速度検出手段M3で検出し、物体を制御対象と判定するための確定度を算出する確定度算出条件を、確定度算出手段M4が横方向相対速度および進行方向相対速度に基づいて変更するので、隣車線の他車両が自車線に割り込もうとして横方向相対速度および進行方向相対速度が変化したときに確定度を変化させることで、制御対象判定手段M5が前記他車両を制御対象の候補として認識し易くし、自車線に割り込もうとする他車両を制御対象として判定する精度を高めることができる。
(もっと読む)
近距離レーダー測定用のマルチスタティックセンサ装置およびこのセンサ装置の駆動方法
対象物までの距離を測定するマルチスタティックセンサ装置は、送信ユニット(Tn)および受信ユニット(Rm)を有しており、これらはそれぞれ1つずつ高周波数発振器(HFO‐Tn,HFO‐Rm)およびパルス発生器(PG‐Tn,PG‐Rm)を有している。パルス発生器(PG‐Tn,PG‐Rm)には信号発生器からクロック信号(TS,RS)が供給され、ここでクロック信号(TS,RS)は共通のデータバス(B)を介して送信ユニット(Tn)および受信ユニット(Rm)へ伝送される。これにより高周波数発振器(HFO‐Tn,HFO‐Rm)の高周波数信号の確定的な位相比が形成される。
さらに上述のセンサ装置の駆動方法では、まず2つのクロック信号が共通のデータバス(B)を介して送信ユニットおよび受信ユニットへ供給される。次に送信ユニットから信号が対象物へ送信される。さらにデータバス(B)を介して受信ユニット(Rm)を通って得られたクロック信号が対象物(O)での反射信号と混合され、ここから評価可能な測定信号が形成される。ここで距離軸線での測定信号のキャリブレーションは共通のデータバスのクロック信号のゼロ点を求めることにより行われる。これによりデータバスを介した2つのクロック信号の位相が比較される。 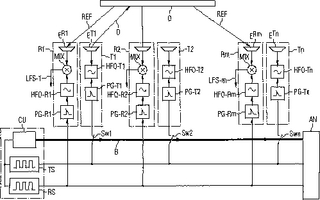 (もっと読む)
(もっと読む)
車両における対象検出方法および対象検出装置
対象検出システムを搭載した車両における対象検出方法および装置であって、対象検出システムは、電磁波を送出して検出領域内の対象で反射された波を受信し、認識された対象で反射され、付加的に車道に沿って延びる対象で反射された波を評価する。この評価は妥当性を評価するものであって、その妥当性の評価においては間接的な対象反射によって直接測定された対象反射が検証される。あるいはその前に検出された対象からもはや反射が測定できない場合に、それ以降の対象検出に間接的な対象反射を利用することにある。 (もっと読む)
車両の衝突を阻止する方法および装置
車両の衝突を阻止するための方法では、まず車両2の周囲状況と車両2の運動量がセンサ2.1,2.2,2.3,2.4,2.5によって検出される。これらのセンサの出力信号から優先交通違反度と衝突危険度が導出される。優先交通違反度と衝突危険度の組合せから危険段階が検出される。それぞれ検出された危険段階に依存して最終的に衝突危険性を低減するためのステップが開始される。 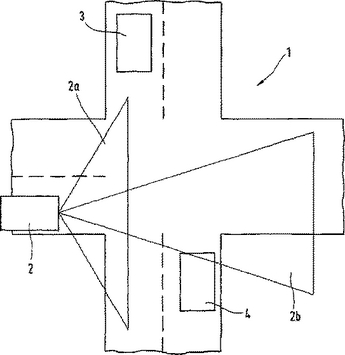 (もっと読む)
(もっと読む)
車両と衝突対象の間の相対速度を突き止める装置
車両と衝突対象の間の相対速度を突き止める装置を提案する。この装置は車両自体内に配置されている。この装置はアクティブな周辺センサシステム(10)とコンタクトセンサシステム(11)を有している。この装置は周辺センサシステム(10)の第1の信号とコンタクトセンサシステム(11)の第2の信号に基づいて相対速度を求める。 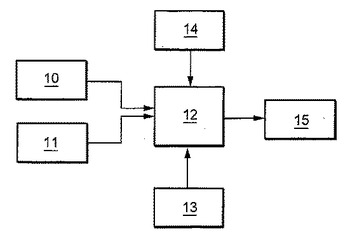 (もっと読む)
(もっと読む)
101 - 112 / 112
[ Back to top ]