
Fターム[5J070BF21]の内容
レーダ方式及びその細部 (42,132) | 衝突防止 (1,451) | レーダデータと他のデータとの結合 (112)
Fターム[5J070BF21]に分類される特許
21 - 40 / 112
対象物検出装置及び対象物検出システム
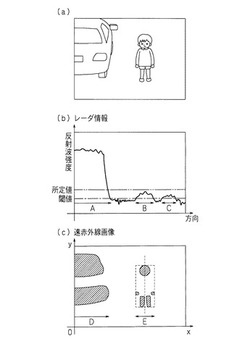
【課題】ミリ波レーダで対象物を検出するに際し、ミリ波の反射波が微弱である人物を、車両又は道路上の他の物体と区別して有効に検出することができる対象物検出装置、及び対象物検出システムを提供する。
【解決手段】ミリ波レーダから、対象物候補の方向(A,B,C)、距離及び反射波強度を取得し、遠赤外線カメラから、画像データを取得して人物候補領域の方向(D,E)を特定し、人物候補領域にて特定した人物候補への方向(E)に反射波強度が所定値よりも低い対象物候補が有るか否かを判断し、対象物候補が有る(Bの方向の対象物候補)と判断した場合、当該対象物候補を人物候補として検出する。
(もっと読む)
物体検出装置

【課題】 レーダによる検出結果と画像処理による検出結果の時間的なずれに起因する誤差の影響を低減し、物体検出精度を向上させることができる物体検出装置を提供する。
【解決手段】 物体検出装置1の物体検出部10は、レーダ検出部により検出された検出点データを参照して画像撮像部12により撮像された画像データを探索して、検出対象物体に対応する画像部分を検出する画像部分探索手段22と、レーダ検出部14により検出された検出点データから検出対象物体に対応する検出点データを抽出する検出点抽出手段24と、検出点抽出手段により抽出された検出点データに合わせて、画像部分探索手段により検出された画像部分の位置を補正する画像部分補正手段26とを有する。
(もっと読む)
車両用警報装置
【課題】 従来よりも適切に安全運転を支援することのできる車両用警報装置を提供すること
【解決手段】 自車両の前方物との距離を検出する車間距離測定器22と、自車両の速度を検出する速度検出手段と、マイクロ波を検出するマイクロ波受信器4を備え、警報手段は、マイクロ波受信器によって所定のマイクロ波が検出された場合にマイクロ波検出警報を報知するマイクロ波警報報知機能と、車間距離測定器で検出された自車両の前方物との距離と速度検出手段によって検出した自車両の速度とに基づき車間警報を報知する車間警報報知機能とを有する。そしてマイクロ波警報報知機能による報知と車間警報報知機能による報知を異なる態様で行うようにした。
(もっと読む)
物体検出装置
【課題】 音波を利用して物体のより精度の高い位置に関する情報を検出することが可能な物体検出装置を提供する。
【解決手段】 フュージョン処理演算部44が、ミリ波レーダ21が検出した物体であるミリ波単独物標と、超音波センサ22が検出した物体である超音波単独物標とが同一物体であるか否かを照合し、ミリ波単独物標と超音波単独物標とが同一物体であると照合したときに、ミリ波単独物標から予測したミリ波予測位置と超音波単独物標とに基づいて、超音波センサ22の検出領域における物体の情報を検出する。これにより、電磁波による検出結果も利用して、超音波によって検出した物体の情報を算出することで、電磁波だけでは検出の困難な至近距離の物体についてもより詳細な情報を検出することが可能となる。
(もっと読む)
物標検出装置
【課題】アンテナ素子数を増加させることなく、静止した複数物標の検出性能を向上させる。
【解決手段】FMCW波の送受信動作を必要なスナップショットの必要数だけ繰り返すと共に、送受信動作毎に、FMCW波の中心周波数を変化させる(S110〜S130)。送受信動作(スナップショットSSi,i=1〜4)毎に、ビート信号データをFFT処理することで周波数スペクトラムを求め、その周波数スペクトラム上でピークとなる対象周波数kのデータx1(k)〜xN(k)を、全受信チャンネルCH1〜CHNから抽出し,配列した受信ベクトルXi(k)を生成し、受信ベクトルXi(k)のそれぞれについて相関行列Rxx_ssi(k)を求める。更に、相関行列Rxx_ssi(k)を、対象周波数k毎に平均(時間平均)した平均相関行列HRxx(k)を算出し、平均相関行列HRxx(k)から求めたMUSICスペクトラムにより、物標が存在する方位を求める(S140〜S180)。
(もっと読む)
車載レーダ装置および電波干渉防止プログラム
【課題】処理負荷を高めることなく電波干渉を防止することが可能な車載レーダ装置、および、電波干渉防止プログラムを提供すること。
【解決手段】電波を対象物に向けて送信する送信手段と、送信手段が送信した電波が対象物で反射された反射電波を受信するための受信手段と、自車両運転者が危険を認知したことを判定するための危険認知判定手段と、自車両運転者が危険を認知したと危険認知判定手段が判定したとき、送信手段からの電波の送信を停止する電波送信停止手段とを備える。
(もっと読む)
物体検出装置
【課題】複数の移動物体が近接している場合であっても、各移動物体との正確な距離を検出する。
【解決手段】物体検出ECU1は、粗決定サーチ関数及び精決定サーチ関数に基づいて、移動物体毎に対応する遅延時間を特定できるか否かの判定を行う時間判定部106と、ステレオカメラ23を介して、複数の移動物体を含む画像を取得する画像取得部108と、遅延時間を特定できないと判定された場合に、取得された画像に基づいて、遅延時間を特定できないと判定された移動物体である特定困難物体に対応する粗決定サーチ関数及び精決定サーチ関数を補正する関数補正部112と、補正された粗決定サーチ関数及び精決定サーチ関数に基づいて、特定困難物体に対応する遅延時間を特定する遅延時間特定部113と、特定された遅延時間に基づいて、特定困難物体との距離を求める距離算出部114と、を備える。
(もっと読む)
衝突予測装置
【課題】 物体との衝突部位の予測精度を向上させることができる衝突予測装置を提供する。
【解決手段】 衝突予測装置は、自車両周辺の障害物を検出すると共に、自車両が走行する道路のカーブ半径を推定し、その推定カーブ半径の微分値を算出する。そして、衝突予測装置は、推定カーブ半径の微分値をR補正係数で補正して推定カーブ半径微分係数を算出し、その推定カーブ半径微分係数を用いて、自車両の部位区間毎に蓄積された衝突確率の積算値を補正する。そして、衝突予測装置は、自車両における障害物との衝突部位を予測し、上記の推定カーブ半径微分係数を用いて、衝突確率の積算上げ幅を設定する。そして、衝突予測装置は、該当する衝突部位における衝突確率の積算値に対して今回の衝突確率を積算上げ幅の分だけ加算し、衝突部位毎の衝突確率の積算値に基づいて、自車両のある部位区間に障害物が衝突するかどうかを判定する。
(もっと読む)
通信装置、通信制御方法および通信制御プログラム
【課題】 通信品質を向上させること。
【解決手段】 ナビゲーション装置は、それぞれが水平方向に互いに異なる角度の指向性を有し、ビームを送信する第1〜第4アンテナ19A〜19Dと、第1〜第4アンテナ19A〜19Dを切り替えてビームを送信させる送信制御部と、を備える。水平方向に互いに異なる角度で4つのビームが送信されるので、複数のビームが側方に存在する反射物で反射するまで距離を異ならせることができ、4つのビームのうち反射回数の少ないビームを交差点に存在する他の車両まで到達させることができる。
(もっと読む)
レーダ監視装置
【課題】レーダ装置による設備への悪影響の発生を抑制する「レーダ監視装置」を提供する。
【解決手段】予めレーダ波の悪影響を受ける設備の周辺に設定したレーダ禁止エリア内に、自動車が進入したならば、レーダ波の射出を停止し、音声出力装置7を介してスピーカ8に「レーダ監視を停止しました。」といった音声案内を出力する。また、レーダ禁止エリア内に、自動車が位置する期間中、レーダの停止中を表現したアイコン312を表示すると共に、地図画像300上に、レーダ禁止エリアが設定されている施設を表すマーク321と、レーダ禁止エリアの範囲322とを表示する(b)。
(もっと読む)
車両用外界認識装置、および、車両システム
【課題】複数の物体が互いに近接している場合でも、これらの物体を高精度で個体認識すること。
【解決手段】車両用外界認識装置100の衝突判定部4は、物体群の左端位置、中心位置、右端位置それぞれについて、両端横速度計算部3で計算される各位置における各横速度をもとに、相対座標系における物体群の移動軌跡を計算し、その移動軌跡が相対座標系における原点に近づくほど各位置における危険度が高いものとして、各位置における危険度を計算し、衝突回避制御部5は、衝突判定部4により計算される物体群の各位置における危険度のうち、少なくとも1つの位置における危険度が所定しきい値を超えるときに、その危険度に対応する物体群に関する衝突回避制御を実行する。
(もっと読む)
車載用レーダ装置、及び車載用レーダ制御方法
【課題】人体に電磁波を照射する可能性が高い場所を車両が走行している場合に、人体への電磁波照射を低減すると共に、車両が当該車両周辺の物体と衝突することを回避することができる車載用レーダ装置を提供する。
【解決手段】車載用レーダ装置であって、自車周辺に電磁波を照射する電磁波照射部と、電磁波を照射することによって自車周辺の物体から反射される反射波を受信する反射波受信部と、反射波に基づいて、自車周辺の物体を検知する電磁波物体検知部と、自車周辺の物体を補助的に検知する物体補助検知部と、所定の場所を自車が走行している状態か否かを判定する走行状態判定部と、所定の場所を自車が走行している状態であると判定したときに、電磁波物体検知部の検知方向と同じ方向の物体補助検知部の検知状態に応じて、電磁波照射部による電磁波の照射を停止、又は照射強度を弱める電磁波照射制御部とを備える。
(もっと読む)
物体検知装置、周辺監視装置、運転支援システムおよび物体検知方法
【課題】様々な物体を高精度に認識することのできる物体検知装置、物体検知方法、またかかる物体検知を用いた周辺監視装置および運転支援システムを提供すること。
【解決手段】物体検知波部10は、カメラ32が撮影した画像に対する画像認識によって物体候補領域を識別し、当該領域に存在する可能性のある物体の種別、方向、距離、角度に基づいてレーダ検知の閾値を設定した閾値マップを作成する。検知処理部16は、レーダ31の反射波強度と閾値マップに示された閾値とを比較して、物体の存在を検知する。
(もっと読む)
レーダ装置、及び方位角検出方法
【課題】異なる周期で動作する画像認識装置からの検出位置を用いて、レーダ装置により物標の方位角を精度良く検出する。
【解決手段】レーダ装置に、前記探索領域の撮影画像に基づいて第1の周期ごとに前記物標の位置を検出する画像認識装置から、当該検出された検出位置が入力される入力手段と、複数の前記入力された検出位置に基づいて、前記第1の周期より短い第2の周期ごとに前記物標の方位角を推定する方位角推定手段と、前記探索領域のうち、前記推定された推定方位角付近では第1の方位角刻み、それ以外の範囲では前記第1の方位角刻みより大きい第2の方位角刻みで前記物標の方位角を検出する方位角検出手段とを備えることで、物標の方位角を精度良く検出できる。
(もっと読む)
車載用レーダ装置、及び車載用レーダ制御方法
【課題】人体に電磁波を照射する可能性が高い場所を車両が走行している場合に、人体への電磁波照射を低減すると共に、車両が当該車両周辺の物体と衝突することを回避することができる車載用レーダ装置を提供する。
【解決手段】車載用レーダ装置であって、自車周辺に電磁波を照射する電磁波照射部と、電磁波を照射することによって自車周辺の物体から反射される反射波を受信する反射波受信部と、反射波受信部が受信した反射波に基づいて、自車周辺の物体を検知する物体検知部と、所定の場所もしくは所定の状態で自車が走行している状態か否かを判定する走行状態判定部と、走行状態判定部が所定の場所もしくは所定の状態で自車が走行している状態であると判定したときに、物体検知部が自車周辺の物体を検知しなかった場合、電磁波照射部による電磁波の照射を停止、又は照射強度を弱める電磁波照射制御部とを備える。
(もっと読む)
先行車検出装置およびこれを用いた車速制御装置
【課題】 先行車の車線変更を検出できる先行車検出装置およびそれを用いた車速制御装置を提供する。
【解決手段】 先行車検出装置100は、先行車の自車両に対する進行角度である背面角度を検出する先行車横位置および車体傾き演算記憶部303と、自車両の直進状態を検出し、自車両の直進中に背面角度が増加後減少した場合、先行車は車線変更したと判定する先行車および走行路判定部302と、を備える。
(もっと読む)
車両用走行安全装置
【課題】複数のレーダ装置を設けた場合に生じる不検知領域に物体が存在すると予測される場合に、接触回避効果を高める。
【解決手段】送受信手段が複数備えられており、回避支援手段は、自車前方の領域であって一の送受信部の検知領域および他の送受信部の検知領域間の不検知領域に外挿部により外挿された制御対象物体が存在する場合には(ステップS14:Yes)、不検知領域以外に外挿部により外挿された制御対象物体が存在する場合の作動内容(ステップS8)よりも、接触回避効果の高い作動内容(ステップS11)を設定する。
(もっと読む)
汚れ判定装置
【課題】レーダセンサのレーダ波受信面の汚れを精度良く判定する汚れ判定装置を提供する。
【解決手段】監視対象周波数領域から抽出した監視対象ピークの電力値を、変調区間毎かつ受信チャンネル毎に算出し、変調区間毎に、電力値が最大となる最大チャンネルに対する各受信チャンネルの電力値の偏差(チャンネル偏差)を算出する(S210〜S250)。算出したチャンネル偏差に従って、各受信チャンネルに対応付けられた前判定値CPをカウントすると共に、車速Vが下限車速Vth以上、かつ受信チャンネルの中に前判定値CPが前判定閾値CPth以上のものが存在する場合に、車速Vに応じて算出される更新値Kにより汚れ判定値CDを更新し、その汚れ判定値CDが汚れ判定閾値CDth以上であれば、レーダ波の受信面に汚れが生じていることを表すダイアグ情報をONにする(S260〜S320)。
(もっと読む)
物体種別判定装置、物体種別判定方法、及び物体種別判定用プログラム
【課題】レーダによる検出結果に基づいて、車両等の物体の種別を適切に判定することができる物体種別判定装置、方法、及び物体種別判定用プログラムを提供する。
【解決手段】物体種別判定装置は、レーダ20により複数の方位角に電磁波を照射し、それぞれの方位角における物体の検出点を取得する検出点取得手段11と、取得された複数の検出点のうち、同一の物体についての検出点であると想定される検出点をグループ化して、点列データとして抽出する点列データ抽出手段12と、抽出された点列データが、方位角が増加又は減少するに従って、検出点のレーダ20からの距離が直線的に減少する第1の状態から直線的に増加する第2の状態に切り替わる変位特性を有するか否かを認識する変位特性認識手段13と、変位特性認識手段による認識結果に応じて、点列データが抽出された物体の種別を判断する種別判断手段14とを備える。
(もっと読む)
物体検出装置及び測距方法
【課題】レーダ受信信号から直接計測することができない遠方に存在する対象物体までの距離を高い精度で演算する物体検出装置を提供する。
【解決手段】
【請求項1】車載のカメラ10の撮像画像の情報に基づいて、測距対象となる対象物体と測距の基準とする基準物体との相対位置関係を算出する物体間相対位置算出部30と、車載のレーダ測距装置20により取得された受信信号に基づいて、測距の基準として選択された基準物体と自車両との間の基準距離を求める基準距離計測部40と、レーダ測距装置20が対象物体までの距離を測距できない場合は、対象物体と基準物体との相対位置関係と自車両から基準物体までの基準距離とに基づいて自車両から対象物体までの距離を演算する距離演算部50とを有する。
(もっと読む)
21 - 40 / 112
[ Back to top ]