
Fターム[5J083AB14]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 用途 (922) | 移動物体検知 (60)
Fターム[5J083AB14]の下位に属するFターム
Fターム[5J083AB14]に分類される特許
1 - 20 / 26
音源検出装置
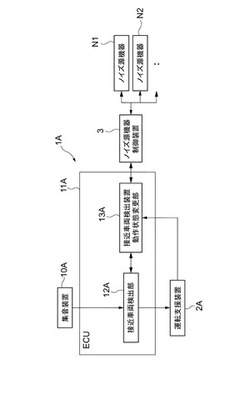
【課題】ノイズ音の影響を抑制する音源検出装置を提供することを課題とする。
【解決手段】移動体(例えば、車両)に搭載され、集音器で集音された音に基づいて検出対象の音源(例えば、他車両の走行音)を検出する音源検出装置1Aであって、音源検出装置が作動されるときに、移動体に備えられるノイズ音の発生源機器の動作状態を制御(例えば、発生源機器を停止/起動、発生源機器の停止条件及び/又は起動条件を変更、発生源機器から発生する音の周波数帯が変わるように動作状態を変更)する動作状態制御手段13Aを備えることを特徴とする。
(もっと読む)
位置推定装置、位置推定方法、プログラムおよび位置推定システム

【課題】屋内にいる利用者の位置推定を精度よくかつ低コストで実現することを可能にする。
【解決手段】位置推定装置は、位置情報と音特性との対応関係を記憶する記憶部110と、集音器による集音結果から判定される音特性に対応する位置情報を前記記憶部から抽出する抽出部150と、固定電話端末に対して区画に設置された機器が発する区画識別音を制御する音制御部120と、利用者端末と通信を行う通信部130と、利用者端末の集音器による集音結果から区画識別音の音特性を判定する判定部140と、を備える。
(もっと読む)
ドップラーレーダーシステム、ドップラーレーダー送信装置及び送信波最適化方法
【課題】本発明は、検出対象物体を容易にかつ精度よく検出するための相関処理に基づくドップラーレーダー送信装置を提供することを目的とする。
【解決手段】本発明は、ドップラーレーダー受信装置において自己相関が算出される検出対象物体からの反射波及び予め定められた参照波の周波数スペクトルが同一となるように、検出対象物体の移動速度のうち検出対象となる移動速度、自己の移動速度及びレーダー波の伝搬速度に基づいて、送信波の周波数スペクトルを調整する可変周波数発振部414及び読み出しアドレス生成部415と、送信波を検出対象物体に照射する送信波照射部と、を備えることを特徴とするドップラーレーダー送信装置である。
(もっと読む)
音源方向検出装置
【課題】複数の音源が発する音の周波数が同一であっても、各音源の方向を適切に検出することができる音源方向検出装置を提供する。
【解決手段】 音源方向検出装置1は、車両の走行音を受ける複数のマイクロホン2と、ECU4とを備えている。ECU4は、各マイクロホン2の出力信号に基づいて、走行音を発する接近車両(音源)の方位分布(方向分布)を表す音源方向分布データを生成するマイクロホンアレー処理部11と、複数フレーム分の音源方向分布データにおいてピークを取る方位の系列を計算する車両方位推定部12と、複数フレーム分の音源方向分布データにおいてピーク値が高い方位の系列に対してクラスタリング処理を行うことにより、複数フレーム分の音源方向分布データにおいてピークを取る方位をクラス毎にグループ化し、当該方位の範囲内からの車両到来の可能性を判断する車両検出部13とを有している。
(もっと読む)
音源方向推定装置
【課題】集音部の位置変化にかかわらず、音源の方向を高精度に推定することができる音源方向推定装置を提供する。
【解決手段】音源方向推定装置1は、音源からの音を受ける複数のマイクロホン2と、各マイクロホン2の移動速度を検出する速度センサ4と、ECU5とを備えている。ECU5は、マイクロホン2Aで受けた音波信号の位相を計算する位相計算部6Aと、移動速度に基づいて、位相計算部6Aにより位相を求めてから各マイクロホン2の位置が変化した時にマイクロホン2Aで受けた音波信号の位相を算出する遅延位相算出部7Aと、遅延位相算出部7Aにより得られた位相と位相計算部6Aにより得られた位相との差(位相差)を算出する位相差算出部8Aと、位相差算出部8Aにより得られた位相差と移動速度とを用いて、音源の方向を算出する音源方向算出部9Aとを有している。
(もっと読む)
位置検出装置、位置検出方法およびプログラム
【課題】被検出部周辺の環境を考慮した被検出部の音速の算出を行い、位置の検出対象とする部分付近の音速をできるだけ正確に測定し、それを用いての位置の検出精度を高める。
【解決手段】ロボットハンド101の先端部分104に超音波送信装置を配置し、さらに先端部分104を含むことが可能な多面体131〜133を設定し、それらの頂点に超音波送受信装置111〜126を配置する。先端部分104の位置検出にあたり、先端部分104に近い頂点を特定点として選択し、この特定点に向かう他の頂点からの経路の音速を算出する。この音速に基づいて、先端部分104から特定点への経路における音速を算出し、この音速の値と、先端部分104と特定点との間における超音波の伝播時間とに基づいて、先端部分104の特定点からの距離を算出する。この距離を複数の特定点について得ることで、先端部分104の位置を特定する。
(もっと読む)
画像ソナー用解析システム、画像ソナー用解析方法、画像ソナー用解析プログラム
【課題】ソナー画像から目標物を正確に識別する。
【解決手段】水上または水面下に位置する目標物の検出用ソナーが、送出した音信号の進行方向に沿って前記反射音レベルの分布解析を行うことにより得られた、前記進行方向の距離に対する反射音レベルの下がった割合が、予め設定された値より大きい領域をエッジ領域として検出するエッジ検出手段と、エッジ領域を端部として含み、且つ反射音レベルが2次元画像データに基づき算出された平均残響レベルより低い領域をシャドウ領域として検出する音圧レベル解析手段とを備えた。
(もっと読む)
目標運動解析方法、目標運動解析装置およびプログラム
【課題】目標運動解析結果が得られていない場合や目標運動解析結果の精度が悪い場合でも、解析収束を加速させるための観測船の運動パターンを指示し、計算負荷を増加させることなく、予測する観測船の運動パターン数を増加させる。
【解決手段】目標運動解析精度を判定し、目標運動解析結果が得られていない場合や目標運動解析結果の精度が悪い場合には、目標体の観測方位および観測方位変化率のみから解析収束を加速させるための観測船の運動パターンを指示し、目標運動解析結果の精度が良好の場合には、微分を用いた最尤法によりフィッシャー情報行列が最大となる観測船の運動パターンを算出する。
(もっと読む)
物体の位置決定
本装置は、予め決められたゾーン内におけるユーザの手の目標部分の位置を決定する。本装置は、位置決定信号を送信する複数のトランスデューサを備える。トランスデューサは、予め決められたゾーン内における手の目標部分の任意の位置に関して、少なくとも2組の送信トランスデューサ及び受信トランスデューサのペアであって、ペアのうちの送信機からユーザの手の目標部分を経由してペアのうちの受信機に至る位置決定信号の合計伝搬時間が所定の点集合に往復する等価な合計伝搬時間より短くなるようなペアが存在するように配置される。上記点集合は、手の目標部分から所定の最小間隔よりも離れているが、本装置の最近接点から手の目標部分の位置までの距離と少なくとも同じ距離だけ本装置の最近接点から離れている、予め決められたゾーン内におけるすべての点を含む。一部の実施形態では、指及び手の混同なしに追跡するために使用可能なチャネルを選択する。  (もっと読む)
(もっと読む)
管制型水中情報収集システム及び水中航走体管制システム
【課題】水中航走体による水中情報の収集効率を低下させることなく、一定の精度で位置検出を行うことができるとともに、また、複数の水中航走体を管制することで、効率よく水中情報を収集すること。
【解決手段】絶対位置取得部10により水上移動体3の絶対位置を取得するとともに、相対位置計測部11により水中航走体4の相対位置を計測し、これらの情報から水中航走体4の絶対位置を検出する。そして、この絶対位置情報を第1通信部13から第2通信部22へ送信することにより、水中航走体4に対して絶対位置情報を通知する。
(もっと読む)
物体の位置管理システム
【課題】 建物空間における高機能化を図る物体の位置管理システムの提供。
【解決手段】位置管理システム1は、建物側の送受信システム2と、物体側の送受信システム11で構成され、建物側の送受信システム2には、LED発光部4、超音波受信機5を有する照明器具材3、LED管理制御部6、超音波センサー制御部7、位置管理制御部8、移動指令制御部9、全体管理制御部10が設けられている。物体側の送受信システム11には、光受光部12、超音波発信機13が設けられている。LED管理制御部6からの制御信号でLED発光部4を駆動し、照明光を出力させると共に、位置管理の対象とする物体に制御信号を送信する。
(もっと読む)
目標状態量推定方法
【課題】目標がマニューバを開始してから終了するまでの時間がかかるような場合でも、マニューバ終了後の次ステップにおける推定誤差を低減することのできる目標状態量推定方法を得る。
【解決手段】マニューバが検出された際には、マニューバ開始時刻およびマニューバ終了時刻を検出するステップと、マニューバ開始時刻における目標の推定状態量とその推定情報行列を、マニューバ終了時刻における目標の推定状態量とその推定情報行列に変換する変換ステップと、変換ステップで変換した目標の推定状態量とその推定情報行列に基づき構成した評価関数を最小化する状態量を求めることにより、目標の状態量を推定するステップと、を実行する。
(もっと読む)
音と位置の測定
可聴および超音波周波数の両方にわたる周波数応答を持つセンサと、可聴および超音波入力周波数を個別に使用するために分離するように構成された処理用電子機器とを含む、可聴および超音波音入力の両方を処理するように構成された装置。可聴および超音波周波数の両方にわたる周波数応答を持つセンサと、可聴および超音波入力周波数の各々を独立して処理するように構成された処理用電子機器とを含む、可聴および超音波音入力の両方を処理するように構成された装置。 (もっと読む)
目標自動検出処理方法および装置
【課題】目標からの反響信号の認識率を確保した上で、ノイズ信号に対する誤警報率を低下させて、トータルとしての自動目標検出性能を向上させる。
【解決手段】認識率向上のために受信信号から生成したスペクトルパターンの重心補正処理を行う前に、重心補正の要否を判定する処理を追加し、本来重心補正が必要ないデータに対しては重心補正しないようにする。重心補正の要否はスペクトルレベルの分布度合いを考慮して決定する。そのため、送信信号と相関のある領域内を指定範囲として事前設定しておき、目標からの反響音の可能性のある信号は指定範囲内に沿った形で高スペクトルレベルを持つが、ノイズ信号は指定範囲内に添う形で高スペクトルレベルが分布しないことに着目して、この指定範囲内でスペクトルレベルのヒストグラムを作成し、あるレベル以上のスペクトル分布の合計値が閾値を越えるかどうかで重心補正の要否を判定する。
(もっと読む)
移動物体検出装置
【課題】僅かしか移動しない物体でも検出できる移動物体検出装置を提供する。
【解決手段】二次元直交座標系において原点を始点とし一対のドップラー信号E,E’の振幅レベルの値Xn,Ynを終点とするベクトルRnが時間の経過に伴って回転するときの回転角φnを求めてこれを積算する。さらに回転角φnの積算値を閾値回路88にて所定の閾値と比較し、積算値が閾値を越えたときに検出信号を送出する。従来例のように一対のドップラー信号E,E’を2値化する際に欠落してしまう情報を含めてドップラー信号E,E’の変化を詳細に調べることができるから、従来例では検出し得なかったような僅かしか移動しない物体、例えば、同一象限内に留まる程度の移動しかしない物体Oでも検出することができる。
(もっと読む)
水中測位システムおよび水中測位方法
【課題】SBL方式の双曲線航法で測位対象物の測位を精度良く行う。
【解決手段】測位対象物に設けられたピンガ5から発せられた音響信号を含む音響信号をハイドロフォン1〜4で受信してAD変換器10でデジタル信号に変換(入力信号)する。入力信号は直交検波、デシメーション、帯域制限の各処理が施される。信号検出部20は、各処理の施された入力信号にピンガ5から発信された音響信号に対応するデジタル信号が含まれるか否かを検出する。これが検出された場合に、到達時間差算出部24が、相異なる入力信号間でラグ値ごとに相関関数演算を行い、この演算結果のピーク値を与えたラグ値から、相異なる2個のハイドロフォンによって受信したピンガ5からの音響信号の到達時間差を求める。この到達時間差を用いてピンガの位置が特定される。
(もっと読む)
超音波式3次元位置計測装置
【課題】
複数の超音波発信器の各3次元位置を求める処理を行う超音波式3次元位置計測装置を提供する。
【解決手段】
各超音波受信器が得た距離情報の数を調べて信号を発信した超音波発信器の個数と同じ数の距離情報を持つものの中から3個の受信器を選択し、選択した3個の超音波受信器の距離情報より行列の各行として1つの超音波受信器が受信した順に距離情報を並べた距離行列を作成し、作成した距離行列の各行について要素を入れ替えることで第2の距離行列を作成する。第2の距離行列の各列の距離の組み合わせに対して同じ発信器からの距離情報として仮定して当該発信器の3次元位置を計算し、選択した3個の受信器以外の受信器の距離情報を用いて、3次元位置を評価し、この処理を繰り返し全ての組み合わせの評価値を得て、その中の最小の評価値を与えた3次元位置を3次元位置推定値として出力する。
(もっと読む)
位置検出システム
【課題】建物内の床面と天井面との間の既知距離を用いることで、誤差を考慮して位置を検出することにより求めた位置の信頼性を高める。
【解決手段】送信装置1は、建物内で床面上を移動する移動体に搭載され、疎密波を間欠的に送波する疎密波送波部11を備える。受信装置2は、天井面の定位置に設置され、疎密波を受波する疎密波受波部21を備える。位置演算部24は、疎密波受波部21で受波した疎密波の到来方向を求め、さらに到来方向の誤差範囲から送信装置1が移動する平面内での送信装置1の位置の誤差範囲を求める。送信装置1の位置の誤差範囲の中心座標を送信装置1の座標位置として求め、さらに、誤差範囲の中で当該座標位置からの最大距離を最大誤差として求める。
(もっと読む)
アクテイブタグ装置
【課題】発信手段の方向および発信手段と受信手段の距離を精度良く検知する。
【解決手段】発信手段1の指向性アンテナの方向31に対向して受信手段2の指向性アンテナ21a,21bを向け、アンテナ21a,21bを切替えた時に受信した高周波信号のタイミング又は振幅又は周波数又は位相又はこれらの組合わせを検知し、発信手段1の方向や発信手段1と受信手段2の距離を検知する。その際、受信手段2の受信器で抽出した信号の少なくとも1サイクル分を単位として基準発振器に同期したサンプリング周波数でデジタル信号に変換し、このデジタル信号と、SinおよびCosのルックアップテーブルとの積和演算を行うが、そのときの−1の乗算はデジタル信号の補数を求めることにより行う。
(もっと読む)
空間を監視するための方法及びその方法を実行するための装置
空間を測量するための本発明による方法は、空間の音響特性が決定され、空間の音響特性の変更が検出され、変更が設定基準と比較され、及び設定基準が満たされる時、アクションが引起されることで特徴付けられる。空間の伝達関数が、適応型プロセスを用いて音響特性として推定される。変更が、推定された伝達関数の変更に相当する。エラー信号が、実際の出力信号と推定された出力信号とから生成され、推定された伝達関数の変更は、エラー信号の結果として実行される。空間の音響特性が継続的に決定される。  (もっと読む)
(もっと読む)
1 - 20 / 26
[ Back to top ]