
Fターム[5J083AE06]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 測定対象 (1,034) | 面(壁面、液面、地面、海面等) (249)
Fターム[5J083AE06]に分類される特許
141 - 160 / 249
少なくとも2個のインパクトの位置を決定するための方法
【課題】1個以上のセンサーを使用して、表面上の少なくとも2個のインパクトの位置を決定するための方法。
【解決手段】インパクトF1とF2は1個以上のセンサーによって検知される信号を発生し、各センサーは検知信号si(t)、i=1〜n(nはセンサーの数)を供給する。振幅の異なる同時のインパクトを決定できるために、上記方法は、1個のインパクトの位置xを特定するステップと、各々の検知信号si(t)と位置jにおける基準インパクトRjに対応する所定の基準信号rij(t)の比較、特に相関に基づく、上記特定されたインパクトによる寄与分が減少される各センサーの修正検知信号si’(t)を決定するステップとを有する。また、検知信号のカップルに基づいた方法と装置に関係する。
(もっと読む)
車両用周辺監視装置

【課題】低速走行時に、自車両の運転者に、自車両の周囲の物体に関する情報をより有効に与える車両用周辺監視装置を提供する。
【解決手段】監視距離が遠くなるに従い監視角度が狭くなる距離測定部24a〜24dを備えた車両用周辺監視装置10において、検知領域変更部18は、車速検出部17が検出した自車両の車速が閾値以下であるときに、注視方向判定部16が検出した運転者Dの視線方向については、距離測定部24a〜24dの監視角度を自車両の車速が閾値を超えるときに比べて広くするため、駐車時等の低速走行時において、運転者Dが凝視しているバンパーの角やホイール周辺については、より広い監視角度が得られることになり、運転者Dはバンパーやホイールが全体として壁等と接触するか否かが判るため、低速走行時に自車両の運転者Dに自車両の周囲の物体に関する情報をより有効に与えることができる。
(もっと読む)
超音波センサ

【課題】 被検出体に対し超音波を発信する発信素子と、被検出体にて反射された超音波を受信する複数の受信素子と備えた超音波センサにおいて、ドップラー効果を抑制することができるとともに、体格を小さくすることが可能な超音波センサを実現する。
【解決手段】 超音波センサ10は、基準受信素子13qの受信信号を同期する位相同期回路22と、受信素子13p、13sを同期検波し、被検出体が存在する方向を示す位相差情報を取得する位相差情報用同期検波回路24、25とを備えている。受信素子の1つを基準とした基準受信素子13qを設け、同期検波するため、ドップラー効果による影響を抑制することができるとともに、基準を他に設けて個々に受信素子の受信信号を同期検波する場合に比べて、回路素子18を小型化することができる。
(もっと読む)
超音波変位センサ装置
【課題】本来検出すべき測定対象物以外の障害物の影響をより確実に避けることが出来ると共に、本来検出すべき測定対象物までの間隔或いは距離を安定して検出することが可能な、検出及び/又は測距性能に優れた超音波センサを提供する。
【解決手段】超音波振動子と信号処理装置とからなる超音波変位センサ装置であって、上記信号処理装置が、i)一周期内に発生した全ての反射信号を取り込んだ上で、その周期内最後尾の反射信号を抽出し、ii)上記最後尾の反射信号を測定対象物からの反射信号と判定し、iii)当該判定された上記最後尾の反射信号に基づいて、投音時点から超音波振動子に反射音が返って来る時点までの時間を検出し、これにより、センサ本体から測定対象物までの間隔或いは距離を検出或いは測定する構成を備えたものとする。
(もっと読む)
アクティブソーナー装置およびアクティブソーナー装置による残響除去方法
【課題】オペレーターにとって簡単な方法で、不要なエコー信号を除去する範囲を指定する。
【解決手段】本発明のアクティブソーナー装置は、送波器と、前記送波器から送波された音波の反射波を受波信号として受波する受波器と、を有してなるアクティブソーナー装置であって、地図上に作図された、前記音波の反射が起きやすい地形が海底に存在する海域を、検出除去海域として設定する作図処理部と、前記受波器で受波された受波信号からエコー信号を検出し、検出したエコー信号のうち、前記検出除去海域にて反射したエコー信号を残響として除去する残響除去部と、を有することを特徴とする。
(もっと読む)
水中音源装置
【課題】油圧系への気体の浸入を防止する水中音源装置を提供する。
【解決手段】内部気圧を外部水圧と均衡させるための内部気圧調節手段8と、動作油タンク9内の動作油圧を外部水圧と均衡させるための油圧均圧装置10と、シリンダ6のピストン通路11のシリンダ室側に配置された内側シール部材12と、ピストン通路11の開口部側に配置された外側シール部材13と、シール部材12,13間から動作油タンク9に至るドレン回路14と、シール部材12,13間の動作油圧がエンクロージャ2の内部気圧よりも高いときのみドレン回路14を開通させるドレン規制弁15とを備えた。
(もっと読む)
超音波センサを有する流体取扱装置ならびに当該装置を用いる方法およびシステム
流体を流体源(140)から採取するよう構成される採取プローブ(120)と、採取プローブ(120)に結合され、超音波エネルギを送るとともに受けるよう構成される超音波センサ(160)とを含み、超音波センサ(160)はさらに、流体の流体表面からの反射される超音波エネルギを受けることにより第1の信号を生成するように構成される装置が提供される。流体取扱装置を用いる流体取扱システムならびに当該装置およびシステムを用いる方法も開示される。 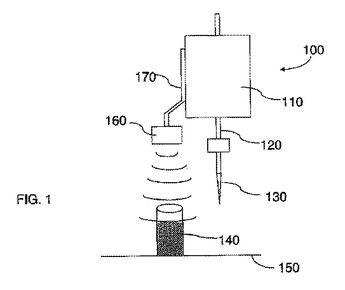 (もっと読む)
(もっと読む)
障害物検知センサ搭載シミュレーション装置、障害物検知センサ搭載シミュレーション方法及び障害物検知センサ搭載シミュレーションプログラム
【課題】障害物検出センサ搭載シミュレーション装置において、実際に車両に障害物検知センサを搭載する前に、障害物検知センサの配置状態の良否を判断可能とするための手段を提供することである。
【解決手段】障害物検知センサ搭載シミュレーション装置10は、データ取得手段20と、模擬物体配置手段26と、表示手段32と、ディスプレイ16とを備える。データ取得手段20は、障害物検知センサであるソナーの位置及び検知エリアを表すセンサデータと、輪止め模擬体の形状及び寸法を表す模擬物体データとを取得する。模擬物体配置手段26は、仮想三次元空間上に、ソナーに対する位置及び方向が予め設定された関係にあるように、輪止め模擬体を配置する。表示手段32は、仮想三次元空間上に検知エリアを表す検知エリア形状と輪止め模擬体とを配置した画像を、ディスプレイ16に表示させる。
(もっと読む)
魚群探知機
【課題】魚探画面において、魚群と水底の堆積層の詳細な状態を同時に把握することは困難だった。
【解決手段】対象を探知する探知信号を送信し、反射信号を受信する送受信部と、反射信号に基づいて水深または水底を検出する検出部と、反射信号を可視化する際、反射信号のうち、水深または水底を基準としてユーザからの設定により定まる境界の上方の反射信号からユーザからの設定による第一の感度で第一の対象を選別可能とし、境界の下方の反射信号から第一の感度とは異なるユーザからの設定による第二の感度で第二の対象を選別可能とし、表示処理部は、境界の上方を一つの探知画像の第一表示領域に表示させ、境界の下方を一つの探知画像の第一表示領域より下方の第二表示領域に表示させる魚群探知機とする。
(もっと読む)
通信装置
【課題】IDを短時間で設定することができる通信装置を提供すること。
【解決手段】ECU10と車内LANで接続される障害物検知センサ20〜50は、後側バンパー100への複数の取り付け態様と、ECU10と通信する際に用いる複数のIDとが対応付けられたIDテーブルが記憶されたメモリ20b1、後側バンパー100への取り付け態様(回転角度)を検出するGセンサ10lなどを備え、回転角度が330度〜30度の場合は自IDに1を設定し(S10、S11)、回転角度が60度〜120度の場合は自IDに2を設定し(S12、S13)、回転角度が150度〜210度の場合は自IDに3を設定し(S14、S15)、回転角度が240度〜300度度の場合は自IDに4を設定する(S16)。
(もっと読む)
ソーナー探知情報処理装置
【課題】ソーナーを曳航する回転翼航空機で海底の目標を探知した際に、機上にてその深度情報を含む目標の位置情報を取得することのできるソーナー探知情報処理装置を得る。
【解決手段】深度情報を含む海底地図データベースを機上に有し、航法データや曳航情報等に基づき航空機から曳航されるソーナーの実座標での位置情報を算出・更新しながら、このソーナーで受信したソーナービデオ信号をその実捜索幅及び実捜索長を直交2軸とした2次元画面に表示する。そして、目標を探知した際は、この表示画面上で指定される目標位置を表示座標系から実座標系に変換し、実座標系の目標位置としての緯度・経度を算出するとともに、機上に搭載した海底地図データベースを検索してこの目標位置の海底深度を取得する。
(もっと読む)
超音波センサ
【課題】残響を低減できる超音波センサを提供する。
【解決手段】振動部材としての筐体の底面部の内面に、電気信号を振動に変換し、振動を電気信号に変換することで、底面部を介して超音波を送受信する送受信兼用の超音波素子が固定された超音波センサにおいて、超音波素子の表面のうち、振動部材との接触部位を除く部位の少なくとも一部に接触するように、制振材を筐体内に配置した。
(もっと読む)
超音波センサ
【課題】送波又は受波方向から見た大きさを小さくでき、且つ筐体強度も強くできるようにする。
【解決手段】超音波センサ1は、センサ本体2と、圧電振動子3とを備えている。センサ本体2は、筐体4と、軸部5と、面部6とを一体に有する。筐体4は円筒有底形態をなし、底部4aの内面に前記圧電振動子3を面接触状態で接着により取り付けている。前記軸部5は、前記底部4aより幅小(径小)な円柱状をなしており、面部6外面から前記圧電振動子3と反対方向に延出する形態に形成されている。前記面部6は、前記軸部5の先端部に形成されている。この面部6は超音波を送波又は受波するものである。
(もっと読む)
超音波センサ
【課題】 近距離の障害物を検出することができる超音波センサを実現する。
【解決手段】 超音波センサ10は、車両前方に超音波を送信する送信素子11と、障害物で反射された超音波を検出する受信素子12と、送信素子11から送信された超音波を反射して進行方向を変更する反射部材13と、を備えている。反射部材13は、金属、硬質樹脂など超音波を効率よく反射することができる材料により形成され、送信素子11の外周部11bに設けられている。超音波センサ10は、反射部材13により送信可能領域Tを超音波センサ10に近づけた送信可能領域T1に変更することができるため、送信可能領域T1と受信可能領域Rとを超音波センサ10に近い領域で重ねることができるので、反射部材13を備えていない場合に検出可能な領域よりも、近くに存在する障害物M2を検出することができる。
(もっと読む)
超音波センサ装置
【課題】自車両付近の人間や壁などの障害物を検知して運転者にその情報を知らせる車両用超音波信号処理装置は既に広く知られている。しかし従来の装置では部品構成が多く専門的な装着技術が必要であった。
そのため装着に時間がかかり装着にコストが発生した。
【解決手段】電源の配策が不要でコントロールユニット、インジケーター、ブザーの装着が不要となる為、超音波センサ装置の装着において専門的な技術が不要となり誰でも容易に装脱着することが可能になる。
(もっと読む)
超音波センサ
【課題】 音響整合層を備え、超音波の検出感度の高い超音波センサを実現する。
【解決手段】 超音波センサ10を、バンパ20のように音響整合部材12と音響的性質が近似した部材に取り付けた場合でも、超音波センサ10が、取付部20aと音響整合部材12との間に介在され、バンパ20から音響整合部材12への振動の伝達を減衰させる振動減衰部材13を備えているので、超音波がバンパ20から音響整合部材12に伝達されてノイズの原因となることを防止することができる。これにより、超音波のノイズを低減することができるので、超音波の検出感度を向上させることができ、超音波の検出感度の高い超音波センサ10を実現することができる。
(もっと読む)
障害物検出装置
【課題】近距離にある障害物であっても遠距離にある障害物であっても適切に検出可能な障害物検出装置を提供すること。
【解決手段】障害物検出装置が備える超音波センサは、ECUからの指令に応じて送波周波数および送波出力を変更可能で、これにより、指向性が高くて検出距離が長距離となる遠距離モードと指向性が低くて検出距離が短距離となる近距離モードとを切り替えて、障害物の検出エリアを変更することができる。検出エリアを変更する際には、例えば、車速Vが所定の閾値V2以下の場合には(S420:NO)、近距離モードとされ(S425)、これにより、車両近傍の不感帯を減少させることができる。一方、車速Vが所定の閾値V2より大の場合には(S420:YES)、遠距離モードとされ、これにより、より遠方の障害物を精度良く検出できるようになる。
(もっと読む)
値の比に基づくタッチイベントの検出方法と検出システム
【課題】改善された音響指紋及び一致アルゴリズム、並びに屈曲波タッチシステムに用いるための誤った信号データの改善された識別方法を提供する。
【解決手段】
タッチパネル上のタッチイベントを検出するための方法は、少なくとも2つのセンサから、タッチイベントに応答する少なくとも第1及び第2の信号を取得することを含む。上記第1の信号に関連づけられる第1の振幅値が計算され、上記第2の信号に関連づけられる第2の振幅値が計算される。上記第1及び第2の振幅値間の値の比が決定され、上記値の比に基づいてタッチ位置が識別される。
(もっと読む)
距離測定装置および走行体位置検出システム
【課題】 床下点検システム等に用いられるロボットの位置検出を正確に行えるようにする。
【解決手段】
ロボット10は、遠隔制御される走行体11と、走行体11に回動可能に搭載されたカメラアッセンブリ30を備えている。このカメラアッセンブリ30のカメラ34は水平方向と上下方向に回動できる。カメラ34には超音波距離計40が設けられており、カメラ34と一緒に回動できるようになっている。床下空間において、上記超音波距離計40が上下方向に回動され、上下回動範囲での計測距離の最大値が、布基礎壁面100aまでの実際の距離として決定される。さらに、超音波距離計40の水平回動に伴って求めた複数方向での布基礎壁面100aまでの実際の距離に基づき、ロボット10の現在位置を演算する。
(もっと読む)
底質判別装置および底質判別方法
【課題】海底深度の深浅の影響を受けることなく海底の底質を判別することのできる底質判別装置および底質判別方法を提供する。
【解決手段】振動子1は海底深度に比例するパルス幅の送信パルスを海底に向けて送信する。このパルス幅は、深度算出部7が海底エコー信号から算出した海底深度に基づいて、送信パルス幅算出部8が算出する。振幅データ抽出部9では、海底エコー信号の所定範囲から海底深度に比例する時間間隔で振幅データが抽出される。この振幅データは、ゲイン補正部9でTVG処理され、正規化部12で正規化される。さらに、正規化後の振幅データの系列における複数個の区間(セグメント)ごとに特徴量が特徴量算出部13で算出され、この特徴量に基づいてニューラルネットワーク14が底質判別情報を生成する。底質判別情報は、判別対象の底質と複数の底質種別(岩や石など)との類似度をそれぞれ表す数値からなる。
(もっと読む)
141 - 160 / 249
[ Back to top ]