
Fターム[5J083AE06]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 測定対象 (1,034) | 面(壁面、液面、地面、海面等) (249)
Fターム[5J083AE06]に分類される特許
201 - 220 / 249
超音波センサ装置
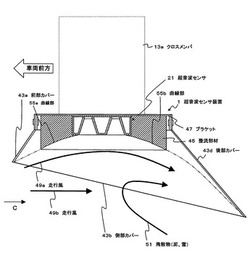
【課題】路面からの跳ねた泥や雪などの飛散物が装置に付着しないような超音波センサ装置を提供する。
【解決手段】超音波センサ装置1はブラケット47を有し、ブラケット47の下面には超音波センサ21が取り付けられている。
また、ブラケット47には前部カバー43a、側部カバー43b、43c、後部カバー43dが設けられている。
超音波センサ21の周囲には整流部材45が設けられている。
整流部材45を設けることにより、走行風49aが整流部材45の形状に沿って整流され、巻き返しを起すことなく流れる。
従って、路面からの飛散物(泥、雪)51は走行風49aによって進路を妨げられ、超音波センサ21に付着することはない。
(もっと読む)
傾斜計測装置および傾斜角度算出方法

【課題】路面の傾斜角度を精度よく測定することができる傾斜計測装置を提供する。
【解決手段】超音波信号を送信装置3で路面に向けて送信し、超音波信号の反射信号を受信装置4で受信する。制御部5Aにおいて反射信号の強度を測定し、超音波信号を送信してから反射信号の強度が所定値以下になる時間を測定する。そして、反射信号の強度が所定値以下になるまでに超音波信号が届いた最長距離を算出し、最長時間に基づいて路面の傾斜角度を測定する。
(もっと読む)
自律移動装置及び平面状障害物認識方法
【課題】自律移動装置において、平面状障害物の位置を容易に認識可能とし、自己位置を特定して、効率的で安全な自律走行を可能とする。
【解決手段】レーザビームを用いて水平面内をスキャンし、反射波を受信して複数のスキャンポイントの座標を取得し、得られた順番が時系列的に前後する2つのスキャンポイントについて、前のスキャンポイントを始点とし後のスキャンポイントを終点とする要素ベクトルを形成し、時系列的に前後し、かつ互いに連続する複数の要素ベクトルであって、要素ベクトルの長さがそれぞれ第1所定長以下であり、振れ角度が第1所定角度以下であり、振れ角度の積算値が第2所定角度以下であるものを選択し、ベクトル合成して1つのスキャンセグメントベクトルし、スキャンセグメントベクトルの始点と終点により定義される線分が第2所定長以上であるときに、そのスキャンセグメントベクトルに沿って平面状障害物が存在していると認識する。
(もっと読む)
物体認識装置
【課題】少ない演算量で、被検出対象のデータが混在しても安定して物体の形状を認識することができる物体認識装置を提供する。
【解決手段】物体検出手段1によって検出された表面形状情報に基づいて物体の輪郭形状を認識する形状認識手段2を備えた物体認識装置であって、下記特徴を有する。形状認識手段2は、最大で規定回数分、表面形状情報を構成する標本群から任意の標本を抽出し、抽出された標本に基づいて形状モデルを定める形状モデル設定手段3と、標本群に対する各形状モデルの適合度を演算する適合度演算手段4と、形状モデルに対する適合度に基づいて輪郭形状となる形状モデルを決定する輪郭形状決定手段5と、を備える。輪郭形状決定手段5は、第一基準値以上の適合度が存在する場合は、規定回数に拘らず最先に第一基準値以上となった適合度を有する形状モデルを輪郭形状として決定する。
(もっと読む)
物体認識装置
【課題】少ない演算量で、被検出対象のデータが混在しても安定して物体の形状を認識することができる物体認識装置を提供する。
【解決手段】物体認識装置は、物体検出手段1が検出した表面形状情報に基づいて物体の輪郭形状を認識する形状認識手段2を備える。形状認識手段2は、規定回数分、表面形状情報を構成する標本群から任意の標本を抽出し、形状モデルを定める形状モデル設定手段3と、各形状モデルに対して一致しない標本の不一致数をカウントして、標本群に対する各形状モデルの適合性を演算する適合性演算手段4と、最も小さい不一致数を有する形状モデルを、最も適合性が高いと判定し、輪郭形状として決定する輪郭形状決定手段5と、を備える。適合性演算手段4は、カウント途上で不一致数が許容限度である第一基準値に達した場合には、当該形状モデルに対する不一致数のカウントを終了する。
(もっと読む)
海底検出方法および魚群探知装置
【課題】所定深度毎にその深度での海底検出レベルを演算し、この海底検出レベルを移動することにより海底を検出する方法および装置を提供することにある。また、この海底検出レベルを、海底反射を含む反射信号が横切る深度を記憶し、当該反射信号が検出レベルを上回る場合、当該反射信号の最大値と海底検出レベルとの差を所定の範囲とすることにより、安定して海底を検出する方法および装置を提供することにある。
【解決手段】海底を検出する方法において、所定深度毎に海底検出レベルを演算し、受信機で増幅検波した反射信号を所定深度毎に演算した海底検出レベルと比較し、比較の結果により演算した海底検出レベルを移動することを特徴とする。
(もっと読む)
超音波式積雪センサーおよびそれを用いた融雪装置
【課題】 積もった雪の質の影響による誤検出を回避して、積雪を高い信頼性で検出することが出来る、融雪装置に用いて好適な超音波式積雪センサーを提供すること。
【解決手段】 積雪がない状況下での基準距離に比して、測定距離が小さくなった場合に積雪があると判定する第一の積雪判断手段に加えて、測定距離が大きくなった場合に積雪があると判定する第二の積雪判断手段を採用し、更に積雪判定を一層安定化させるために、超音波の受波信号レベルの認識下限を設定して小さなレベルの受波信号を考慮しないようにする受波フィルタ手段を採用した。
(もっと読む)
水中受波アレイ用受波素子の感度比試験装置又は試験方法
【課題】 受波感度と加速度感度の両方の測定を試験室内の大気中において行い、かつ、計測環境と計測条件の同一化と加速度感度と受波感度の測定を共通周波数領域において実施可能とする。
【解決手段】 内空部に受波素子11を支持する密閉構造の音響容器14と、音響容器14内に設けられる駆動音源26及び音圧センサ20と、音響容器14を振動させる加振手段と、加速度センサ23と、を具備し、音圧センサ20と受波素子11との出力電圧の比較演算により受波素子11の受波感度を得、加振手段による加振時の加速度センサ23と受波素子11との出力電圧の比較演算により受波素子11の加速度感度を得る。これにより受波素子11の受波感度の加速度感度に対する感度比を測定する。
(もっと読む)
ゲイン制御回路
【課題】 AGC処理を行う結果、応答性が低くなる。
【解決手段】 エコー信号のレベル差を低減するために、前記エコー信号をA/D変換してメモリに記憶する。そのメモリから読み出したデータ D(i)に対して、前記データ D(i)を中心に含む区間のデータ( D(i-n)〜D(i)〜D(i+n) )から移動平均値 Ave(i)を演算し、前記移動平均値 Ave(i)から、AGCゲイン G(i)を算出し、前記データ D(i)に対し、AGCゲイン G(i)を乗算してAGC処理を行う。
(もっと読む)
河川データ測定方法及び装置
【課題】 測定装置を搭載した浮揚体の移動量の計測精度低下を防ぐ。
【解決手段】 超音波送受信器301から河底方向に所定の時間間隔で超音波を発信し、河底で散乱・反射された超音波を2次元状に配置された2次元超音波検出器303で受信し、超音波送受信器301から時間をおいて発信された2回の超音波それぞれに対応する2次元超音波検出器303の出力に基づいて河底からの反射波の強度分布と位相分布を信号処理装置304で求め、信号解析装置305で、信号処理装置304から出力される二つの強度分布と位相分布それぞれの間の相関の強度を、前記2つの強度分布、位相分布のうち、先に発信された超音波に対応するものを他方に近づけつつ移動距離の関数として求め、相関の強度が最大となる移動距離及びそのときの移動方向を前記2回の超音波発信の間の測定装置の移動距離及び移動方向とする。
(もっと読む)
車両用運転支援装置
【課題】走行路面上に段差が存在する場合でも段差への進入時の衝撃が比較的小さくて済む場合には不必要に運転支援することなく運転者に煩わしさを与えない適切な運転支援を行うことができる運転支援装置を提供する。
【解決手段】車両が走行する路面と車両との距離を測定する測距センサ部と、前記測距センサ部によって測定された距離値に基づいて、路面の段差及び段差の形状を検出する段差検出手段と、運転者に対して警報を発する警報部と、前記段差検出部において検出された段差の形状に基づいて、検出した段差に前記車両の車輪が進入した際に生じる衝撃の程度を推定すると共に、前記推定された衝撃の程度に基づいて前記警報部から警報を出力するか否かを判断する警報出力判断部と、を備えることを特徴とする車両用運転支援装置。
(もっと読む)
障害物検出装置
【課題】車両周辺の障害物の位置・形状及びスペースを広範囲かつ正確に検出すること。
【解決手段】アレイ状に配置された素子から送信波を送信し、障害物での反射波を各素子で受信する。その受信信号を受信した時間から障害物の距離を算出し、各素子の受信信号の位相差から障害物の方向を算出する。また、広範囲で障害物を検出するために、各素子に入力する送信信号の位相差を適宜変えて、送信波の合成指向性を制御するとともに、各素子の受信信号に乗算する係数を適宜変えて、受信波の合成指向性を制御する。特に、隣接素子間に位相差を同相、逆相交互に設定することで、指向性を狭角、広角と交互に切り替え、広範囲の障害物の位置検出を可能とする。さらに、移動しながら検出した位置情報から、車両走行経路周辺の障害物の位置・形状及びスペースの認識を可能とする。
(もっと読む)
情報収集システム
【課題】 コン柱に張られた電線の弛度に関して、高い確度で異常発生を通報することのできる、情報収集システムを得ることを目的とする。
【解決手段】 地面との距離に応じた信号を出力する超音波センサと、当該超音波センサの出力情報及び自己の識別情報を送信する無線通信部とを有し、コン柱に付設されたセンサノードと、
上記センサノードから送信される伝送情報を収集し、収集した情報を、当該センサノードとは通信プロトコルの異なる他の通信ネットワークに伝送するゲートウェイサーバとを備え、各センサノードが、自己の通信可能距離内に存在する他のコン柱に搭載されたセンサノードとの間で、無線アドホックネットワークを構成するようにした。
(もっと読む)
フラツシャー型魚群探知機
【課題】 スリップリングとブラシの摩耗により寿命が短く、スリップリングとブラシの接触抵抗によって発光体5の輝度が変化するため、その変化が大きいときには、水中の魚群や海底と見間違えるという問題がある。
【解決手段】 ケース12の前面に表示板13が装着され、ケース12にモータ14が固着され、モータ14の回転軸14aに導光体15の固着部15aが固着され、導光体15は固着部15aからモータ14の回転軸14aと同方向に伸び、表示板13の前面で表示板13に沿って伸び、表示板13の端部で直角方向に伸びて、導光体15の端部の発光部15bが表示板13のスリット13aに対面するように装着され、導光体15の対向する方向にバランサ16が固着され、導光体15の固着部15aの近傍に発光素子17が2個対向して装着され、発光素子17に入力装置18が接続され、入力装置18に送受信装置19が接続されている。
(もっと読む)
潮流測定装置及び潮流測定方法
【課題】対地速度と対水速度の差から潮流を測定する潮流測定装置において、船体の動揺に起因する超音波信号の送波時と受波時における船体位置の相違を潮流測定演算時に補正し、動揺誤差を是正した正確な潮流測定を行うことができる潮流測定装置を提供する。
【解決手段】 GPS受信機4を用いて測定した超音波信号の送信時、対水信号周波数の測定時、及び対地信号周波数の測定時における正確な対地船体速度を用いて、対水信号周波数から算出される対水速度、及び対地信号周波数から算出される対地速度の動揺誤差を補正する。これにより、船体の動揺が潮流測定に与える影響を防ぎ、正確な潮流を得ることが可能になる。
(もっと読む)
乗員保護装置、乗員保護方法および乗員保護装置付き車両
【課題】 衝突対象に応じた乗員保護を行うことが可能な乗員保護装置を提供する。
【解決手段】 乗員保護装置1は、車外に向けて超音波を発信し、車外対象物にて反射して戻ってくる反射波を受信する。そして、乗員保護装置1は、受信した反射波の特性から、車外対象物の種類を判別する。このとき、乗員保護装置1は、反射波の波形の積分値及びひずみの少なくとも2つから、車外対象物の種類を判別する。判別後、乗員保護装置1は、車外対象物の種類に応じて、乗員を拘束すべきか否かを判断する。
(もっと読む)
物体認識装置及び方法
【課題】 少ない演算量で、被検出対象のデータが混在しても安定して物体の形状を認識することができる物体認識方法、及びこの方法を用いた物体認識装置を提供する。
【解決手段】 移動体周辺に存在する物体を認識する物体認識装置であって、物体の表面形状情報を検出する物体検出手段1と、物体の輪郭形状を認識する形状認識手段2と、を備え、この形状認識手段2は、表面形状情報を構成する標本群から任意に抽出した標本に基づいて定めた形状モデルに対する標本群の一致度を演算して前記輪郭形状を認識する。
(もっと読む)
マルチビーム音響測深装置の動揺影響軽減装置又はこれを備えた海底探査船
【課題】 本発明は、簡素な構成で、計測可能なゾーンZが狭くならず、正確な計測結果が得られ、且つ、吊下げ装置等の周辺設備等が不要で、悪天候でも計測可能なマルチビーム音響測深装置の動揺影響軽減装置を提供する。
【解決手段】 そのため、船舶の船底に配設されたソナードームに内蔵されたマルチビーム音響測深装置の動揺影響軽減装置において、船舶の船底から垂下され下端部が前記ソナードームに連結された主支持部材と、ソナードームの左右端部及び前後端部と船底とを連結する複数の姿勢制御と、船舶に設けられ船舶の動揺を検出する動揺検出器と、動揺検出器からの信号に基づき複数の姿勢制御シリンダのストローク長を制御する動揺影響軽減制御装置とを備えた。
(もっと読む)
水中探知装置および水中探知方法
【課題】 水底が検知されない場合であってもおおよその水深値を提示可能であり、ユーザの使い勝手を向上させることができる水中探知装置の提供。
【解決手段】 水中から得た情報を表示部2に表示させることができる魚群探知機1は、水中に探知信号を送出すると共に水中からの反射信号を受信する送受波器4と、反射信号に基づいて水底Pを検知すると共に水深を算出する水底検出部26と、水底検出部26によって水底Pが検知されたか否か判定する水底検知判定部32と、水底検知判定部32によって水底検出部26が水底Pを検知していないと判断された場合に、水底検出部26による水深の算出値の前回値を水深値として表示部2に表示させるための水深表示画像生成部30、描画プロセッサ44およびビデオメモリ46とを備える。
(もっと読む)
車両用障害物検知装置
【課題】車両の運転者の運転により役立てることができる車両用障害物検知装置を提供する。
【解決手段】車両の4隅近傍に配置された超音波センサ4FL,4FR,4RL,4RRと信号送受信部11と位置検知部12とで障害物位置検出手段を構成している。接触判断手段たる接触予測部15は、位置検知部12による現時点の障害物の検出位置と進行軌跡予測部14により予測された車両1の進行軌跡とに基づいて車両1と障害物との接触可能性を判断し、上記障害物位置検出手段により相対位置が検出された障害物Bとの接触可能性が有ると判断したときと、上記障害物位置検出手段により相対位置が検出された障害物Bとの接触可能性が無いと判断したときとで表示器6の表示およびブザー5による警報音の周波数をそれぞれ変化させる。
(もっと読む)
201 - 220 / 249
[ Back to top ]