
Fターム[5J083AE06]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 測定対象 (1,034) | 面(壁面、液面、地面、海面等) (249)
Fターム[5J083AE06]に分類される特許
101 - 120 / 249
障害物検出装置
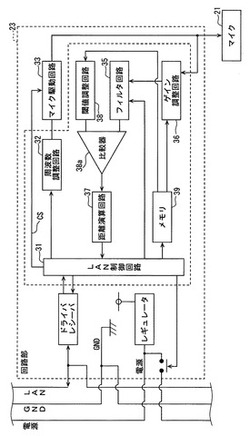
【課題】複共振マイクロフォン21を用いて、遠距離モードと近距離モードとを切り替えることができ、この2つの異なるモードを実現するために、ハードウエア的またはソフトウエア的に共用化を行う。
【解決手段】マイクロフォン21に、高周波数駆動信号と低周波数駆動信号を提供する回路部23を備え、この回路部23を制御する制御手段3を備え、回路部23には、単一の周波数調整回路32から出力された超音波パルス信号をマイクロフォン21に昇圧して印加するトランスを備え、少なくとも一部が遠距離モード近距離モード共用のマイク駆動回路33を備え、車体上で隣り合って配置されたマイクロフォン同士は、一方が遠距離モード送信時は、他方は、近距離モード送信になるように駆動される。
(もっと読む)
物体検出装置

【課題】 送信波を送信してから物体が存在すると判定するまでの応答性を良くすることのできる物体検出装置を実現する。
【解決手段】 送信素子Aから送信され、受信素子C,Dにより受信された受信波は、それぞれ障害物以外からの反射波である不要波RC1〜RC3,RD1〜RD3と、障害物反射波RC4,RD4とから構成される。振幅(電圧)が閾値Vthを超えており、かつ、その閾値Vthを超えたときの受信時間の受信素子C,D間における受信時間差Δtが規定時間ta以下である障害物反射波RC4,RD4を検出したときに障害物が存在すると判定する。
(もっと読む)
障害物検出装置
【課題】簡単且つ安価な構成で至近距離まで接近することなく輪どめなどの低い障害物を判定できるようにする。
【解決手段】自動車10の後部のバンパーよりも高い位置に送受信機3を配置し、後方に向けて超音波を送信して検出対象物からの反射波を受信する。このとき、受信する反射波のピーク値を検出して記憶する。自動車10が後方に移動するに従ってピーク値が変化するのをピーク値差分として算出し、検出エリアS内から外れる路面付近障害物Pの場合にはピーク値差分が「負」となることで判定できる。
(もっと読む)
水底下物体の探査類別方法及び装置
【課題】散乱波のレベルが高く類別に適した周波数を簡易に選定でき、水底下物体を精度よく類別可能な水底下物体の探査類別方法及び装置を提供する。
【解決手段】周回中に送波器3から所定の帯域で周波数を変化させた音波を送波すると共に、受波器4でその散乱波を受波して、水底下物体に対する方位角度を縦軸、周波数を横軸とした周波数散乱レベルの分布を作成し、作成した周波数散乱レベルの分布を基に、散乱波の強度が高く類別に適した周波数を選定すると共に、選定した周波数における散乱波の方向レベルパターンを抽出し、その散乱波の方向レベルパターンを予め蓄積したデータベースと照合することで、水底下物体の類別を行う。
(もっと読む)
水底地形測量方法およびシステム
【課題】水深が深い場合であっても水底地形を精度よく測量できる水底地形測量方法およびシステムを提供する。
【解決手段】GPSアンテナ2とウインチ5を設置した作業船14に、ウインチ5で繰出しおよび巻き取られるケーブル6を介して、ナローマルチビーム測探ソナー8、3軸加速度計測器9および水深計10を設置した曳航体7を接続し、超音波水中位置測量装置11の送波器11aを曳航体7に、受波器11bを作業船14に取付け、作業船14の移動速度とウインチ5の駆動の少なくとも一方を制御して曳航される曳航体7の深さ位置を調整して水中移動させつつ、ナローマルチビーム測探ソナー8、3軸加速度計測器9、水深計10の検知データ、GPSアンテナ2から送信される作業船14の位置データ、受波器11bが受信した曳航体7の位置データを制御装置4に入力する。
(もっと読む)
超音波振動子の駆動装置およびそれを備えた水中探知装置
【課題】超音波振動子21・22への駆動信号の出力と出力停止との切り替えを簡単に且つ安価な部品で行う。
【解決手段】駆動装置1は、超音波振動子21・22を駆動する駆動信号を出力する送信部11と、送信部11から超音波振動子21・22への駆動信号の出力経路6・7中に設けられ、高圧側巻線31b・32bが出力経路6・7に直列に接続されたトランス31・32と、トランス31・32の低圧側巻線31a・32aを短絡状態と開放状態とに切り替えるスイッチ部材33・34とを有する。
(もっと読む)
超音波センサ
【課題】
超音波を利用して物体を検知する超音波センサおいて、マイクロフォンに雪や霜等の異物が付着した時でも、残響時間延長による影響を排除して、障害物を検知可能な超音波センサを提供する。
【解決手段】
超音波を送受信するマイクロフォン101と、超音波を送信させるための送信回路103と、超音波を受信することにより得られる受信信号を増幅する増幅回路104と、増幅回路103により得られた受信信号に基づいて、物体を検知する検知回路105と、超音波を送信してから、検知回路105が検知を開始するまでの検知開始時間を設定する検知開始時間制御回路106と、マイクロフォン101の温度およびマイクロフォン101周辺の雰囲気温度を検知する温度検知回路107とを備え、検知開始時間制御回路106は、温度検知回路107により得られた温度に応じて、検知開始時間を制御する。
(もっと読む)
合成開口ソーナー
【課題】合成開口ソーナーにおいて海底堆積層に埋没した物体を正確に画像化するための、信号処理装置を提供する。
【解決手段】海底堆積層の音波伝搬時間と、堆積層がない場合の音波伝搬時間との時間差を、ソーナー受信信号のリサンプリングもしくは合成開口処理におけるカーバチャ形状の補正として与えることで、海底堆積層が存在することによる合成開口処理後画像中の対象物の輝度・コントラスト・位置精度などの描出性能を向上させる。さらに、前記手段をDPCやMEAなどの動揺修正手段と組み合わせることで、船体の動揺がある場合にも埋没物を精度良く描出する。
(もっと読む)
車両用周辺監視装置
【課題】路面反射による障害物の誤検知影響分を取り除くことで、車両周辺に存在する障害物の検知精度の向上を図ることができる車両用周辺監視装置を提供すること。
【解決手段】車体に取り付けられた各ソナー7,8,9,10と、各ソナー7,8,9,10から発射した球面送信波の反射波を捕らえて車両周辺に存在する障害物を検知する障害物検知コントローラ12と、を備えた車両用周辺監視装置において、各ソナー7,8,9,10の取り付け姿勢を検出する姿勢センサ11を設け、障害物検知コントローラ12は、検出されたソナー姿勢に基づき、路面からの反射波を取り除く閾値パターンの形状を、ソナー姿勢によって変化する路面反射強度特性に沿った形状に設定し、捕らえた反射波による路面反射強度特性から設定した閾値パターンを取り除いて障害物を検知する。
(もっと読む)
地すべり計測装置、地すべり検出装置、地すべり計測システム、及び地すべり計測方法
【課題】従来よりも手間がかからず、かつ、簡易な構成でありながら、広範囲に渡る地表の移動の計測を行うことができる技術を提供する。
【解決手段】地山の地表の移動を計測する地すべり計測装置であって、前記地山のうち地すべりを計測する地すべり計測対象領域に設置され、該地すべり対象領域の地表の移動と共に移動し、音を出力する音出力手段、からの音を取得する音取得手段であって、該地すべり計測対象領域と離れた領域に設置される音取得手段と、前記音取得手段で取得される音の到達時間から、前記音出力手段と前記音取得手段との到達距離を複数回算出し、複数回算出した到達距離の変位に基づいて前記地すべり計測対象領域の地表の移動を計測する移動計測手段と、前記移動計測手段による計測結果を出力する計測結果出力手段と、を備える。
(もっと読む)
車輛用ヘッドランプの光軸調整方法
【課題】車輛の進行方向前後に超音波発信器と超音波受信器とからなる超音波センサを有した傾斜測定装置を用い、走行中、前後の超音波センサが時間差を持って路面までの距離を測定する場合も、正確に傾斜測定装置の傾斜角度を測定し、車輛用ヘッドランプの光軸を正しく調整できるようにした、車輛用ヘッドランプの光軸調整方法を提供することが課題である。
【解決手段】前後の超音波センサで交互に前記路面までの距離Hf、Hrを複数測定し、それぞれの超音波センサによる測定結果の平均値を算出した後、該平均値により、前後の超音波センサの仮想路面に対する角度αを算出してヘッドランプの光軸を調整するようにした。
(もっと読む)
超音波計測装置
【課題】船体の三次元位置及びロール,ピッチ,ヨウの6条件を把握することなく、高速運航下においても、海底形状を連続計測することができる超音波計測装置を提供する。
【解決手段】方位方向に周波数の異なる超音波を送波する送波器と、前記送波器から送波された超音波の対象物からの反射波を受波する受波器と、前記対象物からの反射波の情報を三次元計測結果として処理する処理手段とを備える超音波計測装置において、前記三次元計測結果を順次連結させる連結手段を含む。
(もっと読む)
スキャニングソナー装置および追尾方法
【課題】指定した追尾対象の追尾を継続することができるスキャニングソナー装置および追尾方法を提供する。
【解決手段】前回の観測結果において追尾対象とした像の重心の座標の絶対位置を基準位置とし、その周囲に追尾対象が含まれるように設定した領域を第1の観測領域として設定する第1の領域設定手順と、第1の領域設定手順によって設定された第1の観測領域内の基準位置に今回の観測結果による追尾対象の候補が存在するか否かが最初の判断である判断方法により次に追尾対象とする当該候補を設定する追尾対象設定手順と、を含む。
(もっと読む)
水中情報収集システム
【課題】水中航走体の移動領域の制約を低減すること。
【解決手段】水中航走体1は、自己の有する動力で水中を移動可能であり、水中情報を収集するサイドスキャンソーナ10C等と、サイドスキャンソーナ10C等が集めた水中の情報を送信可能な水中側第1音響モデム12Hとを有している。水上移動体2は、水中側第1音響モデム12Hと通信可能であり、水中側第1音響モデム12Hから送信された水中情報を受信する水面側第1音響モデム22Hと、水中航走体1の位置を検出する水中位置計測装置21とを有する。そして、水上移動体2は、水中航走体1の位置を検出しながら、水中航走体1の移動に合わせて水面Hを移動する。
(もっと読む)
自律移動装置
【課題】 超音波の干渉による誤検出を防止しつつ、複数の超音波センサによるスキャン時間を短縮することが可能な自律移動装置を提供する。
【解決手段】 自律移動装置1は、超音波を発信するとともにその反射波を受信することにより物体を検出する16個の超音波センサ21〜36を備える。16個の超音波センサ21〜36は、上下2段に分けて、自律移動装置1の本体10の外周面に周方向に沿って等間隔に配置されている。また、自律移動装置1は、16個の超音波センサ21〜36のうち、超音波が互いに干渉しない十字状の位置に配置されている4つの超音波センサを一組として同時に駆動するとともに、駆動する組を所定時間毎に順次切替えるインターフェースボード42を備える。このインターフェースボード42は、超音波センサ21〜36の結果出力時間を計測して物体までの距離を算出し、その算出結果としての距離情報を電子制御装置60に出力する。
(もっと読む)
音響画像シミュレーション装置、方法、及びプログラム
【課題】音響画像装置の制御パラメータの良否を評価すること、音響画像装置によって取得される音響画像を十分な精度で模擬すること、及び、音響画像装置の定量的な性能評価を実現させることを目的とする。
【解決手段】複数の面積要素からなる海底面を形成する海底面形成部22と、水中航走体の航跡データ等に基づいて、シミュレーション空間内に設定される音源、受信位置、及び対象面積要素を対応付けた条件テーブルを作成する条件作成部23と、条件テーブルに基づいて、シミュレーション空間内に、音源、受信位置、対象面積要素を設定し、該受信位置にて受信される散乱波を推定して模擬信号を生成する模擬信号生成部24と、模擬信号生成部24によって生成された模擬信号を用いて海底面の音響画像を作成する信号処理部26とを備える音響画像シミュレーション装置10を提供する。
(もっと読む)
超音波式距離センサ及び超音波式距離測定方法
【課題】周囲温度が均一でない場合でも正確なレベル測定を可能としつつ、容易に且つ低コストで設置すること。
【解決手段】超音波2を発信すると共に反射波3を受信する超音波送受波手段4を備え、超音波を発信してから反射波を受信するまでの時間を測定することにより、反射面F1までの距離Xを検出するセンサであって、超音波の伝搬方向に沿って延在する構造物K1の表面温度を測定するため、回動可能に形成された温度計5と、超音波を発信してから反射波を受信するまでの超音波の伝搬時間実測値と、構造物の表面温度から算出した超音波の伝搬速度とを用いて、反射面までの距離を検出する制御部6と、を備える超音波式距離センサ1を提供する。
(もっと読む)
障害物検知装置
【課題】短距離検知から長距離検知が可能な障害物検知装置を提供すること。
【解決手段】超音波を送波及び受波することによって障害物を検知する障害物検知装置100であって、超音波を送波する送波回路25と、超音波を受波する受波回路26と、受波回路26にて受波した受波信号を増幅する増幅回路261a〜261dとを備え、増幅回路261a〜261dは、送波回路25による超音波の送波からの時間の経過に伴い利得を上げるものであり、送波回路25が超音波を送波することによって生じる残響がなくなるタイミングで利得を上げ始めるSTC回路261cとを備える。
(もっと読む)
電子回路装置
【課題】液状樹脂がケース10とカバー20に垂れることを防止することが可能な超音波センサ装置100を提供すること。
【解決手段】ケース10とカバー20にて囲まれる空間70に電子回路30(回路基板31、電子部品32a、電子部品32bなど)が収納されて、封止剤40にて封止された超音波センサ装置100であって、カバー20は、ケース10の側壁111〜114の内側であり、側壁111〜114の端面111a,111b,112a,112b,113a,114aと同一もしくは、側壁111〜114の端面111a,111b,112a,112b,113a,114aよりも底面117側に配置された状態でケース10の開口を塞ぐ。
(もっと読む)
障害物検知システム
【課題】周囲のノイズレベルが大きい状況下でも、障害物検知の精度低下を抑制しつつ、障害物の検知を行なうことのできる障害物検知システムを提供する。
【解決手段】障害物検知システム1は、超音波センサ10による障害物検知動作を繰り返し実行するとともに、各障害物検知動作において受信した反射波レベルが判定閾値Thを超えることが判定回数Nだけ連続した場合には、障害物が周囲に位置する旨を判断する。また、障害物検知システム1は、超音波センサ10によるノイズ監視動作を実行するとともに、このノイズ監視動作にて受信した超音波をノイズとしてその電圧レベルを判断し、この判断したノイズレベルに応じて、判定閾値Thを設定する。
(もっと読む)
101 - 120 / 249
[ Back to top ]