
Fターム[5J083CA11]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 送受波器(センサ) (1,888) | 構成 (537)
Fターム[5J083CA11]の下位に属するFターム
アレイ(ラインアレイ、リニアアレイ) (300)
マトリックス (112)
Fターム[5J083CA11]に分類される特許
101 - 120 / 125
超音波センサ装置

【課題】小型・低コストで、車のバンパー等に装着するに際して取り付け精度の影響を受け難く、水滴やごみの付着および湿度変化による検出精度劣化の問題を解決できる超音波センサ装置を提供する。
【解決手段】超音波の送信素子S1と受信素子R1〜R4を備えてなり、送信素子S1から超音波を送信して、被検出体で反射された超音波を受信素子R1〜R4により受信して演算処理する超音波センサ装置100であって、1個以上の送信素子S1と2個以上の受信素子R1〜R4が、同一基板10に集積化されてなる超音波センサ装100とする。
(もっと読む)
非破壊試験用探針の位置測定
標準的な非破壊試験用の探針(4)は、いつでも分析される表面(1)における装置(4)の位置を測定するために、本発明による位置測定システム(10)と結合される。前記位置測定システム(10)は、超音波の放射源(12)と、前記放射源(12)と受信器(14,16)との間の距離を測定するための手段と結合された2つの超音波受信器(14,16)とを備え、各構成要素は互いに相対的に自由に移動可能である。前記放射源(12)と前記探針(4)との間の結合は三角測量によって測定された前記探針(4)の位置決定を可能とする。配置およびマッピングの方法も開示される。 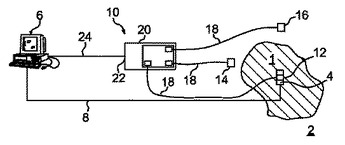 (もっと読む)
(もっと読む)
位置検出システム

【課題】施工が容易で且つ超音波受信装置の配置設計が容易な位置検出システムを提供する。
【解決手段】超音波を発生可能な音源および音源を駆動するドライバを具備し位置検出対象の物体Aに搭載される音源ユニット1と、音源から送波された超音波を受波するとともに受波した超音波を電気信号である受波信号に変換する複数個の受波素子21aが同一基板21b上に配列された超音波アレイセンサからなる超音波受信装置21を具備したセンサユニット2とを備える。センサユニット2は、超音波受信装置21である超音波アレイセンサの各受波素子21aで超音波を受波した時間の時間差と各受波素子21aの配置位置とに基づいて音源11の存在する方位(超音波の到来方向)を求める位置演算部を備えている。
(もっと読む)
位置検出システム
【課題】施工が容易で且つ低コスト化が可能な位置検出システムを提供する。
【解決手段】移動体Aの移動空間内へ超音波を送波可能な音源を具備し天井面200の定位置に配置される音源ユニット1と、移動体Aに搭載され音源から送波された超音波を受波するとともに受波した超音波を電気信号である受波信号に変換する複数個の受波素子が同一基板21b上に配列された超音波アレイセンサからなる超音波受信装置21および上記基板21bに平行な面内における移動体Aの向きを検出する向き検出手段たるジャイロセンサを具備するセンサユニット2とを備えている。センサユニット2は、超音波受信装置21である超音波アレイセンサの各受波素子21aで超音波を受波した時間の時間差と各受波素子21aの配置位置と向き検出手段により検出された移動体Aの向きとに基づいて超音波受信装置21に対して音源の存在する方位を求める位置演算部を備えている。
(もっと読む)
海の中の個人のための信号伝達/位置検出装置及びその使用方法
海の中の個人のための信号伝達及び位置検出装置及びその使用方法。この海の中の個人(1)のための信号伝達及び位置検出装置は、海の中の個人(1)が携帯し、第1の信号(2a)の搬送波を送信するように設定された個人警報器(2)を構成する超音波送信器と;海面上に配置され、個人警報器(2)によって送信された第1の信号(2a)を抽出することができる水中アンテナ(4)と、第2の超音波信号(2b)を送信する手段と、第2の超音波信号(2b)に応答して受信された超音波信号の関数として個人警報器(2)の位置を計算すること、及びGPS等の全地球測位システムの座標に前記情報を変換することができる手段と、無線受信機(6)を備えた携帯又は固定警報処理センター(7、8)にこれらの座標を示す信号を送信することができる電波(5)を送信するための装置と、を備える地表観測手段(3)と;を具備する。  (もっと読む)
(もっと読む)
追尾システムおよびそれに用いられる自走体
【課題】 移動体の相対位置を高精度に計測して信頼性の高い追尾が可能な追尾システム、およびそれに用いられる自走体を提供する。
【解決手段】 移動体2に配置されたトランスポンダ20とトランスポンダ20を追尾する自走体1とを含む追尾システムである。(i)自走体1は、時間T(0≦T)に関する情報を含む第1の超音波を送信し、(ii)トランスポンダ20は、第1の超音波を受信し、時間Tの経過後に第2の超音波を送信し、(iii)自走体1は、第2の超音波を受信することによってトランスポンダ20の位置を推定する、というステップを含む位置推定処理が行われる。時間Tは、第2の超音波が、自走体1の周囲に存在する物体によって反射されて受信される第1の超音波と識別可能となるように設定される。そして、上記物体の存在状況に応じて時間Tが増減されるように、物体の存在状況に応じて時間Tに関する情報が決定される。
(もっと読む)
異常診断装置および方法ならびにプログラム
【課題】 移動体に対するセンサの取り付け位置の制約を無くし、診断に関する信頼性の向上をはかる。
【解決手段】 移動体内の任意の位置にマイクや振動センサ等から成るセンサ1を設置し、車両異常診断装置3を構成するコンピュータ(演算処理装置)が、移動体内における音を取り込み、独立成分分析を行って音の分離と音源位置の特定を行うこととした。また、センサ1の設置位置近傍以外における診断部品の場所を特定し、移動体内の任意の場所における信号強度を推定して乗り心地や騒音に対する警告を行うこととした。
(もっと読む)
距離測定方法および距離測定システム
【課題】 比較的低いコストで実現でき、且つ、水晶時計のような低コストのタイマーを用いつつも高い精度で距離測定を行うことのできる距離測定方法を提供する。
【解決手段】 第1の地点において音波と電波とを同時に発し、第2の地点において第1の地点から発せられた電波が受信されると同時に計時を開始し、その後、第1の地点から発せられた音波を受信し、第2の地点における電波が受信されたときから音波が受信されるまでの経過時間を用いて、第1の地点と第2の地点間の距離を求める。
(もっと読む)
音源位置検出装置及び方法
【課題】 前方に位置する音源の位置(上下左右方向)を、マイクロフォン数が少なく簡単な構造で正しく検出することができる音源位置検出装置及び方法を提供する。
【解決手段】 前方に位置する音源1に対し、左右に所定の間隔を隔てて位置する左右の反射部材12と、各反射部材で反射された反射音1bを音源からの直接音1aと共に受信する左右のマイクロフォン14と、両方のマイクロフォンの受信音から音源の位置を求める位置検出装置16とを備える。左右の反射部材12は、マイクロフォンを通る鉛直軸を中心として上下方向に反射距離が異なる曲線形を回転させた回転面の少なくとも一部を反射面12aとして有する。位置検出装置16により、受信音の左右のマイクロフォンへの到達時間の差から音源の左右方向の位置を求め、受信音のスペクトル情報から音源の上下方向の位置を求める。
(もっと読む)
距離測定装置及び距離測定方法
【課題】定在波を利用した距離測定装置において、短時間で正確に測定対象までの距離を測定する。
【解決手段】本発明の距離測定装置1は、異なる周波数の出力信号を同時に複数発振する発振器群6と、発振器群6で発振された各周波数と同一周波数の送信信号を測定対象へ送出する超音波発信素子群7と、送信信号の測定対象による反射信号を検出する広帯域超音波受信素子8と、反射信号を周波数成分ごとに分解して周波数成分ごとの受信信号を生成するデジタルフィルタ群9と、受信信号と同一周波数の出力信号を信号合成して周波数成分ごとの合成信号を生成する信号合成部4と、周波数成分ごとの合成信号の位相変動周期を検出し、測定対象までの距離を算出する信号処理部5とを備える。
(もっと読む)
位置検出システム
【課題】 センサ等、複雑な設備を必要とせずに人の位置を検出することができる位置検出システムを提供する。
【解決手段】 各フロアの床面等に設置されているマイクから音声を集音する。集音した音声は音声データとして音声分析部5に伝達する。音声分析部5は伝達された情報から足音データであると判断したとき制御部2に伝達し、制御部2は足音が集音されたマイクの位置付近のスピーカから音声が発音されるようにフロアコントロールユニットに指示する。また、足音が集音された付近のライトが明るくなるようにフロアコントロールユニットに指示するようにしてもよい。これにより、建物内の人の位置に応じてスピーカから音声を発音したり、ライトの明るさを変化させたりすることができる。さらに、集音した足音を解析して足音を識別して認識することができるので、それぞれの人に応じた音声をスピーカから発音することもできる。
(もっと読む)
実時間型水中音響トモグラフィ装置及び水中音響トモグラフィシステム
【課題】 正確に流速の実時間測定ができ、かつ水温・流速場の実時間3次元解析が可能な音響トモグラフィ装置及び音響トモグラフィシステムを提供する。
【解決手段】 測定対象水域において、当該水域を横断する音波を送受信することにより、当該水域の流速及び/又は温度の解析のための音波伝搬時間情報を収集する音響トモグラフィ装置100であって、上記音波を送信する手段と他の音響トモグラフィ装置から送信された音波を受信するための手段とが一体化された送受信器1を、複数備えており、複数の送受信器1…は、当該水域の水中に、水面に対して鉛直方向に並べて設置される音響トモグラフィ装置100によれば、正確に流速の測定ができ、かつ水温・流速場の3次元解析に利用可能な音波伝搬時間情報を実時間で取得することができる。
(もっと読む)
位置検出システム、発信装置、サーバならびに同システムにおける無線信号の衝突回避方法
【課題】 無線信号の衝突を回避しつつタグの消費電力を軽減する。
【解決手段】 第1の無線信号を受信後、第2の無線信号を送信するまでに、タグ(TG)固有の待機時間を入れ、送信時間をシフトすることにより、あるいは、タグが第1の無線信号の電界強度を測定し、電界強度が小さいときに待機時間を短く設定し、その情報を含めてサーバへ第2の無線信号を送信することにより、サーバ(SV)は、タグから受信した第2の無線信号が示す符号から待機時間を算出する。また、第1の無線信号に信号を入れ、タグがその情報を読みルールに従い第2の無線信号を送信するか否かを決定することで衝突回避してもよい。
(もっと読む)
水中航走体の位置計測システム及び、位置計測方法
【課題】 水中航走体から発せられるピンガ信号を正確に受信するとともに、受信したピンガ信号について信号か残響によるノイズかを判別し、水中航走体の位置を算出する位置計測システムを提供する。
【解決手段】 水中航走体から所定の時刻で深度情報を含んだ第1及び第2パルスからなるピンガ信号を発信し、このピンガ信号を複数の計測ブイで受信し、計測ブイの位置情報とともに計測装置へ送信する。計測装置では所定の時刻からの伝搬時間から距離を求め、水中航走体の深度情報と、計測ブイの位置情報とに基づき、水中航走体の正確な位置を算出する。
(もっと読む)
超音波式位置情報送信装置、超音波式位置情報受信装置および超音波式位置情報検出装置
【課題】GPS衛星からの電波が届かない地下、建物内等において、簡易なシステムで所在位置を特定することが可能となる超音波式位置情報検出装置を提供する。
【解決手段】超音波式位置情報送信装置は、設置場所あるいはその周辺に関する位置情報を送信する情報提供装置30と、情報提供装置30から位置情報を受信する受信部11と、受信部11が受信した位置情報を超音波で送信する超音波送信部12とを備える。また、超音波式位置情報受信装置は、超音波を用いて送信された位置情報を受信する超音波受信部21と、超音波受信部21で受信した位置情報の検出結果に基づいて現在位置を特定する検出部22とを備え、携帯可能である。さらに、超音波式位置情報検出装置は、超音波式位置情報送信装置と超音波式位置情報受信装置とを組み合わせたものである。
(もっと読む)
障害物検知装置
【課題】 高い汎用性を有する障害物検知装置を提供すること。
【解決手段】 センサ10は、ECU30から送信される周波数設定フレームに応じて、周波数調整回路12において設定すべき超音波パルス信号の送信周波数と、フィルタ回路15のフィルタ処理における中心周波数を設定する。
(もっと読む)
機器艤装船舶
【課題】コンパクトな構造で、かつROVの位置の検知精度が向上する。
【解決手段】推進機を備え、測量や調査等に用いるROVの位置を検知するトランスポンダと、3個以上のトランスデューサを船体に艤装する機器艤装船舶であり、トランスデューサを取り付けた支持部材と、支持部材を直線状に移動させる移動機構とを有するトランスデューサ揚降装置を備え、トランスデューサを収納状態で船体の内部に位置させ、使用時に直線状に移動させて船体の開口部から斜め側方へ突出して水中へ入れる。また、トランスデューサを取り付けた支持部材と、支持部材を円弧状に移動させる移動機構とを有するトランスデューサ揚降装置を備え、トランスデューサを収納状態で船体の幅より内側に位置させ、使用時に円弧状に移動させて船体の幅より外側の水中へ入れる。
(もっと読む)
センサ情報統合解析装置および方法
【課題】複数の音響センサの情報を処理する信号処理装置では、音響センサごとにパラメータを推定する必要があり、センサ数に応じて処理負荷が高くなるので、複数の音響センサのパラメータ推定にかかる負荷を低減する必要がある。
【解決手段】複数の音響センサをグループ化し、グループ内の音響センサの平均位置に1つの仮想的な音響センサが存在すると仮定し、仮想的な音響センサのパラメータの最適化を仮想的な音響センサごとに行い、各グループに含まれる音響センサのパラメータをそのグループの仮想的な音響センサのパラメータと同一に設定する。
(もっと読む)
障害物検知装置
【課題】 異常発生を誤って報知する回数を少なくするとともに、速やかに異常発生を報知することができる。
【解決手段】 S200、及びS300における異常判定時間(A、B)は、各々時間長さが異なるように設定される。すなわち、センサ11〜16と最初に(初回に)通信を行う場合の異常判定時間(A)は、初回に通信を行って正常に通信が行われた後に通信を行う場合の異常判定時間(B)よりも短い時間(A<B)となるように設定される。
(もっと読む)
障害物検出装置および障害物検出方法
【課題】最小限の検出手段を用いて確実に障害物を検出することのできる障害物検出装置および障害物検出方法を提供することを目的とする。
【解決手段】障害物直線距離検出器102は、動輪付台車101の移動方向に向かって左側に配設され、一方、障害物直線距離検出器103は、障害物直線距離検出器102に対し動輪付台車101の移動方向に向かって右側に位置するように配設されている。障害物直線距離検出器102の右側障害物検出領域152の検出軸152Aと、障害物直線距離検出器103の左側障害物検出領域151の検出軸151Aとを交差させるようにして、障害物を検出(障害物までの距離を測定)する。このため、障害物直線距離検出器102,103の検出精度を損なうことなく、2つの障害物直線距離検出器を用いて、確実に障害物までの距離を測定することができる。
(もっと読む)
101 - 120 / 125
[ Back to top ]