
Fターム[5J083CA11]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 送受波器(センサ) (1,888) | 構成 (537)
Fターム[5J083CA11]の下位に属するFターム
アレイ(ラインアレイ、リニアアレイ) (300)
マトリックス (112)
Fターム[5J083CA11]に分類される特許
81 - 100 / 125
位置検出システム

【課題】誤差を考慮して位置を検出することにより求めた位置の信頼性を高める。
【解決手段】送信装置1は、疎密波を間欠的に送波する疎密波送波部11とを備える。受信装置2は、疎密波を受波する疎密波受波部21を備える。位置演算部24は、疎密波受波部21で受波した疎密波の到来方向を求め、さらに到来方向の誤差範囲から送信装置1が移動する平面内での送信装置1の位置の誤差範囲を求める。送信装置1の位置の誤差範囲の中心座標を送信装置1の座標位置として求め、さらに、誤差範囲の中で当該座標位置からの最大距離を最大誤差として求める。
(もっと読む)
自律走行装置およびプログラム

【課題】本体に対し2面に壁がある状況でも多重反射による誤検知を改善する自律走行装置を提供することを目的とする。
【解決手段】複数の超音波センサ2、3と、超音波センサ2を駆動する送信手段4と、超音波センサ3の受信信号を増幅する増幅手段8と、基準電圧設定手段6と、基準電圧と増幅手段8とを比較する比較手段7と、超音波の送信後の経過時間を計時する計時手段9と、本体1と障害物との距離を認識する距離判定手段11と、距離判定手段11の出力を受けて送信手段4と基準電圧設定手段6とを制御する制御手段5とを有し、制御手段5は、本体1の動作状態と距離判定手段11の出力に応じて送信手段4の送信方法を変更する。これによって、本体が壁や障害物に囲まれた状態で、本体が動作する際、近くに存在する壁や障害物による多重反射により障害物などの誤検知を改善することができる。
(もっと読む)
位置検出システム
【課題】検出対象ごとの移動の履歴の分析を容易にするとともに情報の秘匿性を高めた位置検出システムを提供する。
【解決手段】送信装置1は定位置に固定され疎密波を間欠的に送波する疎密波送波部11と、赤外線を伝送媒体とするワイヤレス信号により識別データを送信する識別データ送信部12とを備える。受信装置2は、移動体のような位置検出の検出対象に搭載され、疎密波を受波することにより受信装置2の位置を記憶部26に格納する。受信装置2は、検出対象を特定する固有情報を入力する固有情報入力部28と、制御部20で求めた送信装置1の位置の履歴と固有情報入力部28から入力した固有情報とを記憶する記憶部27と、記憶部27に格納した記憶内容を非無線の伝送経路で取り出すインターフェイス26とを備える。
(もっと読む)
ダイバー用ナビゲーション支援
ダイバー・ユニットは特定の目標物への距離と方向とを算出する。目標物が障害に遮られている場合、ダイバー・ユニットは別のダイバー・ユニットからナビゲーション支援データを受け取る。ナビゲーション支援データは両ダイバー・ユニットを結んだ共通の基準に対する方向の情報を含む。 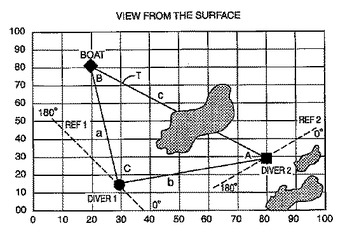 (もっと読む)
(もっと読む)
制御ボックスを備えないリバーシングセンサ
【課題】 制御ボックスを備えないリバーシングセンサを提供することにある。
【解決手段】 リバーシングセンサは、マスター・スレーブ・タイプのセンサ構造物に適用される。リバーシングセンサは、少なくとも1つのマスターセンサと、少なくとも1つのスレーブセンサとを含む。マスターセンサは、マイクロプロセッサと、超音波放射回路と、反射波検出回路と、アラーム回路とを含む。マスターセンサは、障害物の検出を管理するのみならず、各スレーブセンサの動作タイミングを調整する。これにより、マスターセンサは、一般的な制御ボックスの機能の代わりをする。マスターセンサは、スレーブセンサに接続されており、また検出結果を収集すべく各スレーブセンサのタイミングの制御にポーリング法と時分割原理とを用いる。スレーブセンサは、マイクロプロセッサと、超音波放射回路と、反射波検出回路とを含む。
(もっと読む)
車両と対象物体との距離を求める装置および少なくとも2つの送受信手段の間隔を求める方法
【課題】信号を送信し対象物体から反射したエコーを受信する送受信手段と、反射エコーの受信信号に基づき距離d1,d2,k,x,yを求める電子ユニットを用いて、車両と対象物体との距離を求める際、各送受信手段の間隔を少なくとも同じ精度を維持しながらいっそう簡単に捕捉できるようにする。
【解決手段】電子ユニットは、送受信手段の種々の感度で、および前記対象物体に対し一定の距離で、反射エコーの受信信号を捕捉し、種々の感度で受け取った受信信号に対し平均値を形成する。
(もっと読む)
ICタグ及びICタグを用いた位置検出システム
【課題】 所定の空間において時間の経過と共に位置が変化する対象物を特定するための情報を非接触方式で発信することができる低コスト且つ小型化されたICタグを提供する。
【解決手段】 少なくとも、所定の情報が格納されているICチップ31と該ICチップ31に電気的に接続される非接触通信用アンテナコイル32とを有し、外部アンテナから発信される電波を介して非接触通信用アンテナコイル32で起電をトリガとして起電した際に、非接触方式で情報を該外部アンテナへ送信するICタグ30において、ICチップ31に電気的に接続されると共に、超音波を発信する超音波圧電素子33を具備し、非接触通信用アンテナコイル32が外部アンテナからの電波を受信して起電した際に、ICチップ31に予め格納された自身を識別するための識別番号を送信すると共に、超音波を発信する。
(もっと読む)
情報収集システム
【課題】 コン柱に張られた電線の弛度に関して、高い確度で異常発生を通報することのできる、情報収集システムを得ることを目的とする。
【解決手段】 地面との距離に応じた信号を出力する超音波センサと、当該超音波センサの出力情報及び自己の識別情報を送信する無線通信部とを有し、コン柱に付設されたセンサノードと、
上記センサノードから送信される伝送情報を収集し、収集した情報を、当該センサノードとは通信プロトコルの異なる他の通信ネットワークに伝送するゲートウェイサーバとを備え、各センサノードが、自己の通信可能距離内に存在する他のコン柱に搭載されたセンサノードとの間で、無線アドホックネットワークを構成するようにした。
(もっと読む)
追尾システム
【課題】移動体の相対位置を高精度に計測して信頼性の高い追尾が可能な追尾システム、およびそれに用いられる自走体を提供する。
【解決手段】移動体2に配置された超音波発信源20と超音波発信源20を追尾する自走体1とを含む追尾システムである。4個の超音波受信装置を自走体1上の直線上に備え、そのうち2個は近接した位置に配置され、残りの2個は前記2個から離れた位置で近接して配置される。(i)超音波発信源20は、超音波を一定間隔で送信し、(ii)自走体1は、超音波を受信後位相を求め、(iii)位相データの中から最適な位相情報を抽出し、(iiii)2組の受信器間の位相差より正確な位置を推定する、というステップを含む位置推定処理が行われる。最適な位相情報が存在する時間帯は、各超音波受信器で別々に求められる。
(もっと読む)
障害物検知装置
【課題】 ノイズによる誤報知を排除しつつ、障害物検知を早期に確定することができる障害物検知装置を提供すること。
【解決手段】 反射波を受波していないときには、各超音波センサ20FR、20FL、20RR、20RC、20RLを所定の周期T1で送受信動作させる。超音波センサ20が反射波を受波した場合には、その超音波センサ20が対応付けられた動作タイミング信号の周期を所定の周期T1よりも短い周期T2となるように制御し、その送受波動作の周期をT1よりも短いT2とする。
(もっと読む)
ヘッドマウントディスプレイ装置及び移動支援データ提供装置
【課題】 マーチングバンドの陣形を形成する各演奏者を楽曲の進行に従って良好に誘導すること。
【解決手段】 マーチングバンドの隊列を組む各演奏者に、通信機能を搭載したヘッドマウントディスプレイを装着させる。そして、各演奏者の動きを統括する装置から、ある決められた陣形を作り出すのに必要な各演奏者の移動を支援する移動支援データを発信し、その移動支援データの内容を各演奏者のヘッドマウントディスプレイに表示させる。
(もっと読む)
超音波を利用した位置推定方法、位置推定システム及び受信装置
【課題】超音波を利用して無線リモコンの2次元位置を推定する位置推定方法及びシステムを提供する。
【解決手段】リモコン120から送信された複数の発信信号を受信する(a)ステップと、受信されたそれぞれの発信信号に含まれた赤外線信号と超音波信号との間の時間遅延を測定する(b)ステップと、測定された時間遅延を利用して、受信されたそれぞれの発信信号に対するリモコン120の位置を推定する(c)ステップと、を含む超音波を利用した位置推定方法。
(もっと読む)
レーダ装置および類似装置
【課題】
複数のレーダアンテナから得られる探知データを正確に合成して表示するレーダ装置を提供する。
【解決手段】
レーダアンテナ11から得られた探知データは相関処理部91Aで相関処理される。レーダアンテナ21から得られた探知データは相関処理部91Bで相関処理される。レーダアンテナ21からの相関処理データと同じアドレスを指定するマスク画像は、マスク領域発生部32により設定されてマスク用画像メモリ62に書き込まれる。これら相関処理部91A,91Bの各相関処理データはレーダアンテナ11,21の設置位置に応じたアドレス設定がされており、相関処理部91Bの処理用画像メモリ902B、マスク用画像メモリ62は共通のアドレスが設定されている。表示用画像メモリ61は、マスクデータに従って入力された相関処理データを表示画面に設定されたアドレスに従って記憶するとともに表示器10に出力する。
(もっと読む)
マルチスタティック計測方法及び方式
【課題】海域の水中音速分布と水中目標位置を同時に推定し、高い精度で目標位置を計測する。
【解決手段】船舶Aの音波発信部1は音波を発信し、音波発信時刻計測部2で音波発信時刻を計測し、位置計測部3で船舶Aの位置を計測し、情報送信部4で前記時刻と位置を情報処理を行う船舶Cに送信する。船舶Bの音波受信部5は船舶Aからの音波を受信し、音波受信時刻計測部6で音波受信時刻を計測し、位置計測部7で船舶Bの位置を計測し、情報送信部8で前記時刻と位置を情報処理を行う船舶Cに送信する。船舶Cの情報受信部9は情報送信部4、8からの情報を受信後、音速分布計算部8で音速分布を、インバージョン法を用いて計算し、音速分布表示部9で表示し、水中目標位置計算部10は、先に計算した音速分布を利用し、水中目標Tからの反射音波の到達時刻を満たすように、水中目標位置を、インバージョン法を用いて計算し、水中目標位置表示部11で表示する。
(もっと読む)
車両の距離測定システムの距離測定データを評価するための方法および装置
本発明は、車両の距離測定装置の距離測定データを評価する方法に関する。車両の、観察される周囲環境のカメラ画像(100)を得て、距離測定装置によって、観察される同じ周囲環境から、距離測定データを得る。カメラ画像(100)を表示装置に表示し、距離測定データに従って、距離情報(1a´,1b´,2´)をカメラ画像(100)に統合する。本発明によれば、車両の経路(4a,4b)を確定し、場合に応じて、カメラ画像(100)に統合する。 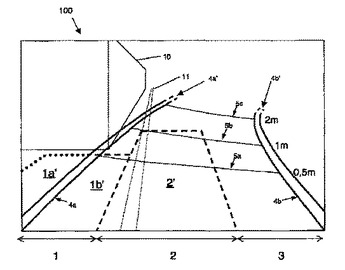 (もっと読む)
(もっと読む)
アクティブソナーのデータ解析方法及び記憶媒体
【課題】アクティブソナーにおいて、ターゲットから反射して得られたエコーデータは瞬間的に存在するのみであり且つこのエコーは様々な影響を受け、その包絡線は不規則で多種多様になる。そのため、斯かるアクティブソナーのエコーを画一的に解析し、2次元に可視化する方法はなく、統計的なものに頼らざるを得なかった。
【解決手段】検波後のエコーデータを画一的に解析するために、伝播損失補正正規化処理(ステップA2)を行う。そして、この補正後の波形データについて、特徴データ抽出処理(ステップA3)において、ピークレベル検出処理(ステップB1)、エコー長検出処理(ステップB2)およびエコー形状判定処理(ステップB3)を含む特徴データ抽出処理(ステップA2)を行う。また、特徴データを自己組織化マップに入力して学習を行って、これらの特徴に基づいて分類を行い、2次元可視化する。更に、補正後波形データを用いて誤分類データを検索し、マップ上に表示するための誤分類データ検索処理(ステップA12)を行う。
(もっと読む)
水中位置検出システム、音源装置、水中位置検出装置、および水中位置検出方法
【課題】 ダイバーが自分の位置を把握しながら散策でき、水底に装置を設置する必要がなく、各装置の小型化を実現し、各装置が信号を送受信するために費やす時間を低減することが可能な水中位置検出システム、装置および方法を提供することを目的とする。
【解決手段】 音源装置は、外部の測位手段からの測位情報を取得する手段と、自己の位置を算出する手段と、自己の位置を重畳して所定強度の音波として水中に照射する音源とを備え、水中位置検出装置は、照射された音波を取得する手段と、取得した音波に重畳された音源装置の位置を得る処理と、音波の強度に基づいて音源装置までの距離を得る処理とを行うことで、複数の音源装置の位置および複数の音源装置までの距離を取得する手段と、取得した複数の音源装置の位置および複数の音源装置までの距離に基づいて所定の測位処理を行うことで、自己の位置を取得する手段と、を備える。
(もっと読む)
自律走行体システム
【課題】複数の距離センサの校正を自律走行体の向きを変えずに短時間で行う。
【解決手段】バッテリー及びこのバッテリーの充電用受電端子10aを設けた略円形の自律走行体1と、この自律走行体の受電端子と接触する充電用送電端子37aを設け、この送電端子から送電してバッテリーを充電する充電台31とからなり、充電台は、前部が略半円形状の側壁体36と、側壁体の壁面から校正に必要な所定距離だけ離れるように駆動輪3a,3bの位置決めを行う凹部35a,35bとを設け、自律走行体1は、複数の超音波送信部5a〜9aと、複数の超音波受信部5b〜9bと、送信部からの超音波パルスが側壁体に反射して超音波受信部が受信するまでの時間を計時する第1の計時手段53と、この計時手段の計時情報に基づいて算出した距離x0と設定された距離xとのズレを校正する第1の校正手段54を設けている。
(もっと読む)
コンパクト砲撃体位置特定システムと方法
超音速発射体の砲撃体を位置特定するためのシステムと方法が記載される。砲口爆風信号は、追求も必要もされない。システムは、少なくとも2つのセンサを使用し、各センサは、3軸加速度計を有する。センサは、少なくとも1mの間隔が空けられ、約1センチメートルの直径を有する。各センサの3つの加速度計信号は、圧力勾配を表わし、衝撃波到着角度単位ベクトル、衝撃波到着時刻、およびピーク圧力を見出すために処理される。センサは、衝撃波の高周波特性において最大感度を有し、一方で周囲ノイズの低周波特性に対する感度が比較的低いため、ノイズ信号がこの感知方法で誤検出を生じることはめったにない。  (もっと読む)
(もっと読む)
目標体運動解析方法及び装置
【課題】 受波センサ位置の誤差によって生じる目標体の状態量の推定値の誤差を抑制できる目標体運動解析方法及び装置を提供する。
【解決手段】 本発明は、目標体から放射される信号を、目標体と相対的に運動可能な観測体に取り付けた、空間的に離れた3個以上の受波センサで受信し、目標体の位置や速度などの状態量を推定する目標体運動解析方法及び装置に関する。そして、各受波センサ間の信号到来時間差の測定結果である観測時間差時系列を得、この観測時間差時系列に対して、推定誤差を最小とする最適化手法を用いて、目標体の状態量を推定し、観測時間差時系列、及び、目標体について得られた状態量の推定結果から、推定誤差を最小とする最適化手法を用いて、少なくとも一部の受波センサの位置を推定し、推定されたセンサ位置に、該当する受波センサの位置を補正することを特徴とする。
(もっと読む)
81 - 100 / 125
[ Back to top ]