
Fターム[5J084BA04]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学系 (4,875) | 投光系に関するもの (2,428) | 光源の種類に関するもの (1,162) | レーザ光源 (1,039) | 半導体レーザ (523)
Fターム[5J084BA04]に分類される特許
141 - 160 / 523
距離測定装置
【課題】距離測定装置に入射した光が前方の搬送台車からの反射光であるか否かを高精度で識別でき、誤検知による搬送台車の誤停止等を解消できる距離測定装置を提供する。
【解決手段】軌道に沿って走行する搬送台車の前部に、変調された測定光を平面状に走査する走査部と、走査部で走査された測定光と検出物からの反射光との時間遅れから検出物までの距離を算出する距離演算部とからなる測距装置を配置し、測距装置により前方を走行する搬送台車の後部に配置された再帰性反射部材からの反射光に基づいて搬送台車間の車間距離を検知する距離測定装置であって、走査部により走査された測定光の複数の走査角度と、距離演算部により算出された各走査角度に対応する距離と、各走査角度に対応する反射光の強度のうち、何れか二つの相関関係に基づいて、再帰性反射部材からの反射光であるか否かを識別する識別部を備える。
(もっと読む)
距離画像取得装置

【課題】ファイババンドル型イメージガイドの屈曲に起因して距離画像の各画素間に相対的な誤差が生じることを抑制することが可能な距離画像取得装置を提供する。
【解決手段】距離画像取得装置1は、可撓性外装体3と、光源21と、第1光ガイドファイバ7と、第2光ガイドファイバ9と、反射光を受光し、基端面11Tから出射させるファイババンドル型イメージガイド11と、光源21の出射光の光行路を変更し、自己校正光21Eとしてファイババンドル型イメージガイド11に入射させる光行路変更部材15と、第1光伝搬遅延時間に対応する第1出力信号を出力する距離画像センサ23と、測定対象物33の距離画像を演算する信号処理部25とを備える。信号処理部25は、自己校正光21Eを受光した距離画像センサ23の第2出力信号に基づき、第2光伝搬遅延時間を演算し、これに基づき複数の画素ごとに距離画像を校正する。
(もっと読む)
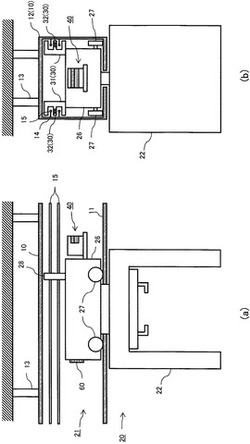
フォームファクタが小さいサイズセンサ
本明細書で開示される主題は、モバイル機器から遠隔の物体までの距離を測定すること、または遠隔の物体のサイズを測定することに関する。 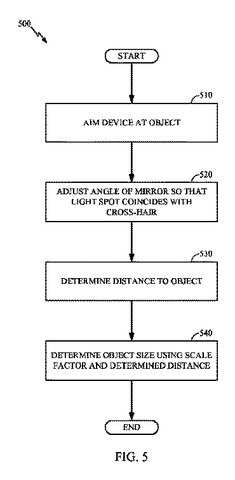 (もっと読む)
(もっと読む)
計数装置、物理量センサ、計数方法および物理量計測方法
【課題】少ない計算量で計数誤差を補正する。
【解決手段】振動周波数計測装置は、半導体レーザ1を発振させるレーザドライバ4と、半導体レーザ1の出力を電気信号に変換するフォトダイオード2の出力に含まれる干渉波形を数える計数装置7と、計数装置7の計数結果から物体10の物理量を求める演算装置8とを有する。計数装置7は、一定の計数期間における干渉波形の周期を測定し、この測定結果から干渉波形の周期の平均値を代表値として算出し、測定した1周期を1つの信号として計数すると共に、測定した周期が代表値の(n+0.5)倍以上(n+1.5)倍未満の場合は、計数の結果にnを加算することを、計数期間中の周期の全測定結果について行う。
(もっと読む)
ビーム照射装置およびレーザレーダ
【課題】シリンドリカルレンズ等のビーム整形用レンズを用いることなく、安定したビームプロファイルにて、ビームを目標領域に照射可能なビーム照射装置を提供する。
【解決手段】レーザ光を出射するレーザ光源410と、レーザ光源410から出射されたレーザ光が入射される収束レンズ430と、収束レンズ430を透過したレーザ光を目標領域において走査させるためのミラーアクチュエータ100を備える。レーザ光源410は、レーザチップのpn接合面が鉛直方向に平行となるように配される。レーザ光源410の発光部の鉛直方向に平行な方向の長さによって、目標領域におけるレーザ光の鉛直方向の長さが設定される。また、レーザ光に対する収束レンズ430の波面収差が0.15λrms以下に設定されている。
(もっと読む)
ビーム照射装置
【課題】シリンドリカルレンズ等のビーム整形用レンズを用いることなく、所望の形状のビームを目標領域に照射可能なビーム照射装置を提供する。
【解決手段】 レーザ光を出射するレーザ光源410と、レーザ光源410から出射されたレーザ光が入射される収束レンズ430と、収束レンズ430を透過したレーザ光を目標領域において走査させるためのミラーアクチュエータ100を備える。レーザ光源100は、レーザチップのpn接合面が鉛直方向に平行となるように配される。レーザ光源100の発光部の鉛直方向に平行な方向の長さによって、目標領域における前記レーザ光の鉛直方向の長さが設定される。
(もっと読む)
光学式測距センサ、および、それを搭載した電子機器
【課題】小型,高性能であり、リフローやフロー半田による実装が可能な安価な光学式測距センサを提供する。
【解決手段】基板11上の発光素子12と受光素子13および信号処理部14とを透光性樹脂で封止して成る樹脂形成体15,16を、遮光性樹脂で一体成形して樹脂形成体17を形成し、樹脂形成体17の上面および両側面を熱硬化性樹脂のレンズ19,20が設けられた金属性のレンズ板21で覆って、光学式測距センサを構成している。また、レンズ板21の下端部をGND端子としている。こうして、カーボン入り熱可塑性樹脂のレンズ付きケースを用いる場合よりも耐熱性を高めて、半田付けにより確実に実装することができる。また、レンズ板21に凸状部21aを設けたので、発光側からの光が受光側レンズ20に直接入射するのを防止できる。また、基板11を用いたので、樹脂封止の際に裏側まで樹脂成形する必要がなく厚さを薄くできる。
(もっと読む)
SMIセンサを動作させる方法および対応のセンサ装置
本発明は、自己混合干渉センサを動作させる方法、および対応の自己混合干渉センサ装置に関するものである。この方法では、レーザーが周期的にレーザーパルスを発し、そのレーザーパルスの後に、そのレーザーパルスよりも低い振幅を有するレーザー放射の放射期間が後続するよう、装置のレーザー1が制御される。対象物3で反射された後のパルスが、低い振幅を有するレーザー放射の放射期間中においてレーザー1に再入射するよう、レーザーパルスのパルス幅が選択される。対応のSMI信号は、増強させられた信号対雑音比を有する。  (もっと読む)
(もっと読む)
計数装置、物理量センサ、計数方法および物理量計測方法
【課題】計数誤差を補正する。
【解決手段】振動周波数計測装置は、半導体レーザ1を発振させるレーザドライバ4と、半導体レーザ1の出力を電気信号に変換するフォトダイオード2の出力に含まれる干渉波形を数える計数装置7と、計数装置7の計数結果から物体10の物理量を求める演算装置8とを有する。計数装置7は、一定の計数期間における干渉波形の半周期の数を数え、干渉波形の半周期を測定し、この測定結果から計数期間中の干渉波形の半周期の度数分布を作成し、この度数分布から干渉波形の半周期の分布の代表値を算出し、代表値の0.5倍未満である半周期の数の総和Nsと、代表値の2n倍以上(2n+2)倍未満である半周期の数の総和Nwnとを求め、これらの度数NsとNwnに基づいて計数結果を補正する。
(もっと読む)
レーザー距離計
【課題】小型化と測定距離の長大化を両立させたレーザー距離計を提供する。
【解決手段】レーザー距離計100は、線状の発光部10aから当該発光部10aの長手方向の発散角より短手方向の発散角が大きい光を放射する光源10と、この光を目標物体に投射し、当該目標物体で反射した反射光を集光する対物レンズ30と、光源10と対物レンズ30との間に配置され、光源10から放射された光を透過する送光領域21a、及び、目標物体で反射して対物レンズ30で集光された反射光を反射する受光領域21bからなる部分反射面21を有する部分反射部材20と、この部分反射面21の受光領域21bで反射した反射光を受光する受光素子40と、を有し、光軸方向から見たときに、光源10に対して部分反射部材20を、発光部10aの長手方向に対して送光領域20aの長手方向が略直交するように配置する。
(もっと読む)
測距装置および測距方法
【課題】被測定物までの距離の測定結果のバラツキを抑制する。
【解決手段】測定制御部71は、複数の光出力レベルの測定光を用いて、各光出力レベル毎に被測定物までの距離の測定処理を所定の回数ずつ実行するように、測距装置1の各部を制御する。統計処理部83は、所定の回数の測定処理において、受光した光の強度を示す受光信号の所定のサンプリング周期毎の値が所定の閾値以上となる回数を各所定の時間毎にカウントすることにより得られる度数分布を、各光出力レベル毎に作成する。選択部72は、各光出力レベルに対する度数分布の中から、被測定物までの距離の演算に用いる度数分布を選択する。演算部73は、選択された度数分布を用いて、被測定物までの距離を演算する。本発明は、例えば、被測定物までの距離を測定する測距装置に適用できる。
(もっと読む)
目標物体を検出するためのドア感知システム
【課題】外部での適用例などに応用する際の使用に適した光スキャナ装置を提供すること、また、長い使用期間にわたって適切な動作が確保される光スキャナ装置を提供することにある。
【解決手段】目標物体(56)の距離範囲及び角方向を計測するための光スキャナ装置(10)であって、光パルスを送信するようになされたパルス源(12)と、この送信光パルスを反射し且つ可変掃引方向に掃引面(15)内部の掃引区域を横切って掃引するようになされた送信偏向手段(20)と、掃引面(15)内で反射された受信光パルスを検出するようになされた光検出手段(42)と、掃引面(15)内で反射された光パルスを反射し且つ反射された光パルスを光検出手段(42)に再誘導するようになされた受信偏向手段(24)と、光遮断手段(32)を備える。
(もっと読む)
距離画像処理システム
【課題】 距離画像センサの位置調整を容易に行うことのできる距離画像処理システムを提供する。
【解決手段】 所定の被測定対象の距離値を検出する距離画像センサ1と、距離画像センサ1から入力される各画素の距離値に基づいて生成された距離画像から特徴部を抽出する画像処理回路46を備えた画像データ処理装置2と、を備え、画像処理回路46は、調整しようとする距離画像センサ1から入力される距離値に基づいて生成された距離画像から調整対象となる特徴部を抽出し、この調整対象となる特徴部と、あらかじめ抽出された基準となる特徴部とを比較し、その位置の誤差を演算するように構成されている。
(もっと読む)
レーザスキャンセンサ
【課題】遠方の人体を確実に検知するとともに、測定方向によって測定距離範囲が比較的近いところに限定される場合などにはカバーが汚れているとの不用意な警告を抑止し、カバー全体で汚れ方にむらがある場合などにも適切な警告を行うことが可能なレーザスキャンセンサを提供する。
【解決手段】レーザスキャンセンサ100は、レーザ距離計110と、スキャン機構120と、データ取得部130と、汚れ判定部140と、警告出力制御部150と、メモリ160とを備えている。レーザ距離計110は開口部を有する筐体101の内部に配置されており、その開口部はレーザ光が透過可能なレンズカバー116で覆われている。汚れ判定部140において受光レベルとの大小比較を行う所定閾値を、測定方向毎の最大検知距離情報に基づいて変更する。
(もっと読む)
空間情報検出装置
【課題】環境光や周囲光の影響を受けることなく物体までの距離が測定可能範囲外であるときに検出した空間情報を無効にすることで誤検出を防止する。
【解決手段】発光源1が対象空間に投光し、受光センサ2では規定の受光期間の電荷を集積し、さらに受光期間よりも長い蓄積期間に亘って蓄積した電荷を取り出す。発光源1の光出力は、2値の信号値の継続期間がそれぞれ単位期間の整数倍の期間となるように蓄積期間において乱数的に発生させた方形波信号で変調される。受光センサ2の受光期間は、変調信号に基づいて生成されたタイミング信号で規定される。距離演算部6は、タイミング信号に対応する電荷量を用いて物体までの距離を算出する。正誤判断部7は、2種類のタイミング信号を用いて得られる2種類の電荷量の差分を評価値に用い、評価値を用いて物体までの距離が測定可能範囲外と判断したときに空間情報を無効にする。
(もっと読む)
光測距装置
【課題】霧などの外乱の中に測定対象物が存在する場合であっても、この測定対象物を見落としなく検出できる光測距装置を提供する。
【解決手段】受光素子の検出信号のレベルが閾値に到達した時点を受光タイミングとして検出する立上がり回路と、受光素子の検出信号をフィルタリングした後の信号のゼロクロス点を受光タイミングとして検出する共振回路とを備え、前記立上がり回路の閾値を、霧などの外乱からの反射光について受光タイミングを検出しないように設定する。そして、両回路が同じ受光タイミングを検出した場合には、光量に基づいてより高い精度を示す回路を選択して距離データを出力させる。また、共振回路による受光タイミングの検出の後で、立上がり回路が受光タイミングを検出した場合は、立上がり回路で検出された受光タイミングを選択して、距離データを出力させる。
(もっと読む)
空間情報検出装置
【課題】物体の反射率にかかわらず物体までの距離が測定可能範囲外であるときに検出した空間情報を無効にすることで誤検出を防止する。
【解決手段】発光源1が対象空間に投光し、受光センサ2では規定の受光期間の電荷を集積し、さらに受光期間よりも長い蓄積期間に亘って蓄積した電荷を取り出す。発光源1の光出力は、2値の信号値の継続期間がそれぞれ単位期間の整数倍の期間となるように蓄積期間において乱数的に発生させた方形波信号で変調される。受光センサ2の受光期間は、変調信号に基づいて生成されたタイミング信号で規定される。距離演算部6は、タイミング信号に対応する電荷量を用いて物体までの距離を算出する。正誤判断部7は、2種類のタイミング信号を用いて得られる2種類の電荷量の差分を正規化して評価値に用い、評価値を用いて物体までの距離が測定可能範囲外と判断したときに空間情報を無効にする。
(もっと読む)
距離計測装置とその距離計測装置に用いられる受光装置
【課題】 対象物までの距離を正確に計測することができる距離測定装置、及びその距離測定装置で用いられる受光装置を提供する。
【解決手段】 距離計測装置10は、照射部4と受光装置50を備える。照射部4は、対象物30に向けて照射光20を照射する。受光装置50は、受光部60と演算部70を備える。受光部60は、対象物30で反射した反射光40を受光して電気信号に変換する。演算部70は、照射光20と反射光40に基づいて対象物30までの距離を演算する。演算部70は、計時器2と光量測定器12と距離データ計算器16を備える。計時器2は、照射された照射光20が対象物30で反射して受光部60に至るまでの時間を計測する。光量測定器12は、反射光40の光量を測定する。距離データ計算器16は、計時器2で計測された時間と光量測定器12で測定された光量を利用して、対象物30までの距離データを出力する。
(もっと読む)
光測距装置
【課題】人間の眼の保護を図りながら、測距動作を継続できる光測距装置を提供する。
【解決手段】測距モードとして、安全モードと高精度モードとを備える。前記安全モードは、被曝放出レベルが最大許容露光レベルMPEよりも小さくなる「レーザ製品の安全基準」(JIS C 6802)のクラス1に相当するモードである。一方、高精度モードは、安全モードに比べてレーザ投光頻度を上げたり、走査振幅を絞ったりするなどの設定により、被曝放出レベルが最大許容露光レベルより高い、安全基準のクラス3Rに相当するモードである。ここで、測距動作で得た距離のデータと反射光量のデータとから、至近距離に人間の眼が存在することが検出された場合、高精度モードによるレーザ放射を停止させ、安全モードでレーザ放射を行わせる。
(もっと読む)
位置検出装置
【課題】位置検出に伴う計算量を削減し、処理の高速化及び装置の低コスト化を図る。
【解決手段】一対の画像からなるステレオ画像を所定の時間間隔で取得する画像取得部11と、前記ステレオ画像のうちの一方を基準画像、他方を比較画像として、該基準画像内の検出対象領域にマッチングする前記比較画像内のマッチング領域を探索する探索部12と、前記基準画像内の検出対象領域の位置及び探索部12により探索された比較画像内のマッチング領域の位置から求まる視差に基づいて、当該ステレオ画像内に存在する物体の撮影地点からの距離を算出する距離算出部13と、距離算出部13により算出された距離に応じて、当該ステレオ画像の次に取得されるステレオ画像についての探索部12による前記比較画像内の探索範囲を変更する探索範囲変更部14とを備える位置検出装置である。
(もっと読む)
141 - 160 / 523
[ Back to top ]