
Fターム[5J084BA04]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学系 (4,875) | 投光系に関するもの (2,428) | 光源の種類に関するもの (1,162) | レーザ光源 (1,039) | 半導体レーザ (523)
Fターム[5J084BA04]に分類される特許
161 - 180 / 523
光波距離計

【課題】温度位相ドリフトを低減するとともに誤差を小さくしながら遠距離測定できる光波距離計を提供する。
【解決手段】複数の主変調周波数F1、F2、F3で変調された第1の発光素子13と、前記各主変調周波数それぞれに近接した複数の傍変調周波数F1−Δf1、F2−ΔF2、F3−Δf3で変調された第2の発光素子14と、両発光素子から出射された光を受光する第1、第2の受光素子40、50と、第1の受光素子に接続された第1の周波数変換器群42、44、46と、第2の受光素子に接続された第2の周波数変換器群52、54、56とを備え、主変調周波数及び傍変調周波数は、それぞれの中で最も周波数の低いものF3、F3−Δf3と近接した周波数の主変調周波数F3−F4及び傍変調周波数F3−F4−Δf4に変更でき、近接法によって近接した2つの主変調周波数の差となる変調周波数F4を用いた場合の目標反射物22までの距離も算出する。
(もっと読む)
計数装置、物理量センサ、計数方法および物理量計測方法

【課題】計数誤差を補正する。
【解決手段】張力・速度計測装置は、半導体レーザ1を発振させるレーザドライバ4と、半導体レーザ1の出力を電気信号に変換するフォトダイオード2の出力に含まれる干渉波形を数える計数装置7とを有する。計数装置7は、計数期間中の干渉波形の周期を測定し、この測定結果から計数期間中の干渉波形の周期の度数分布を作成し、この度数分布から、階級値と度数との積が最大となる階級値を干渉波形の周期の代表値T0とし、代表値T0の0.5倍未満である階級の度数の総和Nsと、代表値T0の(n+0.5)倍以上(n+1.5)倍未満である階級の度数の総和Nwnとを求め、これらの度数NsとNwnに基づいて計数結果を補正する
(もっと読む)
空間情報検出装置
【課題】複数台の空間情報検出装置が存在する場合でも、独立して空間情報を検出する。
【解決手段】空間情報検出装置は、対象空間に投光する発光源2と、発光源2から投光する光の強度を変調する発光制御部3と、対象空間からの受光光量に応じた電荷を生成する光検出素子1と、光検出素子1の出力から対象空間に存在する物体Obまでの距離を求める距離演算部4とを備える。発光制御部3は、投光期間と休止期間とを設けるように発光源2を制御する。距離演算部4は、休止期間の電荷から環境光成分における変動成分の存否を判定する干渉判定部を備える。距離演算部4は、光検出素子1が受光する環境光成分のうち特定の2種類の位相区間の差分の積算値を所定の積分時間において求め、干渉判定部において積算値の差分が環境光成分の影響を受けていると判定した場合は当該差分を採用せず、差分が閾値以下の場合に当該差分を用いて空間情報としての距離を求める。
(もっと読む)
ミラーアクチュエータおよびビーム照射装置
【課題】回動軸における摩擦や不要な制動力を抑制でき、ミラーの回動性能を高めることができるミラーアクチュエータおよびこのミラーアクチュエータを搭載したビーム照射装置を提供する。
【解決手段】ミラーアクチュエータ100は、マグネットユニット130と、マグネットユニット130に固定された支軸111と、支軸111に回動可能に軸支されたチルトユニット110と、チルトユニット110に固定され支軸111に垂直な支軸125と、支軸125に回動可能に軸支されたパンユニット120と、パンユニット120に装着されたミラー140とを備える。チルトユニット110とパンユニット120は、それぞれ、支軸111と支軸125を1ヵ所で軸受けする軸受部112と軸受部122を有する。
(もっと読む)
光波距離計
【課題】測定時間を短縮するとともに、電気部品の温度位相ドリフトを低減させた光波距離計を提供する。
【解決手段】複数の主変調周波数(F1、F2)で変調された光を出射する第1の発光素子(13)と、各主変調周波数それぞれに近接した傍変調周波数(F1−Δf1、F2−Δf2)で変調された光を出射する第2の発光素子(14)と、両発光素子から出射された光を受光する第1及び第2の受光素子(40、48)と、第1の受光素子に接続された第1の周波数変換器群(42、44)と、第2の受光素子に接続された第2の周波数変換器群(50、52)とを備える。第1の発光素子から出射された光は2つに分けられ、一方は目標反射物(22)までを往復する測距光路(23)を経て第1の受光素子に入射し、他方は第1の参照光路(26)を経て第2の受光素子に入射し、第2の発光素子から出射された光は2つに分けられ、一方は第2の参照光路(31)を経て第2の受光素子に入射し、他方は第3の参照光路(29)を経て第1の受光素子に入射する。
(もっと読む)
物体検知装置
【課題】距離センサの視野内にドアが存在する場合でも、監視対象である物体の状態をドアの移動と分離して判断可能にする。
【解決手段】距離センサAは、視野領域に存在する物体までの距離を計測して距離画像を生成する装置であり、ドアにより開閉される開口部の上方に配置され視野領域が下方に設定される。距離センサAの視野領域には、走行駆動されて開口部を開閉するドアが含まれる。領域規定手段9は、ドアが出入する領域を含む第1の監視領域と、ドアパネル間の隙間の領域である第2の監視領域と、開口部の外側で開口部から規定範囲内である第3の監視領域とを規定する。また、領域規定手段9は、ドアの開閉の動作に伴って各監視領域の大きさを変化させる。判断手段10は、各監視領域内における物体の存否を判断し、検知出力手段11は、判断手段10の判断結果に応じた出力信号を外部に出力する。
(もっと読む)
パルス光による光学式距離計
飛行時間測定に基づいた光学式距離計は、オブジェクト(70)に向ってパルス光を照射し、オブジェクトからの反射光を受信し、受信器はフォトンカウントモードで動作して検出されたフォトンに対してパルスを生成する。受信器上でフォトン検出の可変確率が存在し、且つ、コントローラ(370、380、390;365、470、475、380、390;570、580、590、390)は光レベルに基づいて、受信器のフォトン検出確率を制御する。光レベルに基づいて検出確率を制御することによって、光学部品を使用する経費を伴うことなく、受信器は増加したダイナミックレンジを有する。これは、検出確率が制御される間、受信器がフォトンカウントモードにあるので、非常に弱い信号を検出する間であっても適用することができる。光レベルは受信器自身の出力によって、或いは受信器の外部の別の検出器によって、表すことができる。 (もっと読む)
測距装置
【課題】不要なポインタ光の送光を止める測距装置を得る。
【解決手段】測距装置は、対象物に向けて測距用の光を送光する第1送光手段4と、測距開始操作信号に応じて、測距用の光が対象物との間を往復する時間に基づいて対象物までの距離を測る測距手段1,2と、対象物に向けて測距用の光と異なるポインタ光を送光する第2送光手段4と、第1送光手段4、第2送光手段4および測距手段1,2をそれぞれ制御する制御手段1とを備え、制御手段1は、第2送光手段4からポインタ光が送光されている状態で測距開始信号を受けると、ポインタ光の送光を停止させてから距離測定を開始させる。
(もっと読む)
測距装置
【課題】S/N比が悪くても予備測定を適切に行う測距装置を提供すること。
【解決手段】測距装置は、対象物に向けて光を送光する送光手段4と、対象物で反射された光を受光する受光手段5と、送光から受光までの時間に基づいて対象物までの距離を演算する演算手段1,2と、本測定の前に予備測定を行い、該予備測定値を用いて本測定を行うように送光手段4、受光手段5および演算手段1,2をそれぞれ制御する制御手段1とを備える。そして、予備測定時の制御手段1は、演算手段1,2によって距離演算値を所定回数だけ演算するように送光、受光および演算を繰返し制御し、所定回数だけ演算して得た複数の距離演算値に基づいてヒストグラムを求め、ヒストグラムの度数のうち最大度数が第1判定閾値P1以上の場合は、最大度数の階級に含まれる距離演算値を用いて予備測定値を得る。
(もっと読む)
距離画像撮影装置
【課題】正確な距離画像の撮影を可能とする距離画像撮影装置を提供する。
【解決手段】撮像空間内に向けて光波を照射し、当該光波を照射された当該撮像空間内の物体からの反射波の伝搬遅延時間に基づいて物体までの距離を示す距離画像を撮像する距離画像撮影装置であって、異なる波長帯の複数の光波を他の物体に向けて発光する光波照射手段と、複数の光波の反射波を波長帯毎に受光し、各反射波の受光量を検出する受光手段と、複数の光波各々の伝搬遅延時間を算出する遅延時間算出手段と、受光した反射波の受光量の大きさを各々比較して、当該受光量の大小を判定する受光量判定手段と、少なくとも、受光手段における受光量が最も大きい波長帯の光波の伝搬遅延時間に基づいて物体までの距離を算出する距離算出手段と、距離算出手段により算出された物体までの距離に基づいて距離画像を生成する距離画像生成手段とを備える、距離画像撮影装置。
(もっと読む)
走査型測距装置
【課題】走査効率の高い走査型測距装置を提供する。
【解決手段】投受光部1aから投光された測定光は鏡面2aによって反射され、筐体の透過部6を通過し、測定対象空間に照射される。測定対象空間に測定対象物があると、測定対象物からの反射光は、透過部6を再度通過し、鏡面2aによって反射され、投受光部1aにて受光されることで測定対象物の位置を測定する。また、同時に他方の投受光部1b、鏡面2bでも同様に他の測定対象物の位置を測定することにより測定効率を向上することができる。
(もっと読む)
測距方法及び車載測距装置
【課題】床面に近い位置に置かれた障害物を精度良く検知できる測距方法を提供する。
【解決手段】発光部から出力された測定光を所定周期で繰り返し走査して対象物からの反射光を受光部に導き、測定光と反射光の検出時間差に基づいて対象物までの距離を算出する測距装置を車両に取り付けて、走査面が測定対象平面と交差するように測定光を走査して、測定対象平面または対象物までの距離を算出し、所定の走査角度で算出された距離に基づいて測定対象平面に平行な仮想平面を生成し、各距離を仮想平面からの鉛直距離に換算し、換算した鉛直距離と当該鉛直距離に対応する測定対象平面上の測定光の走査位置との相関を表す近似線を算出し、換算した鉛直距離が当該近似線から求まる鉛直距離より所定の閾値以上短い値を示す走査位置に対象物が存在すると検知する各ステップを所定の走査周期毎に繰り返す。
(もっと読む)
測距装置
【課題】測距装置の利便性を向上させる。
【解決手段】測距装置11には、送光レンズ22乃至カラーフィルタ25からなる照準望遠光学系が設けられ、ユーザは、カラーフィルタ25から目標物を確認することができる。また、収納部37には、接眼部26に着脱可能な、特性の異なるカラーフィルタ25が複数格納されている。カラーフィルタ25は、各天候に対してまぶしさを軽減させ、かつコントラストを向上させる特性を有しているため、ユーザは、外部環境に適したカラーフィルタ25を接眼部26に装着することができる。このように、測距装置11に対して着脱可能な、互いに特性の異なるカラーフィルタ25を設けることで、測距装置11の利便性を向上させることができる。本発明は、ゴルフ用のレーザ距離計に適用することができる。
(もっと読む)
障害物検出方法及びレーザ距離測定装置
【課題】踏切内の溝に人が入り込んだとしても、障害物として検出し得る障害物検出方法及びレーザ距離測定装置を提供する。
【解決手段】レーザ光LTを投光する投光部1と、レーザ光LTを走査する走査部と、踏切内に存在する歩行者で反射して戻った反射レーザ光LRを受ける受光部2と、受光部2からの受光信号Srにより歩行者の計測データDを作成して発信する信号処理部3と、計測データDを受信して測定結果を出力する制御部6を備え、制御部6では、連続して取得する歩行者の計測データDを複数の高さの閾値で選別する処理と、高さの閾値による高さデータに基づいて歩行者を認識する処理を行う。
(もっと読む)
車両用電子安定プログラムのための、レーザダイオードをベースにした自己混合センサ
本発明は、簡単にした車両安定制御のための、レーザダイオードをベースにした自己混合レーザセンサに関する。自己混合レーザセンサから、車両のサイドスリップ角、前輪及び後輪スリップ角、ヨーレート並びに横方向加速度が、はっきりと導き出される。ヨーレート、旋回半径及びタイヤスリップ角の分析に基づく3つの基準が、アンダーステア又はオーバーステアの発生を検出するのに用いられ、これは、簡単にした車両用電子安定プログラムを可能にする。 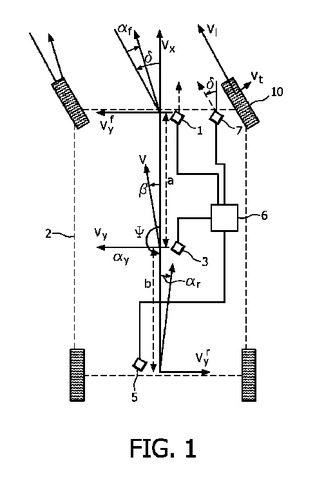 (もっと読む)
(もっと読む)
トランジットタイム原理に基づいて動作する光学センサ
【課題】トランジットタイム原理に基づいた光学センサに関し、仕切りスクリーンの検査を可能にする光センサの提供。
【解決手段】光学センサは、発光パルスを観察領域に放射するための光源と、前記発光パルスのビーム方向を、回転させるための回転装置と、前記観察領域における対象物により反射された光パルスを検知するための検知器と、前記センサの内部を周囲環境から離隔しておくための、透明な仕切りスクリーンを含むハウジングと、前記仕切りスクリーンの透光性をテストするためのテスト装置と、前記光源を制御し、前記検知器により検知された前記光パルスを評価し、且つ、対象物からの距離を、前記光パルスの測定されたトランジットタイムに基づいて決定するための、前記テスト装置と協働する制御及び評価ユニットとを含む。
(もっと読む)
レーザ測距装置
【課題】パルスのレーザ光を送信して目標物で反射したレーザ光を受信し、送信から受信までの経過時間から目標物までの距離を算出するレーザ測距装置において、より効率的な測距処理を可能にしたレーザ測距装置を提供する。
【解決手段】パルス毎に受信信号の最大ピーク値と送信から最大ピーク値に達するまでの時間をサンプリング周期の周期数として測定し、複数回の受信信号の最大ピーク値をそれぞれカウントした周期数が同じ数同士で積分し、最大の積算値が存在する周期数を導出し、この導出した周期数に相当する時間から目標物までの距離を演算する。最大ピーク値及び周期数の測定には高速に応答可能なアナログ回路を用いる。
(もっと読む)
張力・速度計測装置および方法
【課題】ウェブの種類によらずにウェブの張力を高精度に計測し、同時にウェブの速度を安価に計測する。
【解決手段】張力・速度計測装置は、搬送装置によって搬送中の物体であるウェブ11にレーザ光を放射する半導体レーザ1と、発振波長が増加する第1の発振期間と発振波長が減少する第2の発振期間のうち少なくとも一方が繰り返し存在するように半導体レーザ1を動作させるレーザドライバ4と、半導体レーザ1から放射されたレーザ光とウェブ11からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出するフォトダイオード2および電流−電圧変換増幅部5と、電流−電圧変換増幅部5の出力に含まれる干渉波形の数を数える信号抽出部7と、信号抽出部7の計数結果に基づいてウェブ11の速度および張力を算出する演算部8とを備える。
(もっと読む)
ビーム照射装置
【課題】目標領域におけるレーザ光の走査位置を示す信号を精度良く検出することにより、レーザ光の走査精度を高め得るビーム照射装置を提供する。
【解決手段】S/H回路34は、サンプルタイミングごとに入力電圧信号をホールドし、ホールド電圧信号を減算器35に出力する。減算器35は、入力電圧信号から、ホールド電圧信号を減算した減算電圧信号を、端子32bおよび比較回路36に出力する。A/D変換回路38は、減算電圧信号を、S/H回路34におけるサンプルタイミングに同期してデジタル信号に変換し、PSD処理回路7に出力する。こうすると、A/D変換回路38の分解能が有効に活用されるため、A/D変換回路38から入力される信号に基づいて信号演算回路7bにて位置検出信号を生成することにより、位置検出信号の精度が高められ得る。
(もっと読む)
光学式変位計
【課題】正確な計測結果を得ることが可能な光学式変位計を提供する。
【解決手段】時点t21,t22,t23において、X方向における光の走査位置が位置P12に一致し、時点t21a〜t21bの期間、時点t22a〜t22bの期間、時点t23a〜t23bの期間に露光が行われる。この場合、露光の開始時点と終了時点との中間の時点で、投光方向が所定の方向と一致する。すなわち、時点t21a〜t21の期間の長さと時点t21〜t21bの期間の長さとが等しく調整され、時点t22a〜t22の期間の長さと時点t22〜t22bの期間の長さとが等しく調整され、時点t23a〜t23の期間の長さと時点t23〜t23bの期間の長さとが等しく調整される。
(もっと読む)
161 - 180 / 523
[ Back to top ]