
障害物検出方法及びレーザ距離測定装置
【課題】踏切内の溝に人が入り込んだとしても、障害物として検出し得る障害物検出方法及びレーザ距離測定装置を提供する。
【解決手段】レーザ光LTを投光する投光部1と、レーザ光LTを走査する走査部と、踏切内に存在する歩行者で反射して戻った反射レーザ光LRを受ける受光部2と、受光部2からの受光信号Srにより歩行者の計測データDを作成して発信する信号処理部3と、計測データDを受信して測定結果を出力する制御部6を備え、制御部6では、連続して取得する歩行者の計測データDを複数の高さの閾値で選別する処理と、高さの閾値による高さデータに基づいて歩行者を認識する処理を行う。
【解決手段】レーザ光LTを投光する投光部1と、レーザ光LTを走査する走査部と、踏切内に存在する歩行者で反射して戻った反射レーザ光LRを受ける受光部2と、受光部2からの受光信号Srにより歩行者の計測データDを作成して発信する信号処理部3と、計測データDを受信して測定結果を出力する制御部6を備え、制御部6では、連続して取得する歩行者の計測データDを複数の高さの閾値で選別する処理と、高さの閾値による高さデータに基づいて歩行者を認識する処理を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、踏切内や敷地内における障害物(歩行者,侵入者などの移動体や置石,倒木など物体を含む)の有無を検出するのに利用される障害物検出方法及びレーザ距離測定装置に関するものである。
【背景技術】
【0002】
従来、上記した障害物検出方法に類するものとしては、例えば、特許文献1に開示される横断歩行者検出方法がある。この検出方法は、レーザ光を横断歩道上に走査して、このレーザ光の投光タイミング及び横断歩道上に存在する歩行者で反射して戻った反射レーザ光の受光タイミングにより飛行時間を計測して歩行者を検出する方法である。
この方法では、レーザ光の走査により計測したデータのうちの所定の高さ(例えば、地上30cm程度の高さ)以上の計測データを抽出することによって、歩行者や車両の検出を行っている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許3472815号
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記した従来の検出方法では、例えば、踏切内における歩行者や車両などの障害物の検出に用いた場合において、踏切内に形成された溝などの凹部や、遮断機脇の路面よりも低地の部位に人が入り込んだときに、その計測データが高さの閾値による選別処理から外れてしまい、検出漏れを生じる可能性があるという問題を有しており、この問題を解決することが従来の課題となっていた。
【0005】
本発明は、上述した従来の課題に着目してなされたもので、例えば、踏切内における歩行者や車両などの障害物の検出に用いた場合において、凹部や低地の部位に人が入り込んだりしたとしても、障害物として検出することができる障害物検出方法及びレーザ距離測定装置を提供することを目的としている。
【課題を解決するための手段】
【0006】
本発明の請求項1に係る発明は、測定エリアに向けて投光したレーザ光を走査し、このレーザ光の投光タイミング及び測定エリア内に存在する障害物で反射して戻った反射レーザ光の受光タイミングにより飛行時間を計測して、前記障害物を検出する障害物検出方法であって、レーザ光の走査毎に取得される前記障害物の三次元データに対して複数の高さの閾値で選別する処理を行い、この処理で抽出した複数の高さデータに基づいて前記障害物を認識する構成としたことを特徴としており、この障害物検出方法の構成を前述の従来の課題を解決するための手段としている。
【0007】
また、本発明の請求項2に係る障害物検出方法において、複数の高さの閾値は、測定エリア内に存在する凹部から任意に選択された凹部に少なくとも1つの閾値が含まれるように設定される又は測定エリア内に存在する凹凸に合わせて設定される構成としている。
さらに、本発明の請求項3に係る障害物検出方法は、あらかじめ取得した前記測定エリア内の地面形状データに基づいて該測定エリアの地面を多数の小エリアに細分化し、複数の高さの閾値は、前記細分化した小エリア毎に同じ高さでそれぞれ設定される構成としている。
【0008】
一方、本発明の請求項4に係るレーザ距離測定装置は、レーザ光を発する投光部と、この投光部から発したレーザ光を測定エリアで走査する走査部と、前記測定エリア内に存在する障害物で反射して戻った反射レーザ光を前記走査部を介して受ける受光部と、前記投光部にレーザ光の投光指令を発すると共に前記走査部による走査を制御する制御部と、この制御部から与えられるレーザ光の投光タイミング及び前記受光部から与えられる反射レーザ光の受光タイミングにより飛行時間を計測して、前記障害物の三次元データを取得する信号処理部を備え、前記制御部では、レーザ光の走査毎に取得される前記障害物の三次元データを複数の高さの閾値で選別する処理と、この処理で抽出した複数の高さデータに基づいて障害物を認識する処理を行う構成としたことを特徴としており、このレーザ距離測定装置の構成を前述の従来の課題を解決するための手段としている。
【0009】
また、本発明の請求項5に係るレーザ距離測定装置は、前記制御部において、複数の高さの閾値は、測定エリア内に存在する凹部から任意に選択された凹部に少なくとも1つの閾値が含まれるように設定される又は測定エリア内に存在する凹凸に合わせて設定される構成としている。
さらに、本発明の請求項6に係るレーザ距離測定装置は、前記制御部において、あらかじめ取得した前記測定エリア内の地面形状データに基づいて該測定エリアの地面が多数の小エリアに細分化され、複数の高さの閾値は、前記細分化した小エリア毎に同じ高さでそれぞれ設定される構成としている。
【0010】
本発明において、投光するレーザ光としては、半導体レーザや固体レーザやガスレーザなどを用いることができ、信号波形がパルス状や位相変調した正弦波状を成すレーザ光が使用される。
また、本発明の請求項3に係る障害物検出方法及び請求項6に係るレーザ距離測定装置において、あらかじめ取得した測定範囲内の地面形状データに基づいて地面を多数の小エリアに細分化する場合、小エリアのサイズは、本発明の適用場所や検出対象に基づいて決定する。
【0011】
本発明に係る障害物検出方法及びレーザ距離測定装置では、例えば、踏切内における歩行者や車両などの障害物の検出に用いた場合において、レーザ光の走査により連続して取得される三次元データに基づいて、踏切内の歩行者や車両の検出がなされる。
ここで、踏切内に形成された溝や段差や遮断機脇の路面よりも低地の部位などの凹部に人がいたとしても、複数設定された高さの閾値、例えば、溝や段差などの凹凸の部分毎に設定された高さの閾値による選別処理が三次元データに対して行われているので、凹部に入り込んだりした人を障害物として検出し得ることとなる。
【0012】
この際、踏切内の地面形状をあらかじめ取得して記憶しておき、この踏切内の地面形状データに基づいて踏切の路面を多数の小エリアに細分化し、これらの細分化した小エリア毎に同じ高さの閾値をそれぞれ設定した場合には、高さの閾値が踏切内の地面形状にほぼ沿うことになるので、踏切内で倒れた人や、這って侵入した人や、置石などの高さ寸法が大きくない障害物をも検出し得ることとなる。
【0013】
加えて、列車接近信号が発せられていない列車が来ないときに、踏切内の地面形状データを随時計測して更新するように成せば、立ち木の生長による枝の入り込みや、積雪による路面のかさ上げなどの環境変化に迅速に対応し得ることとなる。
【発明の効果】
【0014】
本発明の請求項1,2に係る障害物検出方法及び請求項4,5に係るレーザ距離測定装置では、上記した構成としたから、例えば、踏切内における歩行者や車両などの障害物の検出に用いた場合において、踏切内の溝や低地の部位などの凹部に人が入り込んだりしたとしても、障害物として検出することができるという非常に優れた効果がもたらされる。
また、本発明の請求項3に係る障害物検出方法及び請求項6に係るレーザ距離測定装置では、上記した構成としたから、同じく踏切内における歩行者や車両などの障害物の検出に用いた場合において、本発明の請求項1,2に係る障害物検出方法及び請求項4,5に係るレーザ距離測定装置と同じ効果が得られるのに加えて、踏切内で倒れた人や、這って侵入した人や、置石などの高さ寸法が大きくない障害物をも検出することができる。
【0015】
さらに、踏切内の地面形状データを随時計測して更新することで、生長した立ち木の枝が踏切内に入り込んだり、積雪により踏切内の路面がかさ上げしたりするなどといった環境の変化にも迅速に対応することが可能であるという非常に優れた効果がもたらされる。
【図面の簡単な説明】
【0016】
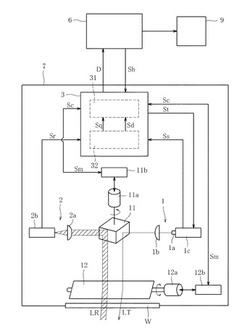
【図1】本発明の一実施例に係る障害物検出方法及びレーザ距離測定装置を示すブロック図である。
【図2】図1におけるレーザ距離測定装置の計測要領を示す斜視説明図(a)〜(e)である。
【図3】図1におけるレーザ距離測定装置による計測状況を示す側面説明図(a)及び平面説明図(b)である。
【図4】図1におけるレーザ距離測定装置の制御部における高さの閾値による選別処理要領説明図(a)〜(c)である。
【図5】本発明の他の実施例に係る障害物検出方法による計測状況を示す側面説明図(a)及び平面説明図(b)である。
【図6】図5の計測時における高さの閾値による選別処理要領説明図(a),(b)である。
【発明を実施するための形態】
【0017】
以下、本発明に係る障害物検出方法及びレーザ距離測定装置を図面に基づいて説明する。
[実施例1]
図1〜図4は、本発明に係る障害物検出方法及びレーザ距離測定装置の一実施例を示しており、この実施例では、本発明に係る障害物検出方法及びレーザ距離測定装置を踏切内における歩行者や車両などの障害物の検出に用いた場合を例に挙げて説明する。
【0018】
図1に示すように、このレーザ距離測定装置は、投光したレーザ光LTの反射光LRを受光して踏切内の歩行者や車両(測定エリア内の障害物)までの距離を測定するレーザ距離測定装置であって、レーザ光LTを投光する投光部1と、反射光LRを受光して受光信号Srを発信する受光部2と、受光信号Srから物体の測定距離を含む計測データ(三次元データ)Dを作成して発信する信号処理部3と、投光部1、受光部2及び信号処理部3を収容するレーザレーダヘッド7と、このレーザレーダヘッド7と離隔して配置されるとともに計測データDを受信して測定結果を出力する制御部6と、を有している。投光部1、受光部2及び信号処理部3を収容するレーザレーダヘッド7は、図2に示すように、地面Eに立設した支柱8の上端部に配置される。
【0019】
前記投光部1は、測定エリア内にレーザ光Lを発光して投光する機器である。かかる投光部1は、例えば、光源となるレーザダイオード1aと、レーザ光Lをコリメートする投光レンズ1bと、レーザダイオード1aを操作するLDドライバ1cとから構成される。LDドライバ1cは、信号処理部3からのトリガー信号Stに基づいてレーザ光Lを発光するようにレーザダイオード1aを操作し、レーザ光Lの投光と同時にパルス状の投光同期信号Ssを信号処理部3に発信する。なお、投光同期信号Ssは、トリガー信号Stにより代用するようにしてもよい。
【0020】
図1において、投光レンズ1bを透過したレーザ光LTは、回転駆動されるポリゴンミラー11と回動駆動される平面ミラー12とにより構成される走査部の光学系により、略水平方向及び略鉛直方向に走査されるようになっている。ポリゴンミラー11は、例えば、6面体の4側面が鏡面化されており、対峙する2面(上下面)の中心を回転軸としてモータ11aにより回転されるように構成されている。モータ11aは、モータドライバ11bにより操作される。平面ミラー12は、例えば、モータ12aにより回動される回動軸の側面に接続されている。モータ12aは、モータドライバ12bにより操作される。また、モータドライバ11b,12bは、信号処理部3からの制御信号Smにより制御されるとともに、スキャン角度やスイング角度等の投光条件信号Scを信号処理部3に発信する。なお、かかる光学系は単なる一例であり、図示した構成に限定されるものではない。
【0021】
前記受光部2は、測定エリア内に投光されたレーザ光LTの反射光LRを受光する機器である。ここでは、投光部1と受光部2と個別に設けて投光軸と受光軸とがずれるように構成しているが、投光軸と受光軸とが一致するように投光部1と受光部2が一体に形成されていてもよい。かかる受光部2は、例えば、反射光LRを集光する受光レンズ2aと、集光された反射光LRを受光して電圧に変換するフォトダイオード等の光電変換素子や増幅器等を有する受光部本体2bとから構成される。レーザレーダヘッド7の前面の投光窓Wを透過した反射光LRは、平面ミラー12及びポリゴンミラー11を介して受光レンズ2aに導かれる。そして、反射光LRを受光した受光部本体2bは、電圧値に変換された受光信号Srを信号処理部3に発信する。
【0022】
前記信号処理部3は、測定距離、受光強度、投光条件等のデータを含む計測データDを発信する機器である。信号処理部3は、主信号処理部31と時間計測部32とを有する。
主信号処理部31は、トリガー信号Stの発信、モータドライバ11b,12bの制御信号Smの発信、スキャン角度やスイング角度等の投光条件信号Scの受信、時間計測部32からの信号(受光強度信号Sq及び飛行時間信号Sd)の受信、計測データDの発信等の処理を行う。
【0023】
一方、時間計測部32は、投光同期信号Ssの受信により時間の計測を開始し、受光信号Srを受信した時間を把握する。したがって、時間計測部32では、投光されたレーザ光LTが、物体に反射して受光されるまでの飛行時間を計測することができる。
また、時間計測部32は、受光信号Srから所望の受光強度を有する受光信号Srを選択する弁別機能や、受光信号Srのうち飛行時間の短いものを除外するゲート機能を有していてもよい。かかる弁別機能やゲート機能により、ノイズを効率よく排除することができる。
【0024】
そして、時間計測部32は、弁別機能やゲート機能を通過した受光信号Srの受光強度信号Sq及び飛行時間信号Sdを主信号処理部31に発信する。主信号処理部31は、飛行時間信号Sdを(光の速度)×(飛行時間)/2の計算式により距離データに変換し、受光強度信号Sq、スキャン角度やスイング角度等の投光条件信号Sc等と共に計測データDを作成し、制御部6に計測データDを発信する。
【0025】
前記制御部6は、画像処理や、故障診断や、誤差補正を行うコンピュータであり、計測データDを受信して測定結果をディスプレイ、プリンタ、警報機等の出力機器9に出力する。
また、この制御部6は、ポリゴンミラー11のスキャン角度やスキャン速度、平面ミラー12のスイング角度やスイング速度、レーザ光Lのトリガー信号Stの発信タイミング等の条件設定を行い、これらの制御条件Shを信号処理部3に発信している。この制御部6は、通常レーザレーダヘッド7から離れた部位に配置される。
【0026】
さらに、制御部6は、踏切内に形成されている溝や段差、低地などの部分毎に高さの閾値を設定する処理と、計測データDに対する複数の高さの閾値による選別処理と、これらの高さの閾値によって選別された高さデータに基づいて障害物を歩行者や車両M1,M2として認識する処理を行うものとなっている(図2(d),(e))。
こうような構成を有するレーザ距離測定装置では、まず、図3に示すように、投光部1から投光したレーザ光LTを踏切内の測定エリアに走査して、計測データDを取得する。
【0027】
この際、踏切内の路面Eには、制御部6により所定高さ(例えば、路面E上30cm程度の高さ)の閾値Aが設定されており、レーザ光LTを1走査する毎に計測データDに対する高さの閾値Aによる選別処理を行って、所定高さ以上の計測データDを抽出することにより、図4(a)に示すように、踏切内における障害物である歩行者T2〜T6を検出する。
【0028】
なお、図2(d)のX方向のような左右方向にレーザ光LTを1回振ることを1スキャンと称し、このスキャンを繰り返しながら図2(d)のY方向のような前後方向にレーザ光LTを振って測定エリアを一通り走査することを1フレームと称した場合、上述した閾値A以上の計測データDを抽出する処理は、1スキャン毎に行ってもよいし、1フレーム毎に行ってもよい。
【0029】
ここで、踏切内の路面Eに対応する閾値Aによって抽出された検出結果Daには、踏切内の溝E1に入り込んだ二人の歩行者T1,T2のうちの背丈が高い歩行者T2のデータは含まれているが、背丈の低い歩行者T1のデータ(図4(a)に破線で示す部分)は含まれていない。
この溝E1には、制御部6により溝E1の底面に対応する閾値Bが設定されており、溝E1にレーザ光LTを1走査する毎に計測データDに対する高さの閾値Bによる選別処理を行い、溝E1内における所定高さ以上の計測データDを抽出することにより、図4(b)に示すように、溝E1内における障害物である歩行者T1を検出する。この際も、閾値B以上の計測データDを抽出する処理は、1スキャン毎に行ってもよいし、1フレーム毎に行ってもよい。
【0030】
そして、この溝E1に入り込んだ背丈の低い歩行者T1のデータが反映された検出結果Dbと、溝E1に入り込んだ背丈の高い歩行者T2及び路面E上の歩行者T3〜T6のデータが反映された検出結果Daとを組み合わせれば、図4(c)に示すように、歩行者T1〜T6全員のデータが反映された検出結果Dcが得られるので、踏切内の溝E1に歩行者T1,T2が入り込んでいたとしても、これらの歩行者T1,T2を障害物として認識し得ることとなる。
【0031】
なお、ここでは、凹部である溝E1が1つの場合について説明したが、これに限定されるものではなく、測定エリア内に存在する複数の凹部から計測対象としたい1つ以上の凹部を任意に選択するようにしてもよい。また、複数の凹部を選択した場合には、それぞれに少なくとも1つの閾値が含まれるように閾値を設定することが望ましい。
[実施例2]
図5及び図6は、本発明に係る障害物検出方法の他の実施例を示しており、この実施例でも、本発明を踏切内における歩行者や車両などの障害物の検出に用いた場合を例に挙げて説明する。
【0032】
この実施例における障害物検出方法では、まず、上記したレーザ距離測定装置の運用前に、例えば、踏切に設置する際の初期設定時に、このレーザ距離測定装置を作動させて踏切内の路面Eの計測を行い、これで取得した段差を含む地面形状データを制御部6に記憶させる。
次いで、図5に示すように、投光部2から投光したレーザ光LTを踏切内に走査して、計測データDを取得する。
【0033】
この際、図6(a)に示すように、上記したようにしてあらかじめ取得した段差F1〜F6を含む踏切内の地面形状データFに基づいて、路面Eを段差F1〜F6(多数の小エリア)に細分化し、これらの細分化した段差F1〜F6毎にそれぞれ同じ高さの閾値Cを設定している。
したがって、レーザ光LTを1走査する毎に計測データDに対する高さの閾値Cによる選別処理を行えば、図6(b)に示すように、歩行者T1〜T6全員の検出結果Ddが得られるので、踏切内に多数の段差F1〜F6があったとしても、路面E上や段差F1〜F6上の歩行者T1〜T6を障害物として検出し得ることとなる。なお、閾値C以上の計測データDを抽出する処理は、1スキャン毎に行ってもよいし、1フレーム毎に行ってもよい。
【0034】
この障害物検出方法では、高さの閾値Cが踏切内の地面形状、すなわち、段差F1〜F6にほぼ沿うことになるので、踏切内で倒れた人や、這って侵入した人や、置石などの高さ寸法の大きくない障害物をも検出し得ることとなる。
加えて、列車接近信号が発せられていない列車が来ないときなどに、踏切内の地面形状データFを随時計測して更新するように成せば、立ち木の生長による枝の入り込みや、積雪による路面のかさ上げなどの環境変化に迅速に対応し得ることとなる。
【0035】
なお、上記した実施例では、本発明を踏切監視に適用した場合を例に挙げて説明したが、これに限定されるものではなく、他の適用例として、例えば、本発明を横断歩道の監視や敷地の監視に適用してもよい。
【符号の説明】
【0036】
1 投光部
2 受光部
3 信号処理部
6 制御部
11 ポリゴンミラー(走査部)
12 平面ミラー(走査部)
31 主信号処理部
32 時間計測部
A,B,C 高さ閾値
Da〜Dd 検出結果
E 路面(地面)
E1 溝(凹部)
F 地面形状データ
F1〜F6 段差
LR 反射レーザ光
LT 投光レーザ光
T1〜T6 歩行者(障害物)
【技術分野】
【0001】
本発明は、踏切内や敷地内における障害物(歩行者,侵入者などの移動体や置石,倒木など物体を含む)の有無を検出するのに利用される障害物検出方法及びレーザ距離測定装置に関するものである。
【背景技術】
【0002】
従来、上記した障害物検出方法に類するものとしては、例えば、特許文献1に開示される横断歩行者検出方法がある。この検出方法は、レーザ光を横断歩道上に走査して、このレーザ光の投光タイミング及び横断歩道上に存在する歩行者で反射して戻った反射レーザ光の受光タイミングにより飛行時間を計測して歩行者を検出する方法である。
この方法では、レーザ光の走査により計測したデータのうちの所定の高さ(例えば、地上30cm程度の高さ)以上の計測データを抽出することによって、歩行者や車両の検出を行っている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許3472815号
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記した従来の検出方法では、例えば、踏切内における歩行者や車両などの障害物の検出に用いた場合において、踏切内に形成された溝などの凹部や、遮断機脇の路面よりも低地の部位に人が入り込んだときに、その計測データが高さの閾値による選別処理から外れてしまい、検出漏れを生じる可能性があるという問題を有しており、この問題を解決することが従来の課題となっていた。
【0005】
本発明は、上述した従来の課題に着目してなされたもので、例えば、踏切内における歩行者や車両などの障害物の検出に用いた場合において、凹部や低地の部位に人が入り込んだりしたとしても、障害物として検出することができる障害物検出方法及びレーザ距離測定装置を提供することを目的としている。
【課題を解決するための手段】
【0006】
本発明の請求項1に係る発明は、測定エリアに向けて投光したレーザ光を走査し、このレーザ光の投光タイミング及び測定エリア内に存在する障害物で反射して戻った反射レーザ光の受光タイミングにより飛行時間を計測して、前記障害物を検出する障害物検出方法であって、レーザ光の走査毎に取得される前記障害物の三次元データに対して複数の高さの閾値で選別する処理を行い、この処理で抽出した複数の高さデータに基づいて前記障害物を認識する構成としたことを特徴としており、この障害物検出方法の構成を前述の従来の課題を解決するための手段としている。
【0007】
また、本発明の請求項2に係る障害物検出方法において、複数の高さの閾値は、測定エリア内に存在する凹部から任意に選択された凹部に少なくとも1つの閾値が含まれるように設定される又は測定エリア内に存在する凹凸に合わせて設定される構成としている。
さらに、本発明の請求項3に係る障害物検出方法は、あらかじめ取得した前記測定エリア内の地面形状データに基づいて該測定エリアの地面を多数の小エリアに細分化し、複数の高さの閾値は、前記細分化した小エリア毎に同じ高さでそれぞれ設定される構成としている。
【0008】
一方、本発明の請求項4に係るレーザ距離測定装置は、レーザ光を発する投光部と、この投光部から発したレーザ光を測定エリアで走査する走査部と、前記測定エリア内に存在する障害物で反射して戻った反射レーザ光を前記走査部を介して受ける受光部と、前記投光部にレーザ光の投光指令を発すると共に前記走査部による走査を制御する制御部と、この制御部から与えられるレーザ光の投光タイミング及び前記受光部から与えられる反射レーザ光の受光タイミングにより飛行時間を計測して、前記障害物の三次元データを取得する信号処理部を備え、前記制御部では、レーザ光の走査毎に取得される前記障害物の三次元データを複数の高さの閾値で選別する処理と、この処理で抽出した複数の高さデータに基づいて障害物を認識する処理を行う構成としたことを特徴としており、このレーザ距離測定装置の構成を前述の従来の課題を解決するための手段としている。
【0009】
また、本発明の請求項5に係るレーザ距離測定装置は、前記制御部において、複数の高さの閾値は、測定エリア内に存在する凹部から任意に選択された凹部に少なくとも1つの閾値が含まれるように設定される又は測定エリア内に存在する凹凸に合わせて設定される構成としている。
さらに、本発明の請求項6に係るレーザ距離測定装置は、前記制御部において、あらかじめ取得した前記測定エリア内の地面形状データに基づいて該測定エリアの地面が多数の小エリアに細分化され、複数の高さの閾値は、前記細分化した小エリア毎に同じ高さでそれぞれ設定される構成としている。
【0010】
本発明において、投光するレーザ光としては、半導体レーザや固体レーザやガスレーザなどを用いることができ、信号波形がパルス状や位相変調した正弦波状を成すレーザ光が使用される。
また、本発明の請求項3に係る障害物検出方法及び請求項6に係るレーザ距離測定装置において、あらかじめ取得した測定範囲内の地面形状データに基づいて地面を多数の小エリアに細分化する場合、小エリアのサイズは、本発明の適用場所や検出対象に基づいて決定する。
【0011】
本発明に係る障害物検出方法及びレーザ距離測定装置では、例えば、踏切内における歩行者や車両などの障害物の検出に用いた場合において、レーザ光の走査により連続して取得される三次元データに基づいて、踏切内の歩行者や車両の検出がなされる。
ここで、踏切内に形成された溝や段差や遮断機脇の路面よりも低地の部位などの凹部に人がいたとしても、複数設定された高さの閾値、例えば、溝や段差などの凹凸の部分毎に設定された高さの閾値による選別処理が三次元データに対して行われているので、凹部に入り込んだりした人を障害物として検出し得ることとなる。
【0012】
この際、踏切内の地面形状をあらかじめ取得して記憶しておき、この踏切内の地面形状データに基づいて踏切の路面を多数の小エリアに細分化し、これらの細分化した小エリア毎に同じ高さの閾値をそれぞれ設定した場合には、高さの閾値が踏切内の地面形状にほぼ沿うことになるので、踏切内で倒れた人や、這って侵入した人や、置石などの高さ寸法が大きくない障害物をも検出し得ることとなる。
【0013】
加えて、列車接近信号が発せられていない列車が来ないときに、踏切内の地面形状データを随時計測して更新するように成せば、立ち木の生長による枝の入り込みや、積雪による路面のかさ上げなどの環境変化に迅速に対応し得ることとなる。
【発明の効果】
【0014】
本発明の請求項1,2に係る障害物検出方法及び請求項4,5に係るレーザ距離測定装置では、上記した構成としたから、例えば、踏切内における歩行者や車両などの障害物の検出に用いた場合において、踏切内の溝や低地の部位などの凹部に人が入り込んだりしたとしても、障害物として検出することができるという非常に優れた効果がもたらされる。
また、本発明の請求項3に係る障害物検出方法及び請求項6に係るレーザ距離測定装置では、上記した構成としたから、同じく踏切内における歩行者や車両などの障害物の検出に用いた場合において、本発明の請求項1,2に係る障害物検出方法及び請求項4,5に係るレーザ距離測定装置と同じ効果が得られるのに加えて、踏切内で倒れた人や、這って侵入した人や、置石などの高さ寸法が大きくない障害物をも検出することができる。
【0015】
さらに、踏切内の地面形状データを随時計測して更新することで、生長した立ち木の枝が踏切内に入り込んだり、積雪により踏切内の路面がかさ上げしたりするなどといった環境の変化にも迅速に対応することが可能であるという非常に優れた効果がもたらされる。
【図面の簡単な説明】
【0016】
【図1】本発明の一実施例に係る障害物検出方法及びレーザ距離測定装置を示すブロック図である。
【図2】図1におけるレーザ距離測定装置の計測要領を示す斜視説明図(a)〜(e)である。
【図3】図1におけるレーザ距離測定装置による計測状況を示す側面説明図(a)及び平面説明図(b)である。
【図4】図1におけるレーザ距離測定装置の制御部における高さの閾値による選別処理要領説明図(a)〜(c)である。
【図5】本発明の他の実施例に係る障害物検出方法による計測状況を示す側面説明図(a)及び平面説明図(b)である。
【図6】図5の計測時における高さの閾値による選別処理要領説明図(a),(b)である。
【発明を実施するための形態】
【0017】
以下、本発明に係る障害物検出方法及びレーザ距離測定装置を図面に基づいて説明する。
[実施例1]
図1〜図4は、本発明に係る障害物検出方法及びレーザ距離測定装置の一実施例を示しており、この実施例では、本発明に係る障害物検出方法及びレーザ距離測定装置を踏切内における歩行者や車両などの障害物の検出に用いた場合を例に挙げて説明する。
【0018】
図1に示すように、このレーザ距離測定装置は、投光したレーザ光LTの反射光LRを受光して踏切内の歩行者や車両(測定エリア内の障害物)までの距離を測定するレーザ距離測定装置であって、レーザ光LTを投光する投光部1と、反射光LRを受光して受光信号Srを発信する受光部2と、受光信号Srから物体の測定距離を含む計測データ(三次元データ)Dを作成して発信する信号処理部3と、投光部1、受光部2及び信号処理部3を収容するレーザレーダヘッド7と、このレーザレーダヘッド7と離隔して配置されるとともに計測データDを受信して測定結果を出力する制御部6と、を有している。投光部1、受光部2及び信号処理部3を収容するレーザレーダヘッド7は、図2に示すように、地面Eに立設した支柱8の上端部に配置される。
【0019】
前記投光部1は、測定エリア内にレーザ光Lを発光して投光する機器である。かかる投光部1は、例えば、光源となるレーザダイオード1aと、レーザ光Lをコリメートする投光レンズ1bと、レーザダイオード1aを操作するLDドライバ1cとから構成される。LDドライバ1cは、信号処理部3からのトリガー信号Stに基づいてレーザ光Lを発光するようにレーザダイオード1aを操作し、レーザ光Lの投光と同時にパルス状の投光同期信号Ssを信号処理部3に発信する。なお、投光同期信号Ssは、トリガー信号Stにより代用するようにしてもよい。
【0020】
図1において、投光レンズ1bを透過したレーザ光LTは、回転駆動されるポリゴンミラー11と回動駆動される平面ミラー12とにより構成される走査部の光学系により、略水平方向及び略鉛直方向に走査されるようになっている。ポリゴンミラー11は、例えば、6面体の4側面が鏡面化されており、対峙する2面(上下面)の中心を回転軸としてモータ11aにより回転されるように構成されている。モータ11aは、モータドライバ11bにより操作される。平面ミラー12は、例えば、モータ12aにより回動される回動軸の側面に接続されている。モータ12aは、モータドライバ12bにより操作される。また、モータドライバ11b,12bは、信号処理部3からの制御信号Smにより制御されるとともに、スキャン角度やスイング角度等の投光条件信号Scを信号処理部3に発信する。なお、かかる光学系は単なる一例であり、図示した構成に限定されるものではない。
【0021】
前記受光部2は、測定エリア内に投光されたレーザ光LTの反射光LRを受光する機器である。ここでは、投光部1と受光部2と個別に設けて投光軸と受光軸とがずれるように構成しているが、投光軸と受光軸とが一致するように投光部1と受光部2が一体に形成されていてもよい。かかる受光部2は、例えば、反射光LRを集光する受光レンズ2aと、集光された反射光LRを受光して電圧に変換するフォトダイオード等の光電変換素子や増幅器等を有する受光部本体2bとから構成される。レーザレーダヘッド7の前面の投光窓Wを透過した反射光LRは、平面ミラー12及びポリゴンミラー11を介して受光レンズ2aに導かれる。そして、反射光LRを受光した受光部本体2bは、電圧値に変換された受光信号Srを信号処理部3に発信する。
【0022】
前記信号処理部3は、測定距離、受光強度、投光条件等のデータを含む計測データDを発信する機器である。信号処理部3は、主信号処理部31と時間計測部32とを有する。
主信号処理部31は、トリガー信号Stの発信、モータドライバ11b,12bの制御信号Smの発信、スキャン角度やスイング角度等の投光条件信号Scの受信、時間計測部32からの信号(受光強度信号Sq及び飛行時間信号Sd)の受信、計測データDの発信等の処理を行う。
【0023】
一方、時間計測部32は、投光同期信号Ssの受信により時間の計測を開始し、受光信号Srを受信した時間を把握する。したがって、時間計測部32では、投光されたレーザ光LTが、物体に反射して受光されるまでの飛行時間を計測することができる。
また、時間計測部32は、受光信号Srから所望の受光強度を有する受光信号Srを選択する弁別機能や、受光信号Srのうち飛行時間の短いものを除外するゲート機能を有していてもよい。かかる弁別機能やゲート機能により、ノイズを効率よく排除することができる。
【0024】
そして、時間計測部32は、弁別機能やゲート機能を通過した受光信号Srの受光強度信号Sq及び飛行時間信号Sdを主信号処理部31に発信する。主信号処理部31は、飛行時間信号Sdを(光の速度)×(飛行時間)/2の計算式により距離データに変換し、受光強度信号Sq、スキャン角度やスイング角度等の投光条件信号Sc等と共に計測データDを作成し、制御部6に計測データDを発信する。
【0025】
前記制御部6は、画像処理や、故障診断や、誤差補正を行うコンピュータであり、計測データDを受信して測定結果をディスプレイ、プリンタ、警報機等の出力機器9に出力する。
また、この制御部6は、ポリゴンミラー11のスキャン角度やスキャン速度、平面ミラー12のスイング角度やスイング速度、レーザ光Lのトリガー信号Stの発信タイミング等の条件設定を行い、これらの制御条件Shを信号処理部3に発信している。この制御部6は、通常レーザレーダヘッド7から離れた部位に配置される。
【0026】
さらに、制御部6は、踏切内に形成されている溝や段差、低地などの部分毎に高さの閾値を設定する処理と、計測データDに対する複数の高さの閾値による選別処理と、これらの高さの閾値によって選別された高さデータに基づいて障害物を歩行者や車両M1,M2として認識する処理を行うものとなっている(図2(d),(e))。
こうような構成を有するレーザ距離測定装置では、まず、図3に示すように、投光部1から投光したレーザ光LTを踏切内の測定エリアに走査して、計測データDを取得する。
【0027】
この際、踏切内の路面Eには、制御部6により所定高さ(例えば、路面E上30cm程度の高さ)の閾値Aが設定されており、レーザ光LTを1走査する毎に計測データDに対する高さの閾値Aによる選別処理を行って、所定高さ以上の計測データDを抽出することにより、図4(a)に示すように、踏切内における障害物である歩行者T2〜T6を検出する。
【0028】
なお、図2(d)のX方向のような左右方向にレーザ光LTを1回振ることを1スキャンと称し、このスキャンを繰り返しながら図2(d)のY方向のような前後方向にレーザ光LTを振って測定エリアを一通り走査することを1フレームと称した場合、上述した閾値A以上の計測データDを抽出する処理は、1スキャン毎に行ってもよいし、1フレーム毎に行ってもよい。
【0029】
ここで、踏切内の路面Eに対応する閾値Aによって抽出された検出結果Daには、踏切内の溝E1に入り込んだ二人の歩行者T1,T2のうちの背丈が高い歩行者T2のデータは含まれているが、背丈の低い歩行者T1のデータ(図4(a)に破線で示す部分)は含まれていない。
この溝E1には、制御部6により溝E1の底面に対応する閾値Bが設定されており、溝E1にレーザ光LTを1走査する毎に計測データDに対する高さの閾値Bによる選別処理を行い、溝E1内における所定高さ以上の計測データDを抽出することにより、図4(b)に示すように、溝E1内における障害物である歩行者T1を検出する。この際も、閾値B以上の計測データDを抽出する処理は、1スキャン毎に行ってもよいし、1フレーム毎に行ってもよい。
【0030】
そして、この溝E1に入り込んだ背丈の低い歩行者T1のデータが反映された検出結果Dbと、溝E1に入り込んだ背丈の高い歩行者T2及び路面E上の歩行者T3〜T6のデータが反映された検出結果Daとを組み合わせれば、図4(c)に示すように、歩行者T1〜T6全員のデータが反映された検出結果Dcが得られるので、踏切内の溝E1に歩行者T1,T2が入り込んでいたとしても、これらの歩行者T1,T2を障害物として認識し得ることとなる。
【0031】
なお、ここでは、凹部である溝E1が1つの場合について説明したが、これに限定されるものではなく、測定エリア内に存在する複数の凹部から計測対象としたい1つ以上の凹部を任意に選択するようにしてもよい。また、複数の凹部を選択した場合には、それぞれに少なくとも1つの閾値が含まれるように閾値を設定することが望ましい。
[実施例2]
図5及び図6は、本発明に係る障害物検出方法の他の実施例を示しており、この実施例でも、本発明を踏切内における歩行者や車両などの障害物の検出に用いた場合を例に挙げて説明する。
【0032】
この実施例における障害物検出方法では、まず、上記したレーザ距離測定装置の運用前に、例えば、踏切に設置する際の初期設定時に、このレーザ距離測定装置を作動させて踏切内の路面Eの計測を行い、これで取得した段差を含む地面形状データを制御部6に記憶させる。
次いで、図5に示すように、投光部2から投光したレーザ光LTを踏切内に走査して、計測データDを取得する。
【0033】
この際、図6(a)に示すように、上記したようにしてあらかじめ取得した段差F1〜F6を含む踏切内の地面形状データFに基づいて、路面Eを段差F1〜F6(多数の小エリア)に細分化し、これらの細分化した段差F1〜F6毎にそれぞれ同じ高さの閾値Cを設定している。
したがって、レーザ光LTを1走査する毎に計測データDに対する高さの閾値Cによる選別処理を行えば、図6(b)に示すように、歩行者T1〜T6全員の検出結果Ddが得られるので、踏切内に多数の段差F1〜F6があったとしても、路面E上や段差F1〜F6上の歩行者T1〜T6を障害物として検出し得ることとなる。なお、閾値C以上の計測データDを抽出する処理は、1スキャン毎に行ってもよいし、1フレーム毎に行ってもよい。
【0034】
この障害物検出方法では、高さの閾値Cが踏切内の地面形状、すなわち、段差F1〜F6にほぼ沿うことになるので、踏切内で倒れた人や、這って侵入した人や、置石などの高さ寸法の大きくない障害物をも検出し得ることとなる。
加えて、列車接近信号が発せられていない列車が来ないときなどに、踏切内の地面形状データFを随時計測して更新するように成せば、立ち木の生長による枝の入り込みや、積雪による路面のかさ上げなどの環境変化に迅速に対応し得ることとなる。
【0035】
なお、上記した実施例では、本発明を踏切監視に適用した場合を例に挙げて説明したが、これに限定されるものではなく、他の適用例として、例えば、本発明を横断歩道の監視や敷地の監視に適用してもよい。
【符号の説明】
【0036】
1 投光部
2 受光部
3 信号処理部
6 制御部
11 ポリゴンミラー(走査部)
12 平面ミラー(走査部)
31 主信号処理部
32 時間計測部
A,B,C 高さ閾値
Da〜Dd 検出結果
E 路面(地面)
E1 溝(凹部)
F 地面形状データ
F1〜F6 段差
LR 反射レーザ光
LT 投光レーザ光
T1〜T6 歩行者(障害物)
【特許請求の範囲】
【請求項1】
測定エリアに向けて投光したレーザ光を走査し、このレーザ光の投光タイミング及び測定エリア内に存在する障害物で反射して戻った反射レーザ光の受光タイミングにより飛行時間を計測して、前記障害物を検出する障害物検出方法であって、
レーザ光の走査毎に取得される前記障害物の三次元データに対して複数の高さの閾値で選別する処理を行い、この処理で抽出した複数の高さデータに基づいて前記障害物を認識する
ことを特徴とする障害物検出方法。
【請求項2】
複数の高さの閾値は、測定エリア内に存在する凹部から任意に選択された凹部に少なくとも1つの閾値が含まれるように設定される又は測定エリア内に存在する凹凸に合わせて設定される請求項1に記載の障害物検出方法。
【請求項3】
あらかじめ取得した前記測定エリア内の地面形状データに基づいて該測定エリアの地面を多数の小エリアに細分化し、複数の高さの閾値は、前記細分化した小エリア毎に同じ高さでそれぞれ設定される請求項1に記載の障害物検出方法。
【請求項4】
レーザ光を発する投光部と、
この投光部から発したレーザ光を測定エリアで走査する走査部と、
前記測定エリア内に存在する障害物で反射して戻った反射レーザ光を前記走査部を介して受ける受光部と、
前記投光部にレーザ光の投光指令を発すると共に前記走査部による走査を制御する制御部と、
この制御部から与えられるレーザ光の投光タイミング及び前記受光部から与えられる反射レーザ光の受光タイミングにより飛行時間を計測して、前記障害物の三次元データを取得する信号処理部を備え、
前記制御部では、レーザ光の走査毎に取得される前記障害物の三次元データを複数の高さの閾値で選別する処理と、この処理で抽出した複数の高さデータに基づいて障害物を認識する処理を行う
ことを特徴とするレーザ距離測定装置。
【請求項5】
前記制御部において、複数の高さの閾値は、測定エリア内に存在する凹部から任意に選択された凹部に少なくとも1つの閾値が含まれるように設定される又は測定エリア内に存在する凹凸に合わせて設定される請求項4に記載のレーザ距離測定装置。
【請求項6】
前記制御部において、あらかじめ取得した前記測定エリア内の地面形状データに基づいて該測定エリアの地面が多数の小エリアに細分化され、複数の高さの閾値は、前記細分化した小エリア毎に同じ高さでそれぞれ設定される請求項4に記載のレーザ距離測定装置。
【請求項1】
測定エリアに向けて投光したレーザ光を走査し、このレーザ光の投光タイミング及び測定エリア内に存在する障害物で反射して戻った反射レーザ光の受光タイミングにより飛行時間を計測して、前記障害物を検出する障害物検出方法であって、
レーザ光の走査毎に取得される前記障害物の三次元データに対して複数の高さの閾値で選別する処理を行い、この処理で抽出した複数の高さデータに基づいて前記障害物を認識する
ことを特徴とする障害物検出方法。
【請求項2】
複数の高さの閾値は、測定エリア内に存在する凹部から任意に選択された凹部に少なくとも1つの閾値が含まれるように設定される又は測定エリア内に存在する凹凸に合わせて設定される請求項1に記載の障害物検出方法。
【請求項3】
あらかじめ取得した前記測定エリア内の地面形状データに基づいて該測定エリアの地面を多数の小エリアに細分化し、複数の高さの閾値は、前記細分化した小エリア毎に同じ高さでそれぞれ設定される請求項1に記載の障害物検出方法。
【請求項4】
レーザ光を発する投光部と、
この投光部から発したレーザ光を測定エリアで走査する走査部と、
前記測定エリア内に存在する障害物で反射して戻った反射レーザ光を前記走査部を介して受ける受光部と、
前記投光部にレーザ光の投光指令を発すると共に前記走査部による走査を制御する制御部と、
この制御部から与えられるレーザ光の投光タイミング及び前記受光部から与えられる反射レーザ光の受光タイミングにより飛行時間を計測して、前記障害物の三次元データを取得する信号処理部を備え、
前記制御部では、レーザ光の走査毎に取得される前記障害物の三次元データを複数の高さの閾値で選別する処理と、この処理で抽出した複数の高さデータに基づいて障害物を認識する処理を行う
ことを特徴とするレーザ距離測定装置。
【請求項5】
前記制御部において、複数の高さの閾値は、測定エリア内に存在する凹部から任意に選択された凹部に少なくとも1つの閾値が含まれるように設定される又は測定エリア内に存在する凹凸に合わせて設定される請求項4に記載のレーザ距離測定装置。
【請求項6】
前記制御部において、あらかじめ取得した前記測定エリア内の地面形状データに基づいて該測定エリアの地面が多数の小エリアに細分化され、複数の高さの閾値は、前記細分化した小エリア毎に同じ高さでそれぞれ設定される請求項4に記載のレーザ距離測定装置。
【図1】



【図2】

【図3】

【図4】

【図5】

【図6】

【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2010−249569(P2010−249569A)
【公開日】平成22年11月4日(2010.11.4)
【国際特許分類】
【出願番号】特願2009−96984(P2009−96984)
【出願日】平成21年4月13日(2009.4.13)
【出願人】(000000099)株式会社IHI (5,014)
【Fターム(参考)】
【公開日】平成22年11月4日(2010.11.4)
【国際特許分類】
【出願日】平成21年4月13日(2009.4.13)
【出願人】(000000099)株式会社IHI (5,014)
【Fターム(参考)】
[ Back to top ]