
Fターム[5J084EA01]の内容
光レーダ方式及びその細部 (24,468) | 目的 (2,756) | ノイズ対策、S/N比改善 (427)
Fターム[5J084EA01]の下位に属するFターム
背景ノイズ対策 (130)
スペックルノイズ対策 (1)
Fターム[5J084EA01]に分類される特許
1 - 20 / 296
レーザレーダシステム、レーザ測距装置および制御装置
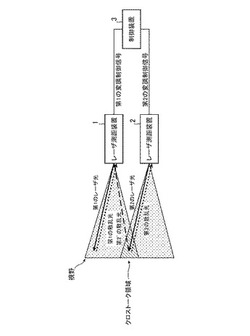
【課題】広視野な受信系においてクロストークによる誤りを回避する。
【解決手段】レーザ測距装置1,2は、制御装置3による制御に従って、所定の変調信号でレーザ光を変調し、対象物に向けて走査するレーザ光送信手段(レーザ装置11、変調器12およびスキャナ13)と、対象物からの散乱光を受光し、電気信号に変換する散乱光受信手段(受信レンズ15および受光器16)と、電気信号と変調信号との時間差または位相差に基づいて対象物までの距離を算出する距離算出装置17とを備え、制御装置3は、各レーザ測距装置1,2によるレーザ光の重なりを回避するように、または、当該重なる領域を指定するように、当該各レーザ光の所定諸言を同期させる。
(もっと読む)
無人走行体を用いた環境情報の取得システム

【課題】粉塵、煙又は水蒸気が立ち込める劣悪な環境下においても構築物内の環境を正確に取得可能な環境情報の取得システムを提供する。
【解決手段】遠隔操縦装置を用いてオペレータにより遠隔操縦される無人走行体5に、走査式二次元測距装置105と、放射線検出器116を搭載する。また、安全な場所には、遠隔操縦装置を備えた制御装置本体を設置する。制御装置本体は、遠隔操縦装置の操作内容に応じた制御信号を出力して無人走行体5の走行制御を行いながら、走査式二次元測距装置105の検出データから生成される三次元画像と、放射線検出器116の検出データを合成し、制御装置本体に接続された表示装置に表示する。
(もっと読む)
光3次元カメラ
【課題】近距離から遠距離まで高い測距精度を確保する。
【解決手段】ターゲット20への送信光を出力する光源3と、送信光を所定照射強度パターンとする拡散板4と、所定照射強度パターンとされた送信光に対するターゲット20からの散乱光を複数の素子で受光し、電気信号に変換する受光素子アレイ7と、電気信号から位相を検波する位相検波器アレイ8と、電気信号から強度を検出する強度検出部101と、強度に基づいて、三角測量方式により、素子ごとにターゲット20の対応点までの距離を計測する距離検出部102と、位相に基づいて、TOF方式により、素子ごとにターゲット20の対応点までの距離を計測する距離検出部103と、強度に基づいて、素子ごとに距離検出部102,103による計測結果のいずれか一方を選択する判定部104と、選択された計測結果に基づいて、ターゲット20の3次元形状を計測する3次元画像出力部105とを備えた。
(もっと読む)
レーザースキャンセンサ
【課題】警戒エリア設定後に自動車などが進入して駐車されたり新たに無害な障害物が設置されたりした場合であっても、本来検知すべき侵入者を的確に検知可能なレーザースキャンセンサを提供する。
【解決手段】レーザー距離計110と、スキャン機構120と、距離データ取得部130と、設置状態情報と測定方向毎の検知エリア情報とを記憶するメモリ160と、取得された距離データから、前記検知エリア情報との比較によって判明する侵入または移動した物体のうちで人体に対応する可能性がある部分を抽出するとともに、そうして抽出された各抽出部分の時系列での移動状況に基づき、所定時間内の移動距離が所定距離内である前記抽出部分を除外した上で、残りの前記各抽出部分が人体であるか否かをそれぞれ判定する人体判定部140と、前記検知エリア情報を所定条件下で更新する検知エリア情報更新部140と、警告出力制御部150とを備える。
(もっと読む)
撮像装置、撮像方法、及びプログラム
【課題】被写体までの距離とともに、被写体の肌領域を精度良く算出する。
【解決手段】第1のLEDは、被写体に対して、第1の波長の光を照射し、第2のLEDは、被写体に対して、第1の波長とは異なる第2の波長の光を照射し、距離画像センサは、被写体からの反射光を受光する。そして、肌検出部は、被写体からの反射光として第1の波長の光が受光されることにより得られる第1の画像と、被写体からの反射光として第2の波長の光が受光されることにより得られる第2の画像に基づいて、被写体の肌を表す肌領域を検出し、距離画像センサは、第1の波長の光が被写体に照射されたときから、被写体からの反射光として受光されるまでの第1の往復時間を算出し、算出した第1の往復時間に基づいて、被写体までの距離を算出する。本開示は、例えば、被写体の撮像により、距離画像を生成する撮像装置等に適用できる。
(もっと読む)
距離測定装置、および距離測定プログラム
【課題】物体までの距離を測定する距離測定装置において、物体までの距離を精度よく検出できるようにする。
【解決手段】レーダ装置は、区分された領域毎に、演算距離および演算輝度を検出し、演算輝度と、反射光の検出が困難になる程度の輝度に設定された輝度閾値とを比較し、演算輝度が輝度閾値以上となる高輝度領域を抽出する。そして、照射領域において水平方向に並ぶ一対の高輝度領域を検出し、一対の高輝度領域の間隔に基づいて一対の高輝度領域を形成する物体を表す高輝度物体までの距離を演算する(S510〜S550)。この構成では、輝度が高く、レーザ光の反射光が検出できない可能性がある高輝度領域においても、物体までの距離を検出することができる。
(もっと読む)
プラットホームドア用安全装置
【課題】 プラットホームドアの近傍の所定の領域内に存在する物体を従来より正確に検出することができるプラットホームドア用安全装置を提供する。
【解決手段】 プラットホームドア用安全装置は、自身に対する物体の距離を受光素子の出力のピークのタイミングに基づいて取得して距離の情報をそれぞれ有する画素の集合である距離画像を生成するタイムオブフライト方式の三次元センサーと、プラットホームドアの近傍の検出領域内に存在する物体を検出する領域内物体検出手段と、領域内物体検出手段によって物体の検出に使用される画素である検出用画素を選定する検出用画素選定手段とを備えており、検出用画素選定手段は、三次元センサーによって生成された距離画像の画素のうち、その距離画像より前に三次元センサーによって生成された距離画像からの距離の変化量が所定の基準を満たす(S103でYES)画素のみを検出用画素として選定する(S104)。
(もっと読む)
光学式遠隔気流計測装置の有色ノイズ低減方法とその装置
【課題】本発明の目的は、装置の外部環境に応じた有色ノイズであっても低減することができ、計測信頼性の劣化が少なくより遠距離まで計測可能で、広い飛行速度範囲に対応できる光学式遠隔気流計測装置を提供することにある。
【解決手段】本発明の光学式遠隔気流計測装置の有色ノイズ低減方法は、レーザ光を送信信号として大気中に放射して、受信信号との間の周波数のドップラーシフト量に基づき遠隔領域の気流の風速を計測する光学式遠隔気流計測装置において、最遠方以遠の領域では散乱光の信号強度がほとんどないとみなし、その最遠方以遠の計測領域においてある周波数間隔で分割されたドップラー周波数成分毎に信号強度の平均化処理を行ってノイズ分布を算出し、該ノイズ分布をある距離間隔で分割された計測領域の信号強度分布のすべてに対して該ドップラー周波数成分毎に減算処理を行うものとした。
(もっと読む)
距離画像生成装置および距離画像生成方法
【課題】光飛行型距離画像生成装置によって撮影空間の距離画像生成する際、同一撮影空間内に同時期に複数の光飛行型距離画像生成装置が存在する場合であっても、精度良く測距を行う。
【解決手段】光源から照射する変調光の発光(ON)期間と、電荷蓄積部の各単位蓄積部における電荷の蓄積期間とを一定としながら、変調周期毎に周期の長さを変化させるよう、発光と蓄積とを制御する。周期の長さは、予め定めた固定の変調周期Tsに、周期毎に異なる付加時間を付加することにより変化させる。そして、付加時間中に取得した電荷は廃棄する。
(もっと読む)
自己位置推定装置、方法、及びプログラム
【課題】自己位置の推定精度を向上させる。
【解決手段】自己位置推定装置1は、移動体の複数の視点から取得される環境データに基づいて視点毎に二次元マップを作成するマップ作成部2と、複数の二次元マップの中から直線部が比較的多い二次元マップを抽出するマップ抽出部3と、抽出された二次元マップと、当該抽出された二次元マップと同一の視点から取得される環境データとの照合結果に基づいて、移動体の自己位置を推定する位置推定部4とを備える。
(もっと読む)
レーダ装置
【課題】発光部で発生する電磁ノイズが受光部に与える影響を抑制した小型化可能なレーダ装置を提供する。
【解決手段】発光部10を、発光部シールド17及び偏光分離素子14が形成する電磁遮蔽空間内に配置する。これにより、発光部10がレーザ光を照射する時に発生させる電磁ノイズが、発光部シールド17の開口部から外部に漏洩することを抑制することができる。つまり、発光部10にて発生し、受光部12に干渉する電磁ノイズの影響を低減することができるため、発光部10と受光部12とを接近配置させて装置を小型化しても、電磁ノイズの影響の少ない受光信号を得ること、ひいては正常な測距を行うことができる。
(もっと読む)
空間情報検出装置
【課題】複数個の発光素子を用いて強度変調光を投光し、かつ投光と受光とのタイミング調整の期間を備える構成で、タイミング調整の期間における消費電力を抑制する。
【解決手段】発光素子11は群121,122,123に分けられ、群121,122,123ごとに設けた通電制御素子13により光出力が制御される。動作モード選択部103は、基準信号Sg0に対する検出信号Sg2の時間差を計測する校正モードと、発光素子11から強度変調光を投光してから受光素子21が受光するまでの時間を計測する測定モードとを選択する。測定モードでは、検出信号Sg2の基準信号Sg0に対する時間差が規定値に維持されるように電圧制御遅延回路1013による遅延時間が設定される。経路選択部15は、校正モードが選択されているときに、発光素子11のうちの1つの群121に対応する通電制御素子13にのみ通電する。
(もっと読む)
計測システムおよび計測方法
【課題】距離計測センサを用いて、観測領域内の移動対象を追跡しつつ、精度よく、対象を識別して分類することが可能な計測装置を提供する。
【解決手段】計測装置100は、対象までの水平方向の距離を計測可能に配置された複数のレーザレンジファインダ10.1〜10.4と、計測結果から、対象の位置および移動速度を推定する追跡モジュール5610と、計測結果に基づいて、対象の形状を表現する特徴ベクトルを算出する特徴抽出演算部5622と、特徴ベクトルに基づいて、対象が予め定められた分類の各クラスに属する確率を事前確率として算出する事前確率計算部5624と、対象が他の対象と同期して移動している同期状態であるかを判別し、算出された事前確率と、同期状態にある対象が各クラスに対応する尤度とに基づいて、対象が属するクラスを判別するラベル割当処理部5628とを含む。
(もっと読む)
近赤外線及び遠赤外線を用いる物体検知装置
【課題】 物体を適切に検知することができる物体検出装置の提供
【解決手段】 自動ドアセンサ100は、近赤外線センサ部100A、遠赤外線センサ部100B及び制御部100Cを有している。近赤外線センサ部100Aは、近赤外線を用いて近赤外線検知領域R110に物体が存在するか否かを検知する。近赤外線センサ部100Aは、複数の近赤外線投光領域を形成することによって、物体の存在、物体の検知位置、物体の移動方向を検知する。遠赤外線センサ部100Bは、遠赤外線検知領域R130からの遠赤外線を受光することによって、遠赤外線検知領域R130に人が存在するか否かを検知する。制御部100Cは、近赤外線センサ部100A及び遠赤外線センサ部100Bの検知結果に基づいて、自動ドアシステム50のドアパネル55a、55bを開閉するための所定の信号を発生する。
(もっと読む)
距離測定装置及び軌道周辺支障物検出装置
【課題】太陽光などの投光波長以外の光を極限まで制限して、投光波長のみを受光できるようにする。
【解決手段】干渉膜を使った平面板の干渉フィルタを用いて広い視野の検出手段を構成すると、平面板の干渉フィルタへの入射角に応じて透過帯域の移動が起こり、所望の信号強度を得ることが困難となる。この発明は、干渉フィルタの形状を球面状にして全視野の受光光線を干渉フィルタの入射面に対して垂直に入射するようにして、透過帯の移動をなくし、所望の信号強度を得るようにした。また、受光レンズの第一主点と球面状干渉フィルタの球面中心とを一致させて配置することにより、干渉フィルタへ入射する反射光の入射角を0°にして透過帯域が変化しないようにした。
(もっと読む)
距離測定装置
【課題】移動体と対象物との間の相対的な位置関係が変動した場合でも、高精度な距離の測定が可能となる距離測定装置を提供する。
【解決手段】投光部11より、上端部を有し、且つ、水平方向に広がる発光領域を有する第1投光パルスを照射する。そして、測定対象物31にて反射する領域光をカメラ12にて撮像し、この画像を同期検波して第1投光パルスの上端部に対応する上端エッジを検出する。また、第1投光パルスがオフとされているときに撮像される測定対象物の画像から該測定対象物31の形状エッジを検出し、形状エッジと上端エッジが一致する場合については、この上端エッジを除去し、両者が一致する場合の上端エッジを用いて三角測量の原理を用いて、測定対象物31までの距離を測定する。
(もっと読む)
距離計測装置及び距離計測方法
【課題】計測密度の低下を防止して高密度な距離計測を実現することのできる距離計測装置を提供する。
【解決手段】本発明の距離計測装置1は、複数のドットを配置した投光パターンを照射する投光部2と、投光パターンが計測対象物で反射された光を撮像する撮像部3と、所定の距離範囲内に計測対象物が存在した場合に投光パターンのドットの撮像位置がエピポーラ線方向に移動する移動軌跡を示した距離別計測パターンと撮像部3による撮像画像とを比較することにより、計測対象物が存在する距離範囲を特定する距離範囲特定部6と、距離別計測パターンの移動軌跡上における撮像画像のドット位置に基づいて計測対象物の位置を特定する位置特定部7と、位置特定部7で特定された計測対象物の位置に基づいて計測対象物までの距離を算出する距離算出部8とを備えることを特徴とする。
(もっと読む)
レーザレーダ装置
【課題】遠距離の監視範囲や遠近差の大きな監視範囲であっても、精度よく監視範囲内における物体を検出可能なレーザレーダ装置を提供する。
【解決手段】レーザ光Liを投光する投光部11と、レーザ光Liを垂直方向Vに走査させる垂直スキャナ12と、レーザ光Liを水平方向Hに走査させる水平スキャナ13と、レーザ光Liの反射光Lrを受光して受光情報d4を発信する受光部14と、受光情報d4から物体Mの距離Lpを算出する距離演算部15と、投光部11、垂直スキャナ12及び水平スキャナ13の制御を行う制御部16と、監視範囲Sにおける遠近距離に応じてレーザ光Liの透過率δを調整する強度調整フィルタ17と、を有し、強度調整フィルタ17は、遠距離に照射するレーザ光Liの透過率δを高くし、近距離に照射するレーザ光Liの透過率δを低くするように構成されている。
(もっと読む)
レーザレーダ装置
【課題】レーザレーダ装置以外の他の距離測定装置を備えずに、高い距離測定精度と広い測定可能距離間隔を有するレーザレーダ装置を提供する。
【解決手段】 レーザ光を目標に向けて発振し、目標からの反射光を受信して受信信号に変換する光送受信部10と、あらかじめ設定された測定可能時間間隔に基づき、光送受信部10によるレーザ光の発振から反射光の受信までの時間を測定することでレーザ光の照射点までの距離を示す距離信号を算出すると共に、レーザ光の照射点からのレーザ光の反射光強度を示す強度信号を算出する距離強度算出部20と、距離強度算出部20により算出された距離信号及び強度信号に基づきあらかじめ設定された測定可能時間間隔より狭い測定可能時間間隔を設定する信号処理部30とを備え、距離強度算出部20は信号処理部30により設定された狭い測定可能時間間隔に基づいて距離信号を算出する。
(もっと読む)
走査式測距装置の信号処理装置、信号処理方法、及び走査式測距装置
【課題】ノイズ源となる物体の背後に存在する監視対象物を適正に検出することができる走査式測距装置の信号処理装置を提供する。
【解決手段】
所定の走査角度毎に出力される測定光に基づいて走査式測距装置から物体までの距離を算出する距離算出部230と、距離算出部230により算出された距離データが、隣接する複数の走査角度方向に存在するときに、当該複数の距離データを纏めたグループを生成し、当該グループに含まれる距離データの最大値をそのグループの代表距離に設定するグループ生成処理部23iと、生成されたグループに含まれる距離データの個数で定義される物体検出幅が、代表距離に応じて予め設定された物体検出最小幅を示す個数以上となる場合に、監視対象物が存在すると判定する監視対象物判定部23jと、監視対象物検知信号を出力する信号出力部24とを備えている。
(もっと読む)
1 - 20 / 296
[ Back to top ]