
Fターム[5J084EA20]の内容
光レーダ方式及びその細部 (24,468) | 目的 (2,756) | 装置の監視、誤作動対策、障害対策 (241)
Fターム[5J084EA20]に分類される特許
1 - 20 / 241
測定補助器具、レーザトラッカー、およびこれらを用いた直径測定方法
無人走行体を用いた環境情報の取得システム
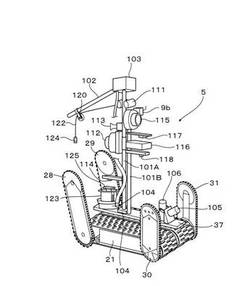
【課題】粉塵、煙又は水蒸気が立ち込める劣悪な環境下においても構築物内の環境を正確に取得可能な環境情報の取得システムを提供する。
【解決手段】遠隔操縦装置を用いてオペレータにより遠隔操縦される無人走行体5に、走査式二次元測距装置105と、放射線検出器116を搭載する。また、安全な場所には、遠隔操縦装置を備えた制御装置本体を設置する。制御装置本体は、遠隔操縦装置の操作内容に応じた制御信号を出力して無人走行体5の走行制御を行いながら、走査式二次元測距装置105の検出データから生成される三次元画像と、放射線検出器116の検出データを合成し、制御装置本体に接続された表示装置に表示する。
(もっと読む)
レーザースキャンセンサ

【課題】警戒エリア設定後に自動車などが進入して駐車されたり新たに無害な障害物が設置されたりした場合であっても、本来検知すべき侵入者を的確に検知可能なレーザースキャンセンサを提供する。
【解決手段】レーザー距離計110と、スキャン機構120と、距離データ取得部130と、設置状態情報と測定方向毎の検知エリア情報とを記憶するメモリ160と、取得された距離データから、前記検知エリア情報との比較によって判明する侵入または移動した物体のうちで人体に対応する可能性がある部分を抽出するとともに、そうして抽出された各抽出部分の時系列での移動状況に基づき、所定時間内の移動距離が所定距離内である前記抽出部分を除外した上で、残りの前記各抽出部分が人体であるか否かをそれぞれ判定する人体判定部140と、前記検知エリア情報を所定条件下で更新する検知エリア情報更新部140と、警告出力制御部150とを備える。
(もっと読む)
距離画像生成装置および距離画像生成方法
【課題】光飛行型距離画像生成装置によって撮影空間の距離画像生成する際、同一撮影空間内に同時期に複数の光飛行型距離画像生成装置が存在する場合であっても、精度良く測距を行う。
【解決手段】光源から照射する変調光の発光(ON)期間と、電荷蓄積部の各単位蓄積部における電荷の蓄積期間とを一定としながら、変調周期毎に周期の長さを変化させるよう、発光と蓄積とを制御する。周期の長さは、予め定めた固定の変調周期Tsに、周期毎に異なる付加時間を付加することにより変化させる。そして、付加時間中に取得した電荷は廃棄する。
(もっと読む)
自己位置推定装置、方法、及びプログラム
【課題】自己位置の推定精度を向上させる。
【解決手段】自己位置推定装置1は、移動体の複数の視点から取得される環境データに基づいて視点毎に二次元マップを作成するマップ作成部2と、複数の二次元マップの中から直線部が比較的多い二次元マップを抽出するマップ抽出部3と、抽出された二次元マップと、当該抽出された二次元マップと同一の視点から取得される環境データとの照合結果に基づいて、移動体の自己位置を推定する位置推定部4とを備える。
(もっと読む)
センサ装置
【課題】対象物の検出範囲がより広いセンサ装置を提供する。
【解決手段】センサ装置1は、センサ装置1の外方向に光を照射する発光素子2及び入光レンズ3と、対象物により反射された光を集光する集光レンズとしての受光レンズ4と、受光レンズ4により集光された光を受光する受光部としてのPSD5aと、を有する。PSD5aの受光面は、凹形状に湾曲している。センサ装置1は、対象物からの反射光を、凹形状に湾曲したPSD5aの受光面により受光するため、対象物の測定範囲をより広くすることができる。
(もっと読む)
光学装置
【課題】光路上に配置した複数のミラーのうち角度ズレを生じたミラーを容易に特定できる光学装置を提供することを課題とする。
【解決手段】実施形態に係る光学装置は、光路上に配置した複数のミラーと、各ミラーを保持した複数のミラーホルダーと、各ミラーホルダーに設けられた反射面と、を有する。各反射面は、光路と直交する面に沿って各ミラーホルダーに取り付けられている。
(もっと読む)
自動水栓
【課題】 使用者の用途に応じた吐水形態の切り替えを可能とする自動水栓を提供する。
【解決手段】 給水経路から給水された水を吐出する吐水口と、前記給水経路に接続された電磁弁と、前記電磁弁を駆動することで吐水と止水とを切り替える制御部と、前記吐水口近傍の異なる位置に設けられた少なくとも2つの検知センサと、を備え、前記検知センサの検知領域が検知センサ近傍において重なっていない自動水栓において、前記制御部は、いずれかの検知センサの検知レベルが所定の吐水検知レベル以上であると吐水を行うと共に、一方のセンサの検知レベルが吐水検知レベルより高く設定された近接検知レベル以上であると、他方のセンサの検知レベルに基づいて吐水と止水の切り替えを行う。
(もっと読む)
車両用制御装置
【課題】基準軸のずれが発生したことを精度よく検出することが可能な車両用制御装置を提供する。
【解決手段】運転者支援システムにおけるヘッド部では、車両に対する物標探査器7の姿勢変化量(傾斜量,加速度)を検知する姿勢検知器8が、物標探査器7とともに筐体30の内部に固定されており、制御部20が、姿勢検知器8にて検知した姿勢変化量が予め設定された閾値変化量(閾値傾斜量,第1の加速度)を上回る場合に、物標探査器7の基準軸のずれが発生したことを検出する。つまり、実際に物標探査器7が車両に対して所定量ずれている場合に、物標探査器7の基準軸のずれが発生しているものとみなすことにより、基準軸のずれが発生したことを精度よく検出することが可能となる。
(もっと読む)
レーザレーダ装置
【課題】遠距離の監視範囲や遠近差の大きな監視範囲であっても、精度よく監視範囲内における物体を検出可能なレーザレーダ装置を提供する。
【解決手段】レーザ光Liを投光する投光部11と、レーザ光Liを垂直方向Vに走査させる垂直スキャナ12と、レーザ光Liを水平方向Hに走査させる水平スキャナ13と、レーザ光Liの反射光Lrを受光して受光情報d4を発信する受光部14と、受光情報d4から物体Mの距離Lpを算出する距離演算部15と、投光部11、垂直スキャナ12及び水平スキャナ13の制御を行う制御部16と、監視範囲Sにおける遠近距離に応じてレーザ光Liの透過率δを調整する強度調整フィルタ17と、を有し、強度調整フィルタ17は、遠距離に照射するレーザ光Liの透過率δを高くし、近距離に照射するレーザ光Liの透過率δを低くするように構成されている。
(もっと読む)
レーザレーダシステム,及び取付方法
【課題】自動車に取り付けられるレーザレーダにおいて、モレ光の影響でゴーストが物体として検出されることの低減。
【解決手段】レーザレーダシステム1は、レーザレーダ10と、処理済部材80とを備える。レーザレーダ10は、レンズを含む光学素子を介して、規定角度範囲LA,RAに渡ってレーザ光を照射し、反射されたレーザ光を受光することで物体を検知する。処理済部材80は、レーザレーダ10が取り付けられる自動車における外表面のうち、モレ範囲LE,REと重複する外表面の範囲に反射率を低減させる反射率低減処理が施された部材である。モレ範囲LE,REとは、規定角度範囲LA,RAへのレーザ光の照射に伴って、当該規定角度範囲LA,RAに照射されるレーザ光の強度よりも強度が小さいレーザ光が照射される範囲であり、規定角度範囲LA,RAに隣接する範囲である。
(もっと読む)
走査形レーザ距離センサ装置
【課題】対象物の反射率が低い場合でも、確実にはみ出しを検知する走査形レーザ距離センサ装置を提供する。
【解決手段】パレットまでの距離をあらかじめRAM11に記憶する。車両を入庫し、入庫ボタン36を押すことにより、制御回路10は走査形レーザ装置を起動して反射物体までの距離を測定する。車両があるときの測定結果と、RAM11の記憶した距離とを比較し、異なる場合、検知信号を出力する。
(もっと読む)
画像形成装置
【課題】装置を使用する予定のない人を検知してしまう誤検知を抑制することをより簡易な構成で実現することができる技術を提供する。
【解決手段】記録材に画像を形成する画像形成部と、人が操作するユーザインタフェースと、画像形成部を収納する装置筐体におけるユーザインタフェースを操作する人が位置する側の外面を形成する支持部カバー500と、人を検知する第1の人検知部600と、を備え、第1の人検知部600は、ユーザインタフェースを操作する人が位置すると想定される領域に人が近づいてきたことを検知可能な向きに配置された焦電型センサ610を有し、支持部カバー500は、第1の人検知部600の手前側に配置されて焦電型センサ610の検知範囲の一部を覆うことで、第1の人検知部600の検知範囲A1を水平面に対して斜め下方の範囲に限定する。
(もっと読む)
レーザ測距装置
【課題】簡易な構成により、測距誤差を補正する。
【解決手段】レーザ送受信部(レーザ光走査部103と受信部104)は、既定の位置に設置され、既定の測距対象面に既定の仰角にて対向し、出射角度を変化させながら測距対象面にレーザ光を出射し、反射光を受光する。基準反射板6は、レーザ光が照射される位置に配置され、レーザ光を反射する。位相検波器9は、反射光に基づき、測距対象面においてレーザ光を反射した各反射点での位相値を検出するとともに、基準反射板6での位相値を検出する。距離補正装置11は、レーザ送受信部と測距対象面との位置関係と、レーザ送受信部の仰角と、各々のレーザ光出射時の出射角度とに基づき、各反射点での位相値を算出し、位相検波器9により検出された各反射点での位相値と基準反射板6での位相値と、算出した各反射点での位相値とを用いて、補正値を算出する。
(もっと読む)
レーダ装置
【課題】走査反射部と偏光分離素子との間の位置関係の調整を不要にすることができるレーダ装置を提供
【解決手段】レーダ装置1は、レーダ波となるパルスレーザ光を照射する光源2と、レーザ光を検出する光検出器3と、光源2から照射されたレーザ光を走査する走査部5と、入射したレーザ光を光検出器3へ導く受光光学系6とを備える。また走査部5は、偏光分離光変角素子11と、再帰性反射素子12と、1/4波長板13とから構成される。そして偏光分離光変角素子11は、レーザ光を透過可能な材料で形成された板形状の基板21と、偏光分離機能を有する構造となるように基板21の面上に形成された偏光分離構造体22とから構成される。そして偏光分離光変角素子11は、基板21に設けられた回転軸23を中心にして振動し、光源2から照射されたレーザ光のうちTM成分を透過させるとともにTE成分を所定走査角度範囲で走査する。
(もっと読む)
車両のレーザーレーダーユニット
【課題】レーザー光の透過損失の抑制と部品点数の削減を図ることのできる車両のレーザーレーダーユニットを提供する。
【解決手段】発光部10と受光部11を含むユニット本体13を、ヘッドライト5のハウジング7の内部に設置する。ハウジング7の前方を覆うカバーガラス9に、発光レンズ16と受光レンズ17を一体に形成する。
(もっと読む)
距離測定方法および距離測定装置
【課題】簡易な構成で、物標までの距離の測定精度を向上可能な距離測定方法および距離測定装置を提供する。
【解決手段】発光トリガ信号をきっかけに発光部から照射されたレーザ光の物標からの反射光を受光する受光部は、発光部からレーザ光が照射されるタイミングで、出力する電気信号に変動が生じるように構成されている。制御部では、測定部からトリガ信号が出力されてから、測定部にて検出される電気信号に最初に生じる電気信号の変動を第1変動信号、二番目に生じる変動を第2変動信号、第1変動信号が生じるまでの期間を第1期間、第2変動信号が生じるまでの期間を第2期間として、第1期間および第2期間の差を第1の距離測定時間として測定する(S110−S175)。続いて、第1の距離測定時間と予め定められた距離係数とを乗算した値を物標までの距離として算出する(S180)。
(もっと読む)
対象物識別装置及びプログラム
【課題】解像度が低下する遠方に存在する物体であっても、精度良く対象物か否かを識別する。
【解決手段】評価点群抽出部22で、レーザレーダ12により観測された観測データを取得して、観測データに基づいて、車両周辺の物体上の複数の点の各々を3次元空間に投影し、投影された点を点間距離に基づいてグループ化し、対象物の大きさに相当する大きさのグループに含まれる点群を評価点群として抽出する。特徴量算出部24で、抽出された評価点群の水平面内の分布の高さ方向の変化を示すスライス特徴量を算出し、識別情報記憶部26に記憶された識別情報と比較して、抽出された評価点群が示す物体が対象物か否かを識別する。
(もっと読む)
レーザレーダ装置
【課題】レーザ光の照射経路上のカバーで生じる内部反射光(外乱光)が受光センサに入り込むことをより確実に抑制することができ、外乱光に起因する誤検出を効果的に防止し得る構成を提供する。
【解決手段】レーザレーダ装置1では、受光面20aの前方側且つ下側寄りの位置を部分的に覆う構成で遮蔽部材70が配置されている。この遮蔽部材70には、受光面覆い部77と、上下に並ぶ複数の凸状部71とを備えており、いずれの凸状部71も、中心軸42aを通り且つ受光面20aの中心位置を通る切断面において外形が三角形状となっており、隣接する凸状部間には窪み79が形成されている。そして、窪み79の上側に配置される凸状部下方面は、レーザ光L1が凹面鏡41から前方側に照射されるときに、当該レーザ光L1の一部が透過板80で反射して生じる鏡面反射成分又はガウス拡散成分を窪み79の内壁に向けて反射するようになっている。
(もっと読む)
物体検出装置
【課題】光学窓の汚れを検出するための受光素子を設けることなく、光学窓の汚れを検出できるようにする。
【解決手段】鉛直下方向を含む面内を走査するようにレーザー光の向きを変化させて光学窓を介して照射するとともに、レーザー光が物体に反射した反射光を光学窓を介して受光するレーザーセンサ10を備え、レーザー光の照射方向を鉛直下方向に変化させて、路面に反射した反射光が検出されたか否かに基づいて光学窓の汚れを判定する(S202〜S216)。
(もっと読む)
1 - 20 / 241
[ Back to top ]