
Fターム[5J084BA20]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学系 (4,875) | 投光系に関するもの (2,428) | 投光波長に関するもの (338) | 赤外線方式 (184)
Fターム[5J084BA20]に分類される特許
121 - 140 / 184
路車間通信システム、光ビーコン、車載機、及び車両
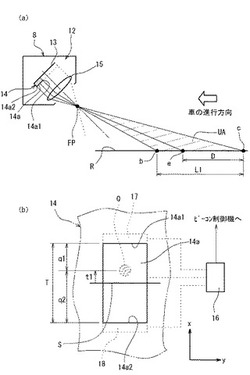
【課題】 ドライバに対する安全運転支援を精度よく行うことができる路車間通信システムを提供する。
【解決手段】 本発明の路車間通信システムは、通信領域を道路Rの所定範囲に設定する投受光器8を有する光ビーコンと、車両に搭載されるとともに、前記通信領域において投受光器8との間でアップリンク情報及びダウンリンク情報の送受信を行う車載機と、を備えている。投受光器8は、前記アップリンク情報を受光する受光面14aを有する受光部12を備えている。この受光部12は、受光面14aを道路R上に投影するようにアップリンク領域UAを設定するとともに、受光面14aにおける前記アップリンク情報を受光した受光位置に関する受光位置情報を出力する。光ビーコン4は、受光部12が出力する前記受光位置情報に基づいて、アップリンク領域UAにおいて前記車載機が前記アップリンク情報を送信した送信位置を示す車載機位置情報を生成し、この車載機位置情報を含んだ前記ダウンリンク情報を投受光器8に送信させる制御部を備えている。
(もっと読む)
赤外線ユーザーセンサを有する流体分与器

【課題】物体が目標区域に入った時に、ユーザーに自動的に分配するために光検出器と関連するコントローラを利用する分配システム。
【解決手段】コントローラ26は、光検出器22に近接して取り付けられた光源24をパルスさせるようにプログラムされている。コントローラは、光検出器の受信信号で電圧を常時モニターし、オンオフでパルスされる光から電圧の差を評価する。コントローラは差を合計し、平均差の値を生起するために指定の期間にわたって差を常時更新する。平均差の値は目標オフセット値と合計され、瞬間電圧差と比較される。瞬間差が目標オフセット値及び平均差の和を超える場合、コントローラは、物体上に流体又は他の製品を分配する分配機構に信号を送る。
(もっと読む)
距離画像装置及び撮像装置
【課題】開口率を大幅に改善し、高精度な距離画像を生成する。
【解決手段】撮像装置を構成するための半導体基板25内に画素ごとにpn接合フォトダイオード(PD)14を設ける。PD14のn型領域24の表面に、オーバーフローバリア(OFB)17を設け、OFB18の表層にオーバーフロードレイン(OFD)18を形成する。OFB17及びOFD18は、受光期間の開始時にPD14内の信号電荷(電子)を破棄するための電荷破棄部である。この電荷破棄部と同じく、PD14より半導体基板25の表層側の領域に、電荷転送チャネル23a,23bにより構成される電荷蓄積部を設ける。電荷蓄積部は、1画素につき複数設けられ、照射光の変調周期に同期した複数のタイミングでPD14から読み出した信号電荷を蓄積するものである。これにより、半導体基板25の裏面側全体が受光領域となり、開口率がほぼ100%となる。
(もっと読む)
車両周辺監視装置
【課題】車両周辺の景色を撮像した画像と、車両周辺の障害物から車両までの距離又は障害物の速度とを表示部に重畳表示できる車両周辺監視装置であって、比較的小さい設置スペースで実現できる車両周辺監視装置を提供すること。
【解決手段】車両周辺の光を受光することで、車両周辺の景色を撮像する撮像部20と、車両周辺の障害物で反射されたレーザ光を受光することで、障害物から車両までの距離及び障害物の速度のうち少なくともいずれか1つを検知する障害物検知部10と、撮像部20により撮像された車両周辺の景色の画像に、障害物検知部10により検知された障害物から車両までの距離及び障害物の速度のうち少なくともいずれか1つを示す数字を合成した合成画像を表示する表示部30と、を備えたことを特徴とする。
(もっと読む)
検出範囲の広がった自己混合干渉計用レーザーセンサ
本発明は自己混合干渉計用のレーザーセンサに関する。当該レーザーセンサは、レーザー放射線を放出する少なくとも1つの半導体レーザー光源及び該レーザー光源のレーザー放射線を観測する少なくとも1つの光検出器(6)を有する。前記レーザー光源は、第1端部ミラー(4)の前面上の層構造(15)内に設けられた利得媒体(3)を有するVECSELである。前記第1端部ミラー(4)は外部の第2端部ミラー(5)を備えた外部共振器を形成する。提案された当該レーザーセンサは、検出範囲を広げ、かつ低コスト製造プロセスでの製造が可能である。  (もっと読む)
(もっと読む)
個体検出器
【課題】検出領域の環境変化に起因した対象物の検出の信頼度の低下を回避でき、検出領域の環境変化に応じて閾値を手動で設定し直す手間がかからない個体検出器を提供する。
【解決手段】個体検出器1は、距離画像センサ2から得られる距離画像P1と背景距離画像P2との差分である差分距離画像P3を生成し、差分距離画像P3において距離値の絶対値が閾値th1,th2以上になる領域を対象物として検出する対象検出手段3と、対象検出手段3で用いられる閾値th1,th2を設定する閾値設定手段5とを備える。閾値設定手段5は、距離画像センサ2からそれぞれ異なるタイミングで距離画像P1を複数取得し当該複数の距離画像P1のうち背景物の同一画素について距離値のばらつきの程度を示す標準偏差を指標値として算出する算出部51と、閾値th1,th2を指標値に所定のマージンを加えた値に自動で設定する設定部52とを有する。
(もっと読む)
センサ
【課題】被写体までの距離の計測の精度が悪くなるのを抑制することが可能なセンサを提供する。
【解決手段】このセンサ100は、LED2から照射されて被写体により反射された反射光を検出することにより被写体までの距離を計測するための画素42を備え、画素42は、画素42に蓄積される信号電荷を衝突電離させて増加するための高電界領域422aを含む。
(もっと読む)
計測装置およびその計測方法
【課題】被検物の全体3次元形状を測定する計測装置、およびその計測方法を提供することを目的とする。
【解決手段】本発明に係る計測装置1は、被検物170を載置する支持ステージ151と、支持ステージ上に載置された被検物の3次元形状を光学的手法を用いて非接触で測定する測定部2とを備えており、測定部は支持ステージに対して測定方向が可変となるように構成され、また、予め設定した所定の位置関係で支持ステージ上に載置された少なくとも3つ以上の測定基準体160、161および162と、測定部により複数の測定方向から支持ステージ上に載置された測定基準体および被検物を測定し、得られた測定データから測定基準体の測定位置を合成基準として複数の測定方向からの被検物の測定データを合成することにより、被検物の全体3次元形状を求める合成部とを有している。
(もっと読む)
光ビーコン
【課題】 投受光器の大型化や構造の複雑化を招くことなく、アップリンク光を送信してきた車載機の位置をより精度よく認識することができる光ビーコンを提供する。
【解決手段】 本発明の光ビーコンは、アップリンク領域を設定すべく、車載機S1からのアップリンク光UOを受光する受光面7a1を有する投受光器を備えている。この受光面7a1の輪郭形状は、アップリンク領域の上流端側に対応する下端縁7a3が、アップリンク領域の上流端を道路Rの車両進行方向に対して略垂直に設定する形状とされている。
(もっと読む)
測距装置及び測距方法
【課題】変調光の出射から変調光の1周期以上遅延して反射光(遅延反射光)が到達しても正確に距離に測定できるようにして、距離測定の高精度化を図る。
【解決手段】第1測距装置は、強度変調された変調光12を出射する発光手段14と、変調光12により照射された被検出物16からの反射光18を受光する受光手段20と、変調光12と反射光18の位相差から被検出物16までの距離を算出する演算手段22と、ゲート制御部80とを有する。ゲート制御部80は、ゲートパルスを出力して、被検出物16に対して変調光12を間欠に照射するように発光制御部26を制御し、変調光12の間欠照射に基づいて、被検出物16からの反射光18の受光を間欠に制御するように電気光学シャッタあるいは撮像素子28の電子シャッタを制御する。
(もっと読む)
距離画像センサ
【課題】対象空間の各領域ごとの受光光量を適正化し、物体の遠近や反射率にかかわらず距離を計測することができる距離画像センサを提供する。
【解決手段】対象空間に光を照射する発光源2と、対象空間からの光を受光して受光光量に応じた電荷を生成する複数個の感光部11を有し対象空間を撮像する光検出素子1とが設けられる。距離計測期間において、発光源2は所定周期の強度変調光を対象空間に照射し、画像生成部3は各感光部11で生成された電荷を用いて距離画像を生成する。フィルタ要素6は、各感光部11に対象空間から入射する光の透過率を個別に調節可能であり、距離計測期間には透過率を一定に保つ。画像生成部3は、距離計測期間の前に設定した環境計測期間において発光源2から対象空間に光を照射させ、各感光部11で得られた電荷量の差が小さくなる方向に各感光部11に対応する領域の透過率を調節する。
(もっと読む)
障害物検出装置
【課題】 従来の視覚障害者用物体検知装置及び誘導装置は室内や歩行通路や階段等に装置を取りつける方法が多く、大規模な装置が報告されている。
【解決手段】本装置は視覚障害者や高齢者が歩行の際進行方向にある障害物を検出し使用者に報知する極小型なポータブルで安易に装着脱可能な安全で安定した視覚障害物検出装置である。この装置の特徴とするのは、使用者はその障害物までの距離と物体を身体に優しい音や振動で感受しその信号によって判別しうるものである。この装置の装着場所の選択肢は多種多様である。メガネ、帽子、ブローチ、靴、指輪、腕輪と使用者の好みの要望に応じて提供できる装置である。
(もっと読む)
車間距離測定システム
【課題】 劣悪な環境下でも安定して車間距離の測定を行うことができ、かつ、安価な車間距離測定システムを提供する。
【解決手段】 後方車両2の車間距離測定装置20のプロセッサ22は、イメージセンサ21により撮像される画像の中から前方車両1の左右のテールランプの画像を抽出し、左右のテールランプ画像の撮像画面内における距離Laを算出する一方、左右のテールランプの画像の強度の時間的変化の時間差tdを検出する。さらにプロセッサ22は、時間差tdに基づき、前方車両1の左右のテールランプ間の距離Lを算出し、距離LおよびLaに基づき、前方車両1との車間距離dを算出する。
(もっと読む)
ファイル生成方法および装置並びに立体画像の表示制御方法および装置
【課題】立体表示や三次元形状認識に利用される三次元情報が、その三次元情報を取得した撮像系に固有の座標系で表されていることに起因する種々の問題を解決する。
【解決手段】複数の撮像系に共通する共通座標系を定義し、撮像系に固有の座標系の原点Onを基準位置としたときの共通座標系の原点Ouの変位を表す変位情報を、ファイル生成装置内のメモリに記憶せしめておく。三次元情報を含むファイルを生成するときは、ファイルヘッダHの所定領域h8に、メモリに記憶されている変位情報を格納しておく。ファイルに記録された三次元情報を利用した処理を行うときには、変位情報を使って固有座標系で表現された三次元情報を共通座標系で表現された三次元情報に変換してから処理を行う。
(もっと読む)
光学デバイスおよび電子機器
【課題】小型化を図ることができると共に被検出物の検出時間を短縮できる光学デバイスを提供する。
【解決手段】一つの発光素子2、一つの二次元位置検出受光素子3およびIC4を備えている。このように、上記発光素子2を一つだけ使用しており、小型化を図ることができると共に、被検出物の検出時間を短縮できる。
(もっと読む)
物体認識装置
【課題】 単一の撮像手段により対象物との距離を考慮して該対象物を認識することが可能な物体認識装置を提供する。
【解決手段】 本発明に係る物体認識装置が適用された近赤外線暗視装置1は、近赤外線を照射する近赤外線投光器10と、単眼の近赤外線カメラ12と、車速に応じて近赤外線投光器10のランプパワーを調節する制御部21、および近赤外線カメラ12により撮像された画像から歩行者を認識する認識部22を有するECU20とを備える。制御部21は、TTC(衝突予測時間)が4秒未満の距離に存在する歩行者の輝度が飽和するように近赤外線投光器10のランプパワーを調節する。また、認識部22は、撮像画像中の輝度が飽和している歩行者については、TTC4秒未満の距離(所定距離内)に存在していると判定し、該歩行者を注意喚起対象から除外する。
(もっと読む)
撮像装置及び距離測定方法
【課題】カメラを配置する位置に制約を受けることなく距離を測定すること。
【解決手段】インカメラ201は、撮像する。アウトカメラ202は、インカメラ201が撮像する方向と反対方向を撮像する。距離測定部203は、撮像した各撮像対象物までの各々の距離を測定する。距離判定部204は、測定した各撮像対象物までの各々の距離を加算して加算値を求めるとともに、加算値に通信端末装置100の幅の長さを補正値として加算することによって、撮像対象物間の距離を算出する。画面生成部207は、インカメラ201で撮像した画像とアウトカメラ202で撮像した画像とを合成して合成画像を生成するとともに、生成した合成画像と撮像対象物間の距離を示す文字情報とを合成する。画像表示部209は、合成画像と文字情報とを合成した画像を表示する。
(もっと読む)
距離画像生成方法及びその装置
【課題】装置の大型化、高コスト化を招くことなく、精度の高い距離画像を生成することができる距離画像生成装置を提供する。
【解決手段】
カメラ10には2つの撮像部PA、PBが設けられ、撮像部PAと撮像部PBから、可視の波長域の光により結像された画像が取り込まれ、ステレオマッチング法を用いて距離画像Aが生成される。一方、撮像部PBは、赤外光により結像された画像を取り込むことができ、赤外光照射部18から被写体に照射されて反射した赤外光による赤外画像が取り込まれ、TOF法を用いて距離画像Bが生成される。そして、距離画像Aにおいて距離データが不足する画素を距離画像Bの距離データで補間する。
(もっと読む)
光波距離測定方法、距離測定プログラム及び距離測定装置
【課題】同時に多数の測定対象物について、多数回の距離測定を可能とし、又近接した測定対象物についても距離測定を可能とする。
【解決手段】所定の広がり角を有するパルスレーザ光線を発する光源部6と、1以上の測定対象物11からの反射光36′を受光する受光部9と、受光制御回路を有し、前記受光部からの最初の受光信号を基に前記測定対象物についての測定データを取得する測距部32と、前記測距部は前記受光部が1つのパルスレーザ光線で2以上の反射光を受光した場合、1つのパルスレーザ光線で最初に得られる受光信号を検出し、前記制御演算部は少なくとも1回検出した後は検出した受光信号について検出を制限し、制限後は制限した以外の発光後最初に得られる受光信号を検出可能とする様前記受光制御回路を制御し、発光パルス毎に弁別して受光信号を検出し、弁別した受光信号に基づき複数の測定対象物迄の距離を個別に測定する様構成した。
(もっと読む)
ターゲット捕捉装置
【課題】ターゲットに対する捕捉性能の向上と共に、飛翔体に設置するに好適するターゲット捕捉装置を提供すること。
【解決手段】ターゲット捕捉装置30は、アジマス方向回動軸受33および赤外レーザ光生成手段32aを備えた基台32と、この基台32のアジマス方向回動軸受33に軸支されるターゲット捕捉装置本体31とを具備する。ターゲット捕捉装置本体31は、ターゲット側から受信する赤外レーザ光bにてターゲットの測距を行うターゲット照準装置35と、当該ターゲット照準装置35を軸支するエレベーション方向回動軸受37とを備え、ターゲット照準装置35は、微動鏡41および反射光受信器40を有する微動鏡装置42とターゲットへ照準を合わせる照準方向微調整基台45とを備える。基台32側とターゲット捕捉装置本体31との間には、基台32側の赤外レーザ光生成手段32aにて生成された赤外レーザ光bをターゲット捕捉装置本体31側に導光する赤外導光路qを備える。
(もっと読む)
121 - 140 / 184
[ Back to top ]