
Fターム[5J084BA20]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学系 (4,875) | 投光系に関するもの (2,428) | 投光波長に関するもの (338) | 赤外線方式 (184)
Fターム[5J084BA20]に分類される特許
81 - 100 / 184
情報処理装置および物体検出方法

【課題】1組の発光素子および受光素子で、物体の存在有無に加えて、物体の距離を検出することを実現した情報処理装置を提供する。
【解決手段】近接センサ25は、1組みの発光素子251および受光素子252によって構成される。レギュレータ25Aは、制御信号に基づき、発光素子251に供給される駆動電力の電圧値を制御する。このレギュレータ25Aを介して、発光素子251の発光光量を所定の周期内において時分割で多段階に切り替え、この切り替えと同期を取って、この所定の周期内における受光素子252による反射光の受光状況を当該受光素子252が出力する検出信号を監視することにより検出し、その検出結果に基づき、物体の存在有無に加えて、物体の距離を多段階に検出する。
(もっと読む)
目標検出装置及び目標検出方法

【課題】低熱源目標を容易にかつ確実に検出可能な目標検出装置を提供する。
【解決手段】赤外線カメラ12の視野内に、光学装置11から赤外線レーザビームを放射してカメラ視野範囲を走査していき、低熱源目標Tに当たって反射する赤外線レーザビームの反射光を赤外線カメラ12に入射して目標情報検出器14により低熱源目標Tを検出するようにしている。
(もっと読む)
受光装置、情報取得装置および物体検出装置
【課題】フィルタの傾きの変化によって生ずる入射光の焦点ずれを抑制することができる受光装置、情報取得装置および物体検出装置を提供する。
【解決手段】情報取得装置1は、レーザ光源11から出射され目標領域から反射されたレーザ光を受光して信号を出力するCMOSイメージセンサ17と、レーザ光をCMOSイメージセンサ17へと導く受光光学系とを備える。ここで、受光光学系は、フィルタ15を具備する。フィルタ15は、レーザ光の進行方向に対して傾けられることにより透過波長帯域がシフトする。さらに、受光光学系は、フィルタ15の傾きの変化に伴う当該フィルタ15内での光路長の変化を補償するための透過板16を具備する。
(もっと読む)
測距装置
【課題】 可視光に色味の劣化の影響を与えずに光束を分別できる測距装置を提供する。
【解決手段】 測距装置は、測定光を照射する測定光源(1)と、対物レンズ(3)と、接眼レンズを有する視準光学系(6〜9)と、対物レンズの光軸に垂直な平面と平面及び対物レンズの光軸に傾斜する第一傾斜面とを有する光路分別部材(2)と、光路分別部材を介して目標物から反射された測定光を受光する受光素子(4)と、を備える。第一傾斜面は、視準光学系で使用する光の波長と測定光の波長とをそれぞれ分別する波長分別機能を有し、以下の条件を満足する。
(Sin−1(1/n)+Sin−1(1/n(SinθFNO)))/2<θ1<30°
θ1:対物レンズの光軸に対して垂直な平面と前記第一傾斜面とのなす角度;
FNO:対物レンズFナンバー;
θFNO:θFNO=tan−1(1/2FNO);
n:光路分別部材を構成する部材の測定光の波長の屈折率。
(もっと読む)
光学センサシステムにおいて光源を駆動する電流源
光学センサシステムにおいて光源を駆動する電流源回路が開示されている。電流源は、抵抗器に直列接続されたインダクタ、及びインダクタと抵抗器に対して並列結合されたダイオードを含む。電流源は、調整された直流(DC)電圧を受け、スイッチが閉じているときにインダクタを通じて電流を光源へ供給し、スイッチが開いているとき、インダクタを通じた電流をダイオードへ流すように構成されている。  (もっと読む)
(もっと読む)
光学センサシステムにおいて光源に流れる電流の上昇時間を早める高電圧源
光学センサシステムにおいて、高電圧源回路により光源が駆動される。高電圧源により、高電圧出力が、光源のオン期間の開始期間に光源へと供給され、光源に流れる電流の上昇時間が減じられる。光源オン期間の開始の後、高電圧出力が、回路から非接続とされ、電流源が、電流出力を光源へと供給し、その余の光源オン期間の期間、光源を駆動する。  (もっと読む)
(もっと読む)
光センサシステム用の二重電圧電流制御フィードバックループ
光センサシステム用の二重電圧電流制御フィードバックループが提供される。電源が直流(DC)安定化電圧出力を提供する。電流源が直流(DC)安定化電圧出力を受け、光源にスイッチド電流を提供する。電流源が光源を駆動する際は光源への電流を表す電流フィードバックがフィードバックパス上で電源に提供される。電流源が光源を駆動しない場合は直流(DC)安定化電圧出力を表す電圧フィードバックがフィードバックパス上で電源に提供される。  (もっと読む)
(もっと読む)
距離画像処理装置および撮影装置
【課題】距離画像内で、位置を限定することなく、所望の抽出条件に適合する対象物を特定、抽出する。
【解決手段】距離画像内で、距離値を用いて検出対象となる対象物の候補を抽出する。距離画像内で、近接する距離値が所定以上連続する画素群を対象物候補として抽出する。抽出した対象物候補は、さらにパターンマッチング、速度制限などを用い、絞り込む。得られた対象物候補の中から抽出条件に適合するものを対象物として抽出する。また、抽出条件として、先に抽出したものと同じものを抽出するよう構成してもよい。
(もっと読む)
人体存在検知装置及び人体存在検知方法
【課題】低コストで実現可能であると共に、人体が存在するか否かの検知を、操作者である人体が操作する電子機器等の制御に適合しやすい人体存在検知装置を、提供する。
【解決手段】基準位置から一定距離内に、人体が存在するか否かの判断を行う機能を備えた人体存在検知装置1を、基準位置から一定方向に存在する人体または物の存在位置に対する基準位置からの離間距離を一定時間経過毎に測定する離間距離測定手段2、該測定された離間距離に基づき一定距離内外判定結果と動静判定結果とを形成する判定結果形成手段3、該一定距離内外判定結果と、該動静判定結果とで構成される検知状態情報を形成する検知状態情報形成手段4、該検知状態情報に基づき状態遷移パターンを形成する状態遷移パターン形成手段5、及び、該状態遷移パターンに基づき、基準位置から一定距離内に、人体が存在するか否かを判断する判断手段6で構成する。
(もっと読む)
車両用距離画像データ生成装置及び方法
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置を提供すること。
【解決手段】 投光器5と、反射光を撮像するイメージインテンシファイア7b及び高速度カメラ8と、撮像タイミングを制御するタイミングコントローラ9と、イメージインテンシファイア7b及び高速度カメラ8により得られたターゲット距離の異なる複数の撮像画像における同一画素の輝度に基づいて、画素毎の物体までの距離を表す距離画像データを生成する画像処理部10を備え、画像処理部10は、低視程要因の距離画像データへの影響を抑制するステップS3,S4の処理を備えた。
(もっと読む)
移動体用照明装置
【課題】照明装置内部のスペースの問題や意匠上の問題等を解決する移動体の周辺情報を検出する手段を備えた移動体用照明装置を提供する。
【解決手段】移動体用照明装置は、光源と、ハウジングと、カバーと、情報検出手段と、反射板とを備える。ハウジングは光源の光を移動体周辺に照射するための開口部を有し、光源を収容する。カバーは、開口部を塞ぎ、光源の光を透過する。情報検出手段は、ハウジングの底面に埋設され、移動体周辺に所定波長の電磁波を出射することにより移動体の周辺情報を検出する。反射板は、カバーと光源との間に配設される。また、反射板は、電磁波がカバーを通じて移動体周辺に出射されるように電磁波を反射し、かつ、光源が照射する可視光を透過する。
(もっと読む)
車両用距離画像データ生成装置
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置を提供すること。
【解決手段】 投光器5と、イメージインテンシファイア7b及び高速度カメラ8と、タイミングコントローラ9と、イメージインテンシファイア7b及び高速度カメラ8により得られたターゲット距離の異なる複数の撮像画像における同一画素の輝度に基づいて、画素毎の物体までの距離を表す距離画像データを生成する画像処理部10を備え、画像処理部10は、ターゲット距離の異なる複数の撮像画像それぞれに対して輝度と頻度から物体以外のデータを距離画像データの生成から除外するステップS4〜S6の処理を備えた。
(もっと読む)
船舶の航路上の物体の検知と画像化のシステム
高速船舶及び他の船舶の航路内の物体(16)の検知と画像化及び、航海安全にリスクとなる物体の警告システムであって、船舶は航行及び通信システム(28)を備え、物体のレーザ照明用の走査ユニット(10)、制御ユニット(11)、オペレータパネル(12)を有する。走査ユニットは、システムの視野の内にレーザビーム(33)を放出するように調整された目に安全な赤外レーザの光源(30)と、レーザビームの出力パワーの監視と、物体までの距離の測定用のトリガパルスの生成と、反射放射エネルギーを受信/検知し、物体との距離を放射光と反射光の時間差に基づいて計測し、パルスエネルギーとピーク効果を計測し、第1(19)と第2(20)の走査機構により、レーザビームと光学検知器(38)の瞬時の視野を問題の走査領域に亘って走査し、船舶に対する瞬時の放射方向に関する方向情報を獲得する。 (もっと読む)
深さ映像獲得装置および方法
深さ映像獲得装置が提供される。第1光照射部は第1照射光を照射し、第2光照射部は第2照射光を照射し、受光部は、前記第1照射光による第1反射光および前記第2照射光による第2反射光を受光する。一方、処理部は、前記受光部の第1画素から提供される電荷量に基づいて前記第1画素に対応する深さ値を算出する。 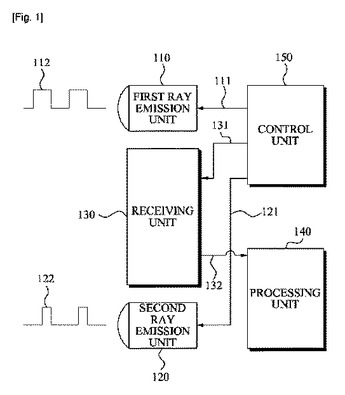 (もっと読む)
(もっと読む)
距離画像センサ
【課題】多種多様なアプリケーションに対して、それぞれ適切な検出距離範囲を実現することができる距離画像センサを提供する。
【解決手段】光量調節部7は、投光部2から対象空間に投光される光量を調節することにより、受光部3で受光される光量を調節する。距離画像センサ1には手動設定部8が設けられ、光量調節部7で調節される光量はこの手動設定部8の操作に応じて設定される。ここに、検出距離範囲を近距離側にシフトする場合には、受光部3の飽和を回避するように投光部2からの光量を減少させ、また、検出距離範囲を遠距離側にシフトする場合には、受光部3の感度不足を回避するように投光部2からの光量を増加させることで、距離画像センサ1の検出距離範囲を変化させることができる。
(もっと読む)
赤外線撮像装置および赤外線撮像方法
【課題】監視領域内の全体像と共に、所望の距離に存在する対象物の画像を選択的に撮像する。
【解決手段】監視領域内に存在する物体から発せられる赤外線を第1の検知素子131で受光し、この赤外線を光電変換して電気信号を出力する第1の赤外線検知器13と、この電気信号を変換し、赤外線受光画像用信号を生成する第1の信号処理器15Aと、第1の赤外線検知器13に係る赤外線と異なる波長の赤外パルスレーザ光を生成し、監視領域内へ照射するレーザ照射器12と、物体から赤外パルスレーザ光の反射光を第2の検知素子141で逐次受光し、この反射光を光電変換して電気信号を出力する第2の赤外線検知器14と、この電気信号を変換し、赤外線反射画像用信号を生成する第2の信号処理器15Bと、を備え、複数の第1の検知素子131および第2の検知素子141は外表面に市松状で配置されている。
(もっと読む)
車両用距離画像データ生成装置および車両用距離画像データの生成方法
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置および車両用距離画像データの生成方法を提供する。
【解決手段】 投光器5と、イメージインテンシファイア7b及び高速度カメラ8と、タイミングコントローラ9と、イメージインテンシファイア7b及び高速度カメラ8により得られたターゲット距離の異なる複数の撮像画像ごとにオブジェクトを検出し、オブジェクトの輝度に基づいて、前記オブジェクトまでの距離を表す距離画像データを生成する画像処理部10を備えた。
(もっと読む)
バックグランド放射光の抑制に有利なTOF領域
放射光の飛行時間を測定する方法は、第1の変調信号に応じて変調光(51)を放出するステップと、シーン(55)に変調光(51)を投影するステップと、放射光を受光するステップとを含み、受光した上記放射光は、少なくとも、シーン(55)によって反射された変調光を含んでいる。受光した上記放射光(26、27)は、放射光により誘起する電気信号に変換される。上記放射光により誘起する電気信号は第2の変調光と混合され、従って、混合信号を生成する。混合信号は、積分され、従って、積分信号を生成する。上記積分信号が閾値(Vref)を超えるとき、電荷は積分信号に注入される。上記方法は、第1及び第2の変調信号の変化を時間内に1または複数の期間で適合するステップと、時間内の1または複数の期間で積分信号を測定するステップとを含み、従って、少なくとも1つのTOFペアの信号の差(62)を取得するステップを含んでいる。上記測定するステップは、単一の検出器ノード(38)を使用するステップと、TOFペアの信号の差(62)を取得するために、メモリエレメント(25)を連結させるステップを含んでいる。上記方法は、更に、放射光の飛行時間を決定するための1または複数のTOFペアの信号の差を使用するステップを含む。  (もっと読む)
(もっと読む)
車両用距離画像データ生成装置および車両用距離画像データの生成方法
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置および車両用距離画像データの生成方法を提供する。
【解決手段】 自車両前方に所定周期でパルス光を投光する投光器5と、撮像エリアに応じて設定される撮像タイミングで撮像エリアから帰ってくる反射光を撮像する高速度カメラ8と、撮像エリアが連続的に変化するように撮像タイミングを制御するタイミングコントローラ9と、高速度カメラ8により得られた撮像エリアの異なる複数の撮像画像における同一画素の輝度に基づいて、画素毎の物体までの距離を表す距離画像データを生成する画像処理部10と、を備える。
(もっと読む)
車両用距離画像データ生成装置
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置を提供する。
【解決手段】 自車両前方に所定周期でパルス光を投光する投光器7と、撮像エリアに応じて設定される撮像タイミングで撮像エリアから帰ってくる反射光を撮像する高速度カメラ8と、撮像エリアが連続的に変化するように撮像タイミングを制御するタイミングコントローラ9と、高速度カメラ8により得られた撮像エリアの異なる複数の撮像画像における同一画素の輝度に基づいて、画素毎の物体までの距離を表す距離画像データを生成する画像処理部10と、を備え、タイミングコントローラ9は、走行環境に応じて各ターゲット距離の撮像時間の長さを異ならせる。
(もっと読む)
81 - 100 / 184
[ Back to top ]