
Fターム[5J084BA20]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学系 (4,875) | 投光系に関するもの (2,428) | 投光波長に関するもの (338) | 赤外線方式 (184)
Fターム[5J084BA20]に分類される特許
21 - 40 / 184
情報取得装置、投射装置および物体検出装置
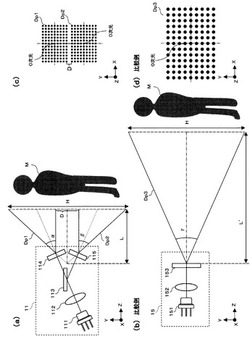
【課題】検出対象物が近距離にある場合においても、大きな目標物の距離情報を取得できる情報取得装置、投射装置および物体検出装置を提供する。
【解決手段】投射光学系11は、レーザ光源111と、コリメータレンズ112と、レーザ光を分離させるハーフミラー113と、分離されたレーザ光をドットパターン光Dp1に変換して目標領域に投射するDOE114と、分離されたレーザ光をドットパターン光Dp2に変換して目標領域に投射するDOE115と、を備える。複数のDOE114、115を用いることにより、広い角度範囲で、目標領域にドットパターンを照射できる。これにより、情報取得装置は、検出対象物が近距離にあるような場合においても、検出対象物の距離情報を適正に取得することができる。
(もっと読む)
レーザレーダの光軸検査方法及び検査システム

【課題】簡易な手法によって視認性よく合否を判定することが可能な検査システム等を提供する。
【解決手段】検査システム1は、自動車AMに取り付けられたレーザ装置5の基準光軸に関する検査を行うためのシステムであって、自動車AMの位置を検出する車両検出部41と、自動車AMの基準設置軸上において対象物TGの位置を調整する対象物調整部30とを備える。検査システム1では、光軸検査工程において、制御装置が、車両検出部41から入力された検出データに基づく演算値を対象物調整部30に出力することで、自動車AMに対して所定の検査距離に対象物TGを配置する。そして、レーザ装置5に、カメラ軸がレーザ装置5の基準光軸と一致するように検査用カメラ20を取り付け、その撮像画像内の中心領域に対象物TGが位置する場合に、レーザ装置5の基準光軸と自動車AMの基準設置軸とが一致することになるので、検査合格とするようにした。
(もっと読む)
距離測定装置
【課題】複数視野を同時に測定することができる距離測定装置を提供する。
【解決手段】距離測定装置は、測定光を射出するレーザ光源と、測定対象物からの反射光を検出する光検出器と、第1の反射鏡、第1の反射鏡の周囲に配置された第1の保持枠、第1の反射鏡を第1の保持枠に対し垂直軸の周りに回転可能に軸支する第1の支持梁、第1の保持枠の下部表面に配置された第2の反射鏡、第1の保持枠の上部表面に配置された第3の反射鏡、第1の保持枠の周囲に配置された第2の保持枠、及び第1の保持枠を第2の保持枠に対し水平軸の周りに回転可能に軸支する第2の支持梁を備えた光走査装置と、レーザ光源から射出された測定光を光走査装置に導光すると共に光走査装置で受光された反射光を光検出器に導光する導光光学系と、レーザ光源及び光走査装置の各々を駆動制御すると共に光検出器の検出信号に基づいて測定対象物までの距離を演算する制御部と、を備える。
(もっと読む)
距離画像カメラおよび距離画像合成方法
【課題】1つ以上の物体までの距離や表面反射率に関わらず、距離画像のほぼ全体にわたって良好な距離精度を得ることが可能な距離画像カメラおよび距離画像合成方法を提供する。
【解決手段】発光部11と、反射光が戻るまでの時間から算出される距離情報を画素毎に有する距離画像を取得する撮像部12と、露出調節部13と、露出を段階的に変更しながら撮像した複数の距離画像において、同一の画素位置に対応する各画素の距離情報の重み付き平均値をそれぞれ算出するとともに、そうして算出された重み付き平均値を各画素の距離情報とするように合成した合成距離画像を求める演算制御部15とを備え、各画素は前記反射光の受光強度を示す受光レベル情報も有し、各画素の距離情報の重み付き平均値の算出では、その画素の前記受光レベル情報に応じて前記距離情報の精度に対応するように算出される重み付け係数が用いられる。
(もっと読む)
撮像対象物の境界検知装置および境界検知方法
【課題】距離画像カメラとこれより高解像度の赤外カメラなどを組み合わせることで撮像対象物の境界などを的確に検知可能な境界検知装置および境界検知方法を提供する。
【解決手段】第1光を照射する第1発光部11aと、その反射光が戻ってくるまでの時間の測定値から算出される距離情報を2次元配置された第1種画素毎に有する距離画像を取得する第1撮像部11bと、撮像光軸が平行になるように配置されるとともに前記距離画像の前記第1種画素より多数の2次元配置された第2種画素毎に階調情報を有する通常画像を取得する第2撮像部12aと、これらを制御するとともに前記距離画像および前記通常画像に対する演算処理を行う演算制御ユニット13とを備え、この演算制御ユニット13は輪郭抽出部、輪郭対応画素抽出部、最短距離画素暫定選択部、最短距離画素選択確定部および輪郭認識部を有する。
(もっと読む)
距離画像カメラおよびこれを用いた対象物の面形状認識方法
【課題】様々な形状の箱などが混載されている場合であっても、それらを正確に分離して認識可能な距離画像カメラおよびこれを用いた対象物の面形状認識方法を提供する。
【解決手段】対象物へ向けて光を照射する発光部11と、反射光が戻ってくるまでの時間の測定値から算出される距離情報を画素毎に有する距離画像を取得する撮像部12と、取得した前記距離画像の各画素の前記距離情報が前記距離画像カメラからの距離を複数に分割した距離区間のいずれに対応するかを判定し、前記距離区間毎に前記距離情報が対応する画素数をそれぞれ集計した集計結果が最大であった前記距離区間いずれかを選択するとともに、そうして選択された前記距離区間のみに前記距離情報が対応する画素の2次元配置位置に基づいて前記対象物が前記距離画像カメラに対向している面の形状を認識する画像処理を行う演算制御部13とを備える。
(もっと読む)
双方向型物体検知センサ
【課題】 双方向で投受光することが可能な双方向型物体検知センサ、同一構造で互換性のある双方向型物体検知センサ、受光信号を同一投受光装置内や別の投受光装置における投光信号に加えることが可能な双方向型物体検知センサの提供。
【解決手段】 少なくとも投光器と受光器と投光制御部と受光制御部を有する単位投受光器が、対向してまたは並行に複数配置された1組の投受光装置であって、一方の単位投受光器の投光光は他方の単位投受光器により受光され、当該他方の単位投受光器の投光光は前記一方の単位投受光器により受光され、かつ、前記各単位投受光器における投光器の向きと受光器の向きが同一である双方向型物体検知センサを提供する。
(もっと読む)
光学式位置検出装置
【課題】対象物体が検出用光源を配置した領域の外側に位置しても内側に位置しても対象物体の位置を検出できる光学式位置検出装置を提供する。
【解決手段】光学式位置検出装置10において、検出用光源部12が検出光L2を射出した際に対象物体Obで反射した検出光を光検出部30で検出して対象物体Obの座標を検出する。検出空間10Rからみたときに、光検出部30は、複数の検出用光源部12より内側に位置するとともに、複数の検出用光源部12は各々、第1の発光素子12A1〜12D1と第2の発光素子12A2〜12D2とを備えている。従って、第1の発光素子12A1〜12D1が点灯した際の光検出部30での受光強度と第2の発光素子12A2〜12D2が点灯した際の光検出部30での受光強度との比較結果に基づいて対象物体Obが検出用光源部12より外側に位置しても内側に位置しても対象物体Obの位置を検出することができる。
(もっと読む)
固体撮像装置
【課題】光電変換素子で発生した光電子の転送の際に、光電変換素子に残留する光電子数を軽減させるとともに、光電子の転送の高速化を図る固体撮像装置を提供する。
【解決手段】光を検知して光電子を発生する光電変換素子を有する単位画素と、前記単位画素を駆動する画素駆動部と、を備え、前記光電変換素子は、フォトゲート構造により形成され、前記画素駆動部は、3値の電圧のうち、いずれかの電圧を前記光電変換素子のフォトゲートに印加させることで、前記光電子の発生、転送を行い、前記3値の電圧は、少なくとも、第1電圧と、前記第1電圧より高い第2電圧と、前記第1電圧より大きく且つ前記第2電圧より小さい第3電圧とを有する。
(もっと読む)
距離測定装置
【課題】測定対象物までの距離に拘らず、光検出器のダイナミックレンジの範囲で、測定対象物までの距離を精度よく測定することができる距離測定装置を提供する。
【解決手段】距離測定装置は、測定対象物に対し測定光を投光する光投光部と、等速で回転移動して対象物で反射された反射光を複数方向に反射可能に構成された可動鏡と、可動鏡で反射された反射光を集光する集光素子と、集光素子の焦点面に配置された予め定めた面積の受光領域を備え、受光領域で受光された光を検出する光検出部と、測定範囲の上限距離に在る対象物からの反射光を受光した場合には受光領域への結合効率が最大となる位置に可動鏡を移動させ、測定範囲の下限距離に在る対象物からの反射光を受光した場合には受光領域への結合効率が小さくなる位置に可動鏡を移動させる駆動制御部と、計測時間から測定対象物までの距離を演算する演算部と、を備える。
(もっと読む)
プラットホームドア用安全装置
【課題】 従来より耐久性を向上することができるプラットホームドア用安全装置を提供する。
【解決手段】 プラットホームドア用安全装置30は、プラットホームドア20に設置されてプラットホームドア20の近傍に存在する物体を検出するタイムオブフライト方式の三次元センサ40と、入射光に対して反射光を減衰する光減衰部50とを備えており、三次元センサ40は、所定の範囲に赤外光を発する複数のLEDと、複数のLEDから発せられて物体によって反射された赤外光を受ける複数の受光素子とを備えており、複数の受光素子は、前記所定の範囲のうち各々の担当の範囲からの光を受け、複数のLEDは、複数の受光素子の各々の担当の範囲に光を同時に発し、光減衰部50は、複数のLEDから発せられた赤外光の少なくとも一部が入射する位置に配置されていることを特徴とする。
(もっと読む)
光学式位置検出装置および入力機能付き表示システム
【課題】受光素子に対する電気ノイズに対する影響を阻止することにより、誤検出の発生を防止することのできる光学式位置検出装置、および当該光学式位置検出装置を備えた入力機能付き表示システムを提供すること。
【解決手段】光学式位置検出装置において、受光部13は、検出光が放射状に出射された検出対象空間に位置する対象物体で反射した検出光を受光する。受光部13には、受光素子130の受光面131を部分的に覆うシールド部材14が設けられている。シールド部材14において、入射部140は、受光面131に対する法線方向から一方側および反対側に傾くに伴って幅広になっている。従って、受光素子130での受光強度は、受光面131に対する法線方向から入射した検出光と、受光面131に対する法線方向から傾いた斜め方向から入射した検出光とにおいて差が小さい。
(もっと読む)
位置検出システム及び投射型表示システム
【課題】複数の検出対象物の位置をそれぞれ検出することができる光学式の位置検出システムを提供する。
【解決手段】光学式の位置検出システム1000は、第1検出対象物31と第2検出対象物32とに向けて光を射出する光射出部20と、波長の異なる第1検出対象物31からの第1反射光41を受光する第1受光部51と第2検出対象物32からの第2反射光42を受光する第2受光部52を有し、前記第1検出対象物31は前記第1反射光41を反射する第1反射フィルター61を有し、前記第2検出対象物32は前記第2反射光42を反射する第2反射フィルター62を有する。
(もっと読む)
パノラマ画像作成方法及び3次元レーザスキャナ
【課題】測定範囲に対応するパノラマ画像中のコントラストが最適となる様にするパノラマ画像作成方法及びパノラマ画像中のコントラストが最適となる画像データを取得する。
【解決手段】測定対象物72,73,74を含む様に測定範囲70を設定し、測定範囲を所要分割して複数の区画71を設定し、各区画毎に撮影した画像を合成してパノラマ画像80を作成するパノラマ画像作成方法に於いて、各区画毎に複数の撮像条件で撮影し、少なくとも測定対象物については、最適な撮像条件で撮影された画像が用いられてパノラマ画像が合成される。
(もっと読む)
光学式位置検出装置
【課題】検出用発光素子と受光素子との位置関係を適正化することにより、対象物体の位置を広い領域にわたって検出することのできる光学式位置検出装置を提供する。
【解決手段】光学式位置検出装置10において、X軸方向で離間する第1発光受光部15Aと第2発光受光部15Bとを順次排他的に駆動した際の駆動結果と、Y軸方向で離間する第3発光受光部15Cと第4発光受光部15Dとを順次駆動した際の駆動結果とに基づいて、対象物体ObのX座標およびY座標を検出する。複数の発光受光部15のいずれにおいても、検出用発光素子12と受光素子30とが隣り合う位置に配置され、対象物体Obで反射して第1受光素子30Aに到達する光は、対象物体Obにおいて第1検出用発光素子12Aおよび第1受光素子30Aが位置する側に向けて反射した光である。このため、第1受光素子30Aの受光強度は、対象物体Obの位置によって単調に変化する。
(もっと読む)
情報処理システム、情報処理プログラム、情報処理装置、入力装置、および情報処理方法
【課題】ユーザの動作をより細かく判定することができる情報処理システム、情報処理プログラム、情報処理装置、入力装置、および情報処理方法を提供する。
【解決手段】情報処理システムの一構成例は、ユーザの身体の少なくとも一部を乗せることが可能な第1の入力装置と当該第1の入力装置から得られたデータを処理する情報処理装置とを含む。第1の入力装置は、ユーザの身体の少なくとも一部を乗せる第1の台部、および距離データ出力手段を備える。距離データ出力手段は、第1の台部の台面に対して離間する方向に位置する物体までの距離にしたがって決められる距離データを出力する。情報処理装置は、データ取得手段および処理手段を備える。データ取得手段は、距離データ出力手段から出力された距離データを取得する。処理手段は、データ取得手段が取得した距離データに基づいて、所定の処理を行う。
(もっと読む)
レーザレーダ
【課題】障害物がレーザレーダに接近した位置に有る場合も、障害物までの距離を精度よく測定することができるレーザレーダを提供する。
【解決手段】レーザレーダ1は、レーザ光を出射するレーザ光源21と、目標領域においてレーザ光を走査させるミラーアクチュエータ24と、目標領域において反射されたレーザ光を受光する光検出器33と、レーザ光のパルス幅を制御するとともに、光検出器33から出力される信号に基づいて目標領域における障害物までの距離を測定するDSP106と、を備える。DSP106は、目標領域における障害物までの距離に適するパルス幅を決定し、決定したパルス幅のレーザ光により障害物との距離を測定する。
(もっと読む)
障害物検知装置
【課題】表面状態の検出を可能とし得て、しかも、障害物とレーザとの間に設けた出射面の表面状態をリアルタイムに検出することができ、その表面状態に対応したレーザ光を照射する障害物検知装置を提供する。
【解決手段】本発明は、レーザ光源2と、レーザ駆動部3と、レーザ光源2から照射されたレーザ光をビーム偏向するビーム偏向素子4と、電圧制御部5と、出射面9と、受光面10と、検出器7と、コントロール部6と、を備え、ビーム偏向素子4の偏向角の一部のレーザ光を利用して出射面9の表面状態を計測するように出射面9に対して斜めから入射する反射ミラー11,12,13と、出射面9で反射したレーザ光を受光する検出器8と、を備え、コントロール部6は、電圧制御部5での電圧制御により出射面9の表面状態を計測した後に出射面9を透過する前方検出用のレーザ光を出力する。
(もっと読む)
航空機搭載用大気浮遊物質検知ライダー
【課題】本発明の目的課題は、航空機が飛行中に前方の氷晶や火山灰等に代表される大気中の浮遊物質を検知する装置を提供することにある。
【解決手段】本発明の大気浮遊物質検知方法は、レーザ光を利用した航空機搭載ドップラーライダーにおいて、レーザ光を大気中に放射する送信光と遠隔領域の大気浮遊物質によって散乱された受信光との偏波面の角度差からレーザ光を反射散乱させた物質の成分を遠隔計測することを特徴とする。
(もっと読む)
乗員頭部検知装置
【課題】演算負荷の増大を防止しつつ検知精度を向上させる。
【解決手段】乗員頭部検知装置10は、単眼距離画像センサ11から出力される距離画像を構成する複数の画素毎に3次元空間での法線ベクトルの逆方向に固定長の逆ベクトルを算出し、該逆ベクトルにより指定される3次元空間での位置座標を内部座標とする内部座標設定部52と、3次元空間を構成する複数の単位空間毎に該単位空間内に含まれる内部座標の総数に係るスコア値を算出し、複数の画素毎に対応する内部座標が含まれる単位空間のスコア値を複数の画素毎に対応させて示すスコア画像を生成するスコア画像生成部53とを備え、スコア画像を構成する複数の画像領域のうちからスコア値に基づいて車室内の乗員の頭部領域を抽出する。
(もっと読む)
21 - 40 / 184
[ Back to top ]