
Fターム[5J084BA20]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学系 (4,875) | 投光系に関するもの (2,428) | 投光波長に関するもの (338) | 赤外線方式 (184)
Fターム[5J084BA20]に分類される特許
161 - 180 / 184
レーザ測定装置

【課題】測定可能な距離が長く、かつ、小型であって長寿命のレーザ測定装置を提供する。
【解決手段】VCSEL11と、これが発するレーザビームの線幅を狭窄化する外部共振器とを備えた光源部10とする。この外部共振器は、光ファイバーの両端付近に回折格子であるグレーティング14が配置されたファイバーグレーティング型の共振器である。これにより、レーザビームの線幅を細くでき、測定可能な距離を長くできるとともに、小型かつ長寿命にできる。
(もっと読む)
移動ロボットの距離および位置検出装置

【課題】光を用いた2つの方法により周囲距離および自己位置検出をより正確に行う。
【解決手段】移動ロボット1が光ビーコン3の光信号の規定領域BAに入っていないときには、ジャイロセンサ16の出力する角速度を積分して求めた方位角及びステッピングモータ12の駆動用パルスの計数値に対応する移動距離に基づいて移動ロボット1の位置を求めているので、如何なる位置でも求めることができる。また、移動ロボット1が光信号の規定領域BAに入っているときには、光信号による三角測量を行って、光ビーコン3からの移動距離LBを求め、この移動距離LB及び規定領域BAに基づいて移動ロボット1の位置を高精度で求めて更新する。移動ロボット1が光ビーコン3の光信号の規定領域BAに入っていないときには、光信号による三角測量を行って、周囲距離を測定する。
(もっと読む)
一体型レーザ/赤外線前方監視光学装置
【課題】FLIR/レーザーに基づく目標化および撮像システムにおいて、IRのLOSとレーザーのLOSとの固定された整合誤差およびダイナミック整合誤差を低減することにより、当該エリア内の目標を認識する能力を大幅に改善する。
【解決手段】IRのLOSとレーザーのLOSの間の固定された整合誤差は、改善された内部ボアサイトモジュール(図10)および対応するボアサイト方法により低減される。ダイナミック整合誤差はレーザーエネルギーおよびIRエネルギーの双方に対する単一ピッチ(405)ベアリングおよび共通ピッチ/ヨーアフォーカル(401)を使用する光電気サブシステムによって低減される。
(もっと読む)
センサ装置
電磁放射線、具体的には、光、の発信源と、個別に評価されることのできる電磁放射線用の複数の受信部と、電子ユニットと、を備え、当該電子ユニットは、発信源を使って電磁放射線を放射し、発信源から放射された電磁放射線が物体の反射表面から受信部のそれぞれに至るまでに進んだ距離を、電磁放射線の伝播時間、及び/または、変調された電磁放射線の振動の位相を評価することにより決定するように構成されてなるセンサ装置(1)が提案される。本発明によれば、浮遊物のような、空間的に媒体中に分布する反射物、を検知するための電子ユニットが、第1のグループ(9、10、11)の距離を、予め定めた分布をなして配置されたものとして、具体的には、予め定めた複数の受信部においてほぼ同一の大きさとなる、1つよりも多いグループの要素があるものとして、測定された距離から決定した場合には、浮遊物のような反射物を検知したことに関連した信号を発する。  (もっと読む)
(もっと読む)
距離測定による通過方向判別装置
【課題】本発明による距離測定による通過方向判別装置の課題は、複数の通過体が重複して通過する場合においても、個々を区別した状態で通過体の通過方向を検知することが可能なものを提供することにある。
【解決手段】検出信号を発生する検出信号発生器と通過体による前記検出信号の反射信号を受信する受信器との対からなる複数個の検出ユニット、又は、検出信号を発生する1個の検出信号発生器と前記検出信号発生器を共用し、通過体による前記検出信号の反射信号を受信する複数の受信器による複数個の検出ユニットと、距離差計算器と、応答順判定器と、方向及び個判定器とを有することを特徴としている。
(もっと読む)
防犯センサ
【課題】
距離情報と大きさ情報とを同時に取得できて、検知精度を向上させると共に情報処理を容易に行うことができ、かつセンサの小型化が図れてコスト的に有利な防犯センサを提供する。
【解決手段】
警戒エリア内に存在する物体までの距離と該物体の大きさとを同時に測定可能な距離画像センサと、該距離画像センサで得られた距離画像の距離情報と大きさ情報とに基づき、物体が人体より大きいか人体より小さいかを区別して侵入者か否かを判定する判定手段と、を備える。距離画像センサは、投光手段から投光された光の反射光を受光手段で受光することによって得られた距離画像の全画素について距離測定を行い、また、背景光を除去可能なCMOS撮像素子によって形成される。
(もっと読む)
自走式掃除機
【課題】高価な障害物センサを用いることなく、掃除されない範囲を小さくすることのできる自走式掃除機を提供する。
【解決手段】自走式掃除機の赤外線センサ11から障害物100までの距離が短くなっていくときに、フォトトランジスタ52で受光される障害物100からの反射光の受光量が限界距離を境として増加から減少に転じるように、LED51とフォトトランジスタ52とが配置され、且つ反射光を遮る遮光筒57がフォトトランジスタ52に取り付けられている。掃除機を制御するマイコンは、フォトトランジスタ52の出力レベルが増加から減少に転じたことを検出した後に掃除機の移動を停止するなどの措置をとる。この限界距離が短い距離(例えば1cm)となるように赤外線センサ11を構成することにより、掃除されない範囲が小さくなる。
(もっと読む)
障害物報知装置
【課題】 レーダで歩行者などの障害物を検出し、さらにこの障害物の危険判定を行って、必要な場合にのみ障害物に対して可視光を照射する障害物報知装置であって、簡素な構成でかつ光軸調整が容易な障害物報知装置を提供する。
【解決手段】 可視光用光源(可視光LED9)と、この可視光用光源からの可視光を、レーザレーダ装置の投光側光学系(凸レンズ13)におけるレーザ光源(赤外LD8)からの出力光と略同一位置に導いて、レーザ光源からの出力光と並列に前記投光側光学系に入力する導光手段(ライトガイド10b)と、レーザレーダ装置によって測定された距離と方位に基づいて、検出された障害物のうち警告が必要な危険物を判定し、少なくとも当該危険物を含む対象物に対して前記投光側光学系によって可視光を照射すべく、前記可視光用光源を駆動制御する可視光制御手段(制御回路3)とを設ける。
(もっと読む)
自動車用センサ
自動車に調節可能に取付けられている自動車用センサが紹介された。センサは少なくとも1つの撮像器(4)を含み、かつ/又はセンサは可視又は赤外線スペクトル範囲に対して設計されている。光源(3)特にLEDが、センサに対して固定的に規定された位置に設けられて、可視スペクトル範囲にある基準光線(11)を発生し、かつセンサの調整のために動作可能である。特に車両に設置されるカメラ、ライダシステム及びレーダシステムにおける使用が考えられ、調節のため普通の前照灯調節装置(9)が使用される。  (もっと読む)
(もっと読む)
自動車の内外シーン3次元検出に用いられる自動車用装置
自動車の内及び/又は外シーン(4)を空間的に検出する自動車内装置であって、電子式検出装置(9)に連結されたLIDARセンサ(1)と、画像処理装置(11)に接続され、シーンの画像を記録・評価する画像センサ(12)を有する。シーン(4)の空間データを判別するため、検出装置(9)と画像処理装置(11)はコンピュータ(10)に連結される。  (もっと読む)
(もっと読む)
光伝送システムおよび光伝送方法
【課題】ターゲットに対して照射するレーザ光の照射精度を向上させると共に、光伝送システム全体の小型軽量化を図る。
【解決手段】光伝送システム10は、航空機等の飛翔体に設置される基台11と、この基台11上にアジマス方向に回動自在に支持されるシステム本体12とから構成される。 基台11は、アジマス方向回動軸受13と、光発生・送出装置14と、光軸補正データ生成手段15とを備える。 アジマス方向回動軸受13には、メインレーザ光mおよびガイドレーザ光gを導光する軸孔13aが設けられる。 光発生・送出装置14は、メインレーザmを生成する。 光軸補正データ生成手段15は、光検出器20と画像処理装置21と、光軸補正処理装置22とを備えている。
(もっと読む)
交通信号機制御装置、交通信号機制御方法、及び、プログラム
【課題】 交通信号機付近における被検知体に関する情報を正確に認識して交通信号機を制御することが可能な交通信号機制御装置、交通信号機制御方法、及び、プログラムを提供する。
【解決手段】 交通信号機制御装置10の動作パターンモデル記憶部13は、人間行動モデル104a、動物行動モデル104b、自動車モデル104c、及び、環境要因モデル104dを記憶する。解析部11は、交通信号機20付近に設置された焦電センサ101から出力される信号を解析する。被検知体認識部14は、解析部11による解析結果と、動作パターンモデル記憶部13に記憶されている動作パターンモデルとに基づいて、被検知体の動作内容を認識する。交通信号機制御部15は、認識結果に基づいて交通信号機20を制御する。
(もっと読む)
赤外光IDタグ位置検索装置
【課題】 従来から電波若しくは電磁誘導を用いた検索装置はRF−IDによる多重通信による一括読取装置として既に開発されているがIDタグの近接、或は狭い場所に多くのタグを並べた場合、電波の相互干渉の問題が発生し、完全なものに至っていない。本考案は赤外光IDタグを用いる事により、これを解決している。
【解決手段】 本考案は特開2003−120088で開発された赤外光IDタグを使い、同タグのデータ転送ダイオードに可視光ダイオードを用い、目視出来る様にして検索を可能としたもので、通信手段に赤外光及び可視光を使用している為、指向性が強くIDタグ間の相互干渉が発生しない事がRF−IDの課題を大きく改善している。
(もっと読む)
VCSEL型ダイオードアレイを用いた物体検出システム
VCSEL型ダイオードアレイを有する物体検出システムに関する。
車両搭載型物体検出システム(200)は監視領域(104及び106)内の他の移動車両の存在に対して自動車の運転者に警報を発するための放射源としてレーザーダイオードを利用している。この物体検出システム(200)は光送信器(204)及び光受信機(212)を含んでいる。  (もっと読む)
(もっと読む)
移動再帰反射器を測定する絶対距離計
増分干渉計を使用することなく、移動外部再帰反射器またはそのほかの移動目標表面の1またはそれを超える次元の絶対距離測定および/または表面走査および/または座標測定が可能なレーザ・デバイスおよび方法。  (もっと読む)
(もっと読む)
点滅灯内において一体にまとめられた、光学的な、側方の周辺センサーを有する自動車
【課題】 本発明は、車両の側方の周辺内における対象物を検出するための、少なくとも1つのセンサーを有する自動車であって、その際、
このセンサーが、電磁的な放射線を発信するための少なくとも1つの発信部、並びに、対象物に反射された電磁的な放射線を受信するための1つの受信部を有している様式の上記自動車に関する。
【解決手段】 本発明により、発信部15および受信部20は、側方点滅灯10内において設けられており、この側方点滅灯が、自動車の側壁に装着されており、その際、この発信部15および受信部20が、この側方点滅灯10のカバー50によって覆われている。 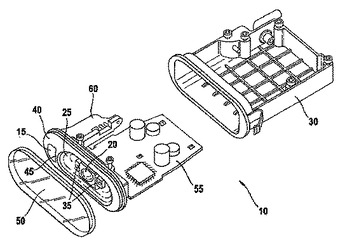 (もっと読む)
(もっと読む)
電子機器
【課題】
照度を適度に変更すると共に、消費エネルギーの消耗を防止することができる電子機器を提供する。
【解決手段】
車載用の電子機器本体2に設けられて被照明対象を照明するために発光制御される照明手段(LCD表示画面、操作ボタン)3、4を備えた電子機器1であって、電子機器本体2から外方に向って検出信号(赤外線)Sを出力する検出信号出力部(赤外LED)5と、対象物(使用者の手)Hにより反射された検出信号Sを検出する検出信号検出部(赤外線選出センサ)6と、この検出信号検出部6の出力に応じて対象物Hと電子機器本体2との距離を演算する距離演算手段(距離演算部)11と、この距離演算手段11の演算結果に応じて照明手段3、4の照度を変更する照度変更手段(照度変更部)12とを備えた。
(もっと読む)
器具の位置の非接触型決定を実行する方法及びシステム
本発明の実施形態は器具(410、540、630、720)の位置を非接触的に決定する方法或いは決定するシステムに関する。一実施形態においては、非接触型測定システムが移動機械に連結された器具の位置を決定する。移動機械の地理的位置を測定し(320)、器具(330)の地理的位置が、移動機械(330)の地理的位置及び器具の移動機械(310)に対する位置に基づいて決定する。  (もっと読む)
(もっと読む)
物品の発見を手助けするための機器
レーザーダイオード(4)を備えた励起光線(5)を放射するための手段を含む筐体(3)を備える、物品を見出す手助けをするための機器である。本機器はまた、ゴルフボール(2)から、該ボール(2)の蛍光塗料によって送り返される返却光線(8)を受光するための、受光レンズ(9)の形態の手段、およびレシーバ(10)であるレシーバも持っている。装置(1)はまた、返却光線(8)から入射日光をろ過するための2つのフィルタ(11、12)の形態の返却光線ろ過手段も備えている。装置はまた、フィルタ(11、12)を通過し、最終的には、ゴルフボール(2)が装置(1)によって検知されたことを表示するための電子ブザーおよび点滅灯の形態の表示手段(18)へも通過する信号を処理するための処理手段(15)も備えている。 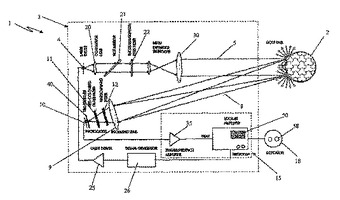 (もっと読む)
(もっと読む)
車外監視装置、及び、この車外監視装置を備えた走行制御装置
【課題】誤認識を排除し、撮像手段とレーダ手段から取得できる可能な限りの多くの情報を用いて精度の良い制御を可能とする。
【解決手段】フュージョン立体物確認部18は、フュージョン立体物設定部17から入力される画像立体物単体のフュージョン立体物、ミリ波立体物単体のフュージョン立体物、画像立体物とミリ波立体物との組み合わせによるフュージョン立体物の全ての立体物に判定を行い、画像情報を基に予め定めておいた横方向の応答性遅れによるゴースト判定、壁反射によるマルチパスによるゴースト判定、及び、先行車からの反射波によるゴースト判定の条件を満たすミリ波立体物単体のフュージョン立体物を虚像であると判断する。この虚像との判定結果は設定時間維持される。こうして虚像と判断された立体物は、その後の制御対象からは除かれる。
(もっと読む)
161 - 180 / 184
[ Back to top ]