
Fターム[5J084BB28]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学要素 (2,698) | ミラー (802) | 可動ミラー (317)
Fターム[5J084BB28]に分類される特許
201 - 220 / 317
投影装置及び投影制御方法
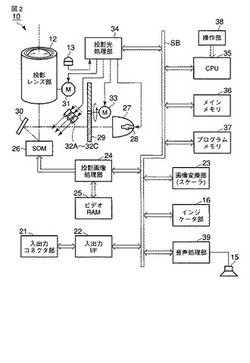
【課題】装置の小型化に寄与し、より簡易な構成で高い精度の測距を実行可能とする。
【解決手段】光源ランプ28と、多数の微小ミラーの光源ランプ28からの光に対する各傾斜角度を制御して反射光により光像を形成するミラー素子26を駆動し、光像を投影レンズ部12を介して投影する投影系24〜34と、光源ランプ28とは別に設けられ、微小ミラーが光源ランプ28からの光を投影レンズ部12の外部に反射させる傾斜角度の状態で微小ミラーへ変調光を入射させ、その反射光が投影レンズ部12を介して出射するように配置したレーザ発光部32A〜32Cと、レーザ発光部32A〜32Cの発光で投影対象から得られる反射光を受信するレーザ受光部13と、レーザ発光部32A〜32Cの発光とレーザ受光部13の受光の位相差により投影対象までの距離を測定し、測定した距離により投影系24〜34での投影条件を制御するCPU35、メインメモリ36及びプログラムメモリ37とを備える。
(もっと読む)
対物距離計測装置
本発明に係る装置は計測対象物(20)までの距離(d)を計測する装置であり、出射ビーム光(18)を発生させる発光器(12)、計測対象物(20)による出射ビーム光(18)の反射で生じる入射ビーム光(24)を受け取る受光器(14)、並びにそれらのビーム光(18,24)の伝搬時間に基づき距離(d)を求める評価ユニット(16)を備える。受光器(14)は、第1レンズ素子(60)及びピンホールダイアフラム(64)を有する受光ユニット(58)を備える。入射ビーム光(24)が光輪(102)状になってピンホールダイアフラム(64)に達するよう、非透光性の部材(12)で受光ユニット(58)の中央部に影を作る。第1レンズ素子(60)とピンホールダイアフラム(64)の間に、略鍔付帽子状断面の第2レンズ素子(62)を配置する。  (もっと読む)
(もっと読む)
対物距離計測方法及び装置
本発明に係る方法は、計測対象物(20)までの距離(d)を計測する方法であり、発光器(12)からビーム光(18)を出射するステップと、計測対象物(20)で反射されたビーム光(24)を受光器(14)に入射するステップと、その出射(18)から入射(24)までのビーム光伝搬時間から距離(d)を求めるステップと、ビーム光(18)の出射に際し方形波変調信号(66,74)に従いそのビーム光(18)を振幅変調するステップと、を有する。使用する方形波変調信号(66,74)は、それぞれ複数個の方形パルス(68,68’)からなる複数個の方形パルス群(76,76’)を含む信号(66,74)である特に、本方法では、それら方形パルス群(76,76’)間の時間間隔(PA)を変動させると共に、それらの方形パルス群(76,76’)内の方形パルス(68,68’)の個数を変動させる。  (もっと読む)
(もっと読む)
自己混合干渉に基づくレーザセンサシステム
ターゲットまでの距離及び/又はターゲット50の速度を測定するためのセンサモジュール1は、少なくとも1つのレーザ供給源100と、変調されたレーザ光を検出する少なくとも1つの検出器200と、少なくとも1つの制御要素とを有し、制御要素400は、レーザ光の焦点、レーザ光の強度、及び/又は、レーザ光の方向を変化させる。レーザ供給源100及び検出器200のアレイと組み合わせて、可変フォーカスレンズ若しくは制御可能な減衰器のような能動光学デバイス、又は、受動光学要素のいずれかにより、レーザ供給源100により放射されたレーザ光の制御は、フレキシブルで堅調なセンサモジュールを可能にする。  (もっと読む)
(もっと読む)
3次元形状測定器

【課題】レーザ光の照射位置における戻り光の正確な光量による計測が可能な形状測定装置を有する3次元形状測定器を提供すること。
【解決手段】レーザダイオード2と、第1光学系と、照射位置移動手段と、エンコーダ6aと、第2光学系と、CCDラインセンサ部13と、入射光量測定手段とを有し、検知手段から出力された検知信号により所定時間の間隔を有する複数のタイミング信号が生成され、タイミング信号によってCCDのリセットタイミングが制御されており、一のタイミング信号後に確認用レーザ光をレーザダイオード2から照射し、確認用レーザ光の光量を入射光量測定手段により測定し、入射光量測定手段により測定された確認用レーザ光の光量から測定用レーザ光の発光量が決定される。
(もっと読む)
レーザレーダ装置および輸送機器
【課題】処理すべきデータの量を増大させることなく対象物までの距離を高精度で測定することが可能なレーザレーダ装置およびそれを備えた輸送機器を提供することである。
【解決手段】シリアルパラレル変換器140は、サンプルデータSMをnビットのパラレルデータPDに順次変換する。カウンタ回路150は、基本クロック信号CKの周期のn倍の周期を有するパラレルクロック信号PCKに基づいて、連続する0ブロックの数をカウントし、カウント結果を示すカウンタ出力信号CUを生成する。処理部180は、発射光の受光時におけるパラレルデータPD、反射光の受光時におけるパラレルデータPDおよび発射光の受光時と反射光の受光時との間での0ブロックの数を記憶部160に記憶し、記憶部160に記憶されたパラレルデータPDおよびカウンタ出力信号CUに基づいて距離を算出し、算出結果を距離信号DSとして出力する。
(もっと読む)
物体検出装置
【課題】特定の範囲に存在している物体の位置検出精度を向上させる。
【解決手段】検出対象の物体が比較的遠距離に存在している車両の前方領域と、検出対象の物体が比較的近距離に存在している車両の側方領域を含む物体検出範囲内で、長手方向を鉛直方向に略一致させたスリットのレーザ光を走査させ、物体で反射されたレーザ光を、受光面20Aのうち、前方領域からのレーザ光の受光範囲におけるレーザ光移動方向に直交する方向に沿った受光素子24の配列のピッチが、側方領域からのレーザ光の受光範囲におけるレーザ光移動方向に直交する方向に沿った受光素子24の配列のピッチよりも小さくされた受光器で受光し、レーザ光を反射した物体の鉛直方向位置を検出することで、比較的遠距離に位置し前方領域内に存在している物体の鉛直方向位置の検出精度を向上させる。
(もっと読む)
物体検知装置
【課題】 小型化が可能であり、安価で安全な光源を使用して高精度の検知を実現できる物体検知装置を提供する。
【解決手段】 物体検知装置1は、光を被検知領域に照射する発光素子2と、被検知領域にある被検知物から反射された反射光を受光する第1の受光素子5aと、被検知領域からの反射光と異なる波長の光を受光する第2の受光素子5bと、該反射光及びこれと波長が異なる光を第1、第2の受光素子5a、5bが受光する方向に偏向させる光反射部3と、該光反射部3を所定の角度範囲で回転させる回転駆動手段4と、第1、第2の受光素子に受光された光の、光反射部3の回転角度に対する強度分布から、被検知物の存在とその方向を検知する検知手段6とを備える。
(もっと読む)
レーザレーダ装置
【課題】装置の周囲にわたる検出が可能であり、かつ3次元的な検出をも行いうるレーザレーダ装置を提供する。
【解決手段】レーザレーダ装置1は、レーザダイオード10と、フォトダイオード20と、回転反射機構40とを備えた構成をなしている。回転反射機構40のミラーユニット43には、複数のミラー44〜48が設けられており、このうちのいずれかのミラーにより、レーザ光L1を空間に向けて反射し、且つ反射光を光検出手段に向けて反射する構成をなしている。また、ミラーユニット43は、中心軸42aに対して各ミラー44〜48の傾斜角度がそれぞれ異なるように構成されており、レーザ光L1の入射位置に配置されるミラーを切り替えることで、ミラーユニット43からのレーザ光の向きを中心軸42aの方向に関して変化させる構成をなしている。
(もっと読む)
ビーム照射装置
【課題】目標領域内におけるスキャン動作を精度よく行い得るビーム照射装置を提供する。
【解決手段】制御処理部202は、ミラーアアクチュエータ100を第1基準位置と第2基準位置の近傍域で2次元的に駆動させ、これら基準位置を検出した時のPSD106の出力値(座標データ)を記憶する。温度変化や経年変化等の影響でPSDの状態が初期状態から変化すると、図8(b)に示す如く、記憶された座標データ(第1基準点R1´、第2基準点R2´)は、初期状態において設定した座標データ(第1基準点R1、第2基準点R2)からずれるようになる。制御処理部202は、これら2つの基準点におけるズレ量ΔP1、ΔP2とズレ量ΔQ1、ΔQ2に基づいて目標値テーブル202aのデータ校正を行い、校正した目標値テーブルを用いてサーボ動作を行う。
(もっと読む)
レーザレーダ装置
【課題】分光効率が良く、検出性能に優れたレーザレーダ装置を提供する。
【解決手段】レーザレーダ装置1は、レーザ光L0の経路上にミラー30が設けられており、このミラー30は、レーザ光L0の光軸に対し所定角度で傾斜してなる反射面31と、この反射面31と交差する方向の貫通路32と、を備え、貫通路32を介してレーザ光を通過させる一方、反射面31により検出物体からの反射光L3をフォトダイオード20に向けて反射する構成をなしている。また、貫通路32を通過したレーザ光L1の経路上には、平面反射部44と凹面反射部43とが中心軸42aを中心として一体的に回動する回動偏向機構40が設けられており、貫通路32を通過したレーザ光L1を平面反射部44によって空間に向けて反射し、且つ検出物体からの反射光L3を少なくとも凹面反射部43によりミラー30に向けて反射する構成をなしている。
(もっと読む)
移動体の障害物位置認識方法及び移動体
【課題】小型で低コストの一次元レーザスキャナを用いて、移動体の移動方向とは異なる二次元方向に測定光を走査させ、障害物を位置認識できるようにすること。
【解決手段】移動面A上を移動する移動ロボット1の本体3と移動用走行輪5とを接続する走行輪アーム7のアーム部71,73を、ロータリアクチュエータ75の回転により適宜個別に屈伸させ、本体3をチルト方向に揺動させて、移動面A上の障害物を認識するため外界センサ13が出力する、移動ロボット1の左右方向に走査される測定光を、上下方向にも走査させる。本体3をチルト方向下方に揺動させ外界センサ13で受光した移動面Aからの反射光から割り出した、移動面Aの座標値群のローカル座標系における鉛直座標軸の方向と、加速度センサ153の出力から割り出した重力方向とのずれ角で、ローカル座標系からグローバル座標系への座標値変換用のキャリブレーションデータを得る。
(もっと読む)
対象検出装置、対象検出方法、および対象検出プログラム
【課題】レーザセンサを用いた対象検出技術において、広い検出範囲を維持したまま、誤検出を減らす。
【解決手段】対象検出方法は、レーザ投受光部の取付位置から斜め下方にレーザビームを発射することで対象を検出するための方法であって、レーザ投受光部から被検出物までの距離情報を取得する距離情報取ステップと、被検出物がレーザ投受光部側に接近してくる際に被検出物の追跡が途切れたか否かを判定可能である追跡消滅判定ステップと、被検出物の追跡が途切れた場合に、被検出物の追跡が途切れる直前の距離情報に基づいて、被検出物が対象であるか又は非対象であるかを判定する対象判定ステップとを備えている。
(もっと読む)
レーザレーダ装置
【課題】装置の周囲にわたる検出が可能であり、かつ3次元的な検出をも行いうるレーザレーダ装置を提供する。
【解決手段】レーザレーダ装置1は、複数のミラー81a〜81lを備えたミラーユニット80が設けられ、偏向部41によって偏向されたレーザ光L1を、これら複数のミラー81a〜81lのいずれかによって更に偏向させる構成をなしている。さらに、ミラーユニット80を変化させることでレーザ光L1の入射位置に配置されるミラーを切り替える構成をなし、このようにレーザ光の偏向方向を変化させることで、空間に向かうレーザ光の向きを、中心軸42aの方向(縦方向)に関して変化させている。
(もっと読む)
レーザレーダ装置
【課題】装置の周囲にわたる検出が可能であり、かつ3次元的な検出をも行いうるレーザレーダ装置を提供する。
【解決手段】レーザレーダ装置1は、レーザダイオード10と、フォトダイオード20と、中心軸42aを中心として回動可能に構成された偏向部41を有する回動偏向機構40と、回動偏向機構40を回転駆動する第1モータ50と、を有してなり、回動偏向機構40の偏向部41は、レーザ光を空間に向けて偏向させ、且つ反射光を光検出手段に向けて偏向する機能を有している。さらに、レーザダイオード10からのレーザ光の一部を導出可能に構成され、かつその導出方向を変更可能な導出装置80を備えており、この導出装置80がレーザ光の導出方向を変化させることにより、偏向部41へのレーザ光の入射方向が変化し、偏向部41からのレーザ光の向きが中心軸42aの方向に関して変化する構成となっている。
(もっと読む)
距離計測装置、距離計測方法および車両
【課題】背景光の周波数が変化しても、被検物までの距離を正確に計測できる距離計測装置を提供する。
【解決手段】所定周波数で変調された光を照射する投光装置1と、照射された光の反射光を撮像する撮像装置2と、撮像装置2で得られた撮像信号の同期検波を行う同期検波処理部32と、同期検波によって得られた信号に基づいて被検物までの距離情報を求める距離算出部33と、撮像装置2で得られる撮像信号に基づいて、この撮像信号に含まれる周波数成分と識別可能な照射光の周波数を求める照射周波数算出部34と、その照射光の周波数によって投光装置1の所定周波数を変更する駆動制御部31とを備える。
(もっと読む)
車載用レーダ装置
【課題】レーザレーダがその前方に放射するレーザ光を、安価で損失の少ない構成により前方と左、右の三方に振り分け、前方と左、右の三方の探査が行なえるようにする。
【解決手段】車両に搭載されたレーザレーダ12がその前方の一定角度の範囲に放射するレーザ光の一部、すなわち、左、右端部のレーザ光を、前方に放射される残りのレーザ光の損失を生じることなく、反射鏡13a、13bにより外向きに反射して左、右方向の探査に振り分け、レーザレーダから前方に放射されるレーザ光により、安価な構成で、レーザ光の損失を生じることもなく、前方と左、右の三方の探査を行なう。
(もっと読む)
光検出装置、光検出方法および車両
【課題】背景光の光量レベルが高い環境または被検物からの光が弱い環境下でも、被検物からの光を高精度に検出する。
【解決手段】所定周波数で点灯消灯するパルス光を被検物に照射し、パルス光が照射される被検物を含む領域を撮像する。所定周波数の1以上の整数倍の複数の周波数の信号を含む複数の参照信号を生成し、生成された複数の参照信号を用いて、撮像信号を同期検波する。同期検波された複数の検波信号を加算し、加算した同期検波信号に基づいて、ノイズ成分を除去した計測信号を出力する。
(もっと読む)
ビーム照射装置
【課題】ミラー回動位置の検出を、簡易な演算処理によっても適正に行い得るビーム照射装置を提供する。
【解決手段】ミラー113に入射する際のレーザ光の光軸からミラー113の入射面を臨む角度方向A1と、透明体200に入射する際のサーボ光の光軸から透明体200の入射面を臨む角度方向A2とが互いに相反するように、レーザ光とサーボ光がミラー113と透明体200に入射される。これにより、サーボ光の走査軌跡が平行化される。サーボ光の走査軌跡をさらに平行化するには、ミラー113(透明体200)が中立位置にあるときに、透明体200の入射面に対して光軸が45度以下の傾きを有するようにして、サーボ光を透明体200に入射させるのが好ましい。
(もっと読む)
レーザレーダ装置
【課題】装置の周囲にわたる検出が可能であり、かつ3次元的な検出をも行いうるレーザレーダ装置を提供する。
【解決手段】レーザレーダ装置1は、レーザ光を発生するレーザダイオード10と、レーザダイオード10からレーザ光が発生したときに、検出物体によって反射されるレーザ光の反射光を検出するフォトダイオード20とを備え、さらに、所定の中心軸42aを中心として回動可能に構成された偏向部41を備えるとともに、偏向部41によりレーザ光を空間に向けて偏向させ、且つ反射光をフォトダイオード20に向けて偏向する回動偏向機構40と、回動偏向機構40を回転駆動するモータ50とが設けられている。そして、偏向部41に対するレーザ光の入射方向を相対的に変化させることで、偏向部41からのレーザ光の向きを、中心軸42aの方向に関して変化させる揺動ミラー31と、この揺動ミラー31を制御する制御手段とが設けられている。
(もっと読む)
201 - 220 / 317
[ Back to top ]