
Fターム[5J084BB28]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学要素 (2,698) | ミラー (802) | 可動ミラー (317)
Fターム[5J084BB28]に分類される特許
121 - 140 / 317
フォームファクタが小さいサイズセンサ
本明細書で開示される主題は、モバイル機器から遠隔の物体までの距離を測定すること、または遠隔の物体のサイズを測定することに関する。 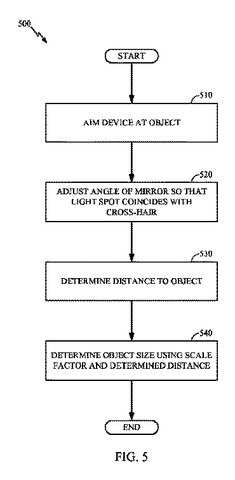 (もっと読む)
(もっと読む)
光測距装置
【課題】要求に応じて動作状態を変更することのできる光測距装置を提供する。
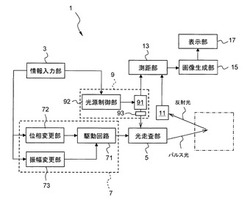
【解決手段】光測距装置1は、光反射面を有する可動部が揺動することで光反射面に入射される光を対象領域内でリサージュ走査できる光走査部5、可動部を第1方向、第2方向に揺動させる第1駆動信号、第2駆動信号を光走査部5に供給して可動部を揺動駆動する駆動部7、光反射面に向かってパルス光を出射する光源部9、パルス光の反射光を受光する受光部11及びパルス光の出射タイミングと反射光の受光タイミングとに基づいてパルス光を反射した物体までの距離を計測する測距部13を備える。駆動部7は、第1駆動信号と第2駆動信号との位相差を変更する位相差変更部72、及び、第1駆動信号及び第2駆動信号を大きさ調整して可動部の揺動振幅を変更する振幅変更部73の少なくとも一方を含む。
(もっと読む)
ビーム照射装置

【課題】シリンドリカルレンズ等のビーム整形用レンズを用いることなく、所望の形状のビームを目標領域に照射可能なビーム照射装置を提供する。
【解決手段】 レーザ光を出射するレーザ光源410と、レーザ光源410から出射されたレーザ光が入射される収束レンズ430と、収束レンズ430を透過したレーザ光を目標領域において走査させるためのミラーアクチュエータ100を備える。レーザ光源100は、レーザチップのpn接合面が鉛直方向に平行となるように配される。レーザ光源100の発光部の鉛直方向に平行な方向の長さによって、目標領域における前記レーザ光の鉛直方向の長さが設定される。
(もっと読む)
ビーム照射装置およびレーザレーダ
【課題】シリンドリカルレンズ等のビーム整形用レンズを用いることなく、安定したビームプロファイルにて、ビームを目標領域に照射可能なビーム照射装置を提供する。
【解決手段】レーザ光を出射するレーザ光源410と、レーザ光源410から出射されたレーザ光が入射される収束レンズ430と、収束レンズ430を透過したレーザ光を目標領域において走査させるためのミラーアクチュエータ100を備える。レーザ光源410は、レーザチップのpn接合面が鉛直方向に平行となるように配される。レーザ光源410の発光部の鉛直方向に平行な方向の長さによって、目標領域におけるレーザ光の鉛直方向の長さが設定される。また、レーザ光に対する収束レンズ430の波面収差が0.15λrms以下に設定されている。
(もっと読む)
環境を光学的に走査および測定する方法
レーザスキャナ10の環境を光学的に走査および測定する方法であって、レーザスキャナ10が、発光器17および受光器21をもつ測定ヘッド12と、測定ヘッド12に対して第1の軸Aの周りを回転可能な鏡16と、測定ヘッド12がそれに対して第2の軸Bの周りを回転可能な基部14と、制御および評価ユニット22と、走査に対して、レーザスキャナ10の静止基準系およびこの走査の中心を画定する中心C10とを備え、発光器17が発光ビーム18を放射し、鏡16が、発光ビーム18を環境内へ反射し、また測定ヘッド12の回転中にいくつかの完全な回転を行い、受光器21が、鏡16を介して受光ビームを受け取り、受光ビームが、レーザスキャナ10の環境内で物体Oによって反射され、または他の形で散乱され、制御および評価ユニット22が、走査の多数の測定点Xに対して、少なくとも中心C10と物体Oの距離dを判定し、測定ヘッド12が、走査に対して半分より大きな回転を行い、少なくともいくつかの測定点Xが2重に判定される方法が提供される。 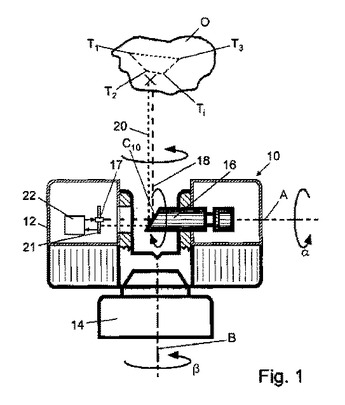 (もっと読む)
(もっと読む)
レーザ照射装置
【課題】背面側に照射されるレーザ光を正確かつ高精度に正面側へ照射するとともに、背面側に照射されるレーザ光のすべてを正面側へ照射可能であり、かつ構造が簡単で組み付け精度の高いレーザ照射装置を提供する。
【解決手段】同一形状の第一ユニット部材31と第二ユニット部材32とは一方を反転させて重ねることにより、一体のレーザ照射方向反転ユニット13を構成する。レーザ照射部14のレーザ光は、回転ミラー16の反射面19で反射して正面および背面へ展開される。背面へ展開されたレーザ光は、反射ミラー33および反射ミラー34で正面側へ折り返されて外部へ照射される。同一形状の第一ユニット部材31の突出部と第二ユニット部材32の突出部との間の隙間にステー部材50の接続部が挿入される。これにより、回転ミラー16を含むレーザ照射ユニット12とレーザ照射方向反転ユニット13とは高い精度で組み付けられる。
(もっと読む)
目標物体を検出するためのドア感知システム
【課題】外部での適用例などに応用する際の使用に適した光スキャナ装置を提供すること、また、長い使用期間にわたって適切な動作が確保される光スキャナ装置を提供することにある。
【解決手段】目標物体(56)の距離範囲及び角方向を計測するための光スキャナ装置(10)であって、光パルスを送信するようになされたパルス源(12)と、この送信光パルスを反射し且つ可変掃引方向に掃引面(15)内部の掃引区域を横切って掃引するようになされた送信偏向手段(20)と、掃引面(15)内で反射された受信光パルスを検出するようになされた光検出手段(42)と、掃引面(15)内で反射された光パルスを反射し且つ反射された光パルスを光検出手段(42)に再誘導するようになされた受信偏向手段(24)と、光遮断手段(32)を備える。
(もっと読む)
光測距装置
【課題】霧などの外乱の中に測定対象物が存在する場合であっても、この測定対象物を見落としなく検出できる光測距装置を提供する。
【解決手段】受光素子の検出信号のレベルが閾値に到達した時点を受光タイミングとして検出する立上がり回路と、受光素子の検出信号をフィルタリングした後の信号のゼロクロス点を受光タイミングとして検出する共振回路とを備え、前記立上がり回路の閾値を、霧などの外乱からの反射光について受光タイミングを検出しないように設定する。そして、両回路が同じ受光タイミングを検出した場合には、光量に基づいてより高い精度を示す回路を選択して距離データを出力させる。また、共振回路による受光タイミングの検出の後で、立上がり回路が受光タイミングを検出した場合は、立上がり回路で検出された受光タイミングを選択して、距離データを出力させる。
(もっと読む)
光測距装置
【課題】光を透過させる投受光窓を介して、測定対象物に向けた投光及び測定対象物からの反射光の受光を行って、前記測定対象物までの距離を測定する光測距装置において、前記投受光窓の汚れを、簡易な構成で高精度に検知できるようにする。
【解決手段】距離値算出部101での測距結果、及び、受光光量レベルを入力する汚れ検知部107において、投受光窓6までの距離に相当する測距値を得た場合に、当該測点に対応する投受光窓6の領域に汚れが付着していると判断し、かつ、当該測定における受光光量レベルから汚れの濃度を検出する。そして、前記汚れの付着が判断された測点と該測点での汚れ濃度とから汚れレベルを判断し、汚れレベルに基づいて、警告装置108、投受光窓上の汚れを除去する除去装置109を動作させ、また、測点位置・投光強度・受光感度の変更などの測距動作の補正を行う。
(もっと読む)
ミラーアクチュエータおよびビーム照射装置
【課題】回動軸における摩擦や不要な制動力を抑制でき、ミラーの回動性能を高めることができるミラーアクチュエータおよびこのミラーアクチュエータを搭載したビーム照射装置を提供する。
【解決手段】ミラーアクチュエータ100は、マグネットユニット130と、マグネットユニット130に固定された支軸111と、支軸111に回動可能に軸支されたチルトユニット110と、チルトユニット110に固定され支軸111に垂直な支軸125と、支軸125に回動可能に軸支されたパンユニット120と、パンユニット120に装着されたミラー140とを備える。チルトユニット110とパンユニット120は、それぞれ、支軸111と支軸125を1ヵ所で軸受けする軸受部112と軸受部122を有する。
(もっと読む)
追跡方法、および、レーザートラッカを有する測定システム
反射器(17)が設けられた標的(9)が、レーザートラッカ(10)を含む測定システムにおいて追跡される。反射器(17)は、通常追跡モードにおいて追跡ユニット(11)により追跡され、特別追跡モードにおいて概観装置(13)により追跡される。追跡ユニット(11)の検出領域と概観装置(13)の検出領域との間にある検出領域を有する捕捉ユニット(12)も存在する。標的(9)を追跡ユニット(11)によっては検出できないが、捕捉ユニット(12)により検出可能である場合、追跡ユニット(11)の方向は、捕捉ユニット(12)による測定に従って制御される。そして、標的(9)を追跡ユニット(11)によっては検出可能である場合、通常追跡モードへの遷移が開始される。標的(9)を概観装置(13)のみにより検出可能である場合、追跡ユニット(11)の方向は、概観装置(13)の測定に従って制御される。  (もっと読む)
(もっと読む)
画像撮像装置
【課題】レーザレーダの測距精度の向上、レーザ光路上に複数の目標が有る場合への対応、および霧・雨等の影響を除去したデータ(画像)の取得。
【解決手段】レーザ照射後、光路上の全ての反射レーザ光の信号レベルをA/D変換器により時系列に取得する。A/D変換した信号からソフトウエアによる移動平均、ピーク検出処理により受光信号のピークレベルを正確に検知し、精度の高い測距データを得る。また、A/D変換データ上にある複数のピークを検出することにより、複数目標の距離を測定可能となる。更に、A/D変換データ上の所定の閾値以上の反射信号強度のみを抽出、表示することにより、霧・雨や背景のデータを削除した画像を表示する。
(もっと読む)
走行車
【課題】前方の走行車を検出可能なスキャンセンサを備えた走行車において、スキャンセンサの誤検出を減らす。
【解決手段】走行車3は、走行車本体と、スキャンセンサ4と、フィルタ7とを備えている。スキャンセンサ4は、前方の走行車3を検出可能なセンサであり、測定範囲の一部の特定の光線が斜めに投射されるように水平面より傾けて配置されている。フィルタ7は、光量を減衰させるためのものであり、特定の光線に対して平面視で直交する方向に配置されている。
(もっと読む)
レーザ測距装置及びレーザ測距方法
【課題】ポインティングリファレンスを簡単な構成で走査範囲内に設置する。
【解決手段】レーザビームを第1及び第2のミラーで2次元に走査するレーザ測距装置において、前記レーザビームの送信側の前記第2のミラーは前記レーザビームを部分的に透過するミラーであり、前記第2のミラーを透過したリファレンス用レーザビームを当該第2のミラーに反射する第3のミラーと、前記第3のミラーで反射され、前記第2のミラーの裏面で反射された前記リファレンス用レーザビームを集光する集光光学系と、前記集光光学系で集光された前記リファレンス用レーザビームを検出する2次元アレイ状の検出器と、を更に備え、前記第1のミラー及び前記第2のミラーの角度情報と前記検出器の検出信号とに基づいて規定値からの変位量を計算し、前記変位量に基づいて前記第1のミラー及び前記第2のミラーの角度を校正する。
(もっと読む)
飛行機の識別及びドッキング誘導装置
【課題】飛行機のドッキング中の事故を防止し得るように飛行機の検出を改良すること。
【解決手段】ゲートに近づきつつある飛行機(12)を特定するために、レーザー距離計(LRF)(20)が使用される。LRF(20)は飛行機(12)に向けられており、エコーから輪郭を得て、公知の輪郭と比較される。類似した輪郭を有する飛行機(12)から区別するために、LRFは、エンジンのような構造があると予想される容積及びエンジンがないと予想される別の容積に向けられる。これらの2つの容積からのエコーは、エンジンが予期した場所にあるか否かを決定するために使用される。エンジンがある場合には、飛行機(12)は正しい機種のものであるとして特定され且つゲート(16)に入ることを許容される。そうでない場合には、飛行機(12)は止められる。機首の高さは、更に別の特定のための判定基準として使用することができる。
(もっと読む)
ライダーとビデオ測定を使用する3次元画像の生成システム及び方法
システムはターゲットの6つの自由度の軌跡を評価するため、ライダーシステムからの距離及びドップラ速度測定と、ビデオシステムからの画像とを使用する。システムはこの軌跡を2つの段、即ちビデオシステムからの画像から得られた種々の特性測定と共にライダーシステムからの距離及びドップラ測定が前記ターゲットの第1の段の運動特徴(即ちターゲットの軌跡)を評価するために使用される第1の段と、ビデオシステムからの画像とターゲットの第1の段の運動特徴がターゲットの第2の段の運動特徴を評価するために使用される第2の段で、この軌跡を評価する。ターゲットの第2の段の運動特徴が評価されると、ターゲットの3次元画像が生成されることができる。 (もっと読む)
目標検出装置及び目標検出方法
【課題】低熱源目標を容易にかつ確実に検出可能な目標検出装置を提供する。
【解決手段】赤外線カメラ12の視野内に、光学装置11から赤外線レーザビームを放射してカメラ視野範囲を走査していき、低熱源目標Tに当たって反射する赤外線レーザビームの反射光を赤外線カメラ12に入射して目標情報検出器14により低熱源目標Tを検出するようにしている。
(もっと読む)
レーザ画像計測装置
【課題】小型で低コスト、かつ高い解像度で高速に対象物の3次、2次元画像を計測できるレーザ画像計測装置を得る。
【解決手段】CW変調信号を発生する発振器1と、レーザ光を発生するレーザ装置2と、変調信号に基づきレーザ光に強度変調をかける変調器3と、レーザ光を走査して照射し、走査角度を発生するレーザ光走査光学系4と、対象物からの反射光を集光する受信光学系5と、レーザ走査範囲における対象物の多点の反射光を受信することができる口径を持ち、反射光を電気信号に変換する受光器6と、前記変調信号の位相と受光器6で得られた反射光の電気信号の位相との位相差を検知する位相検波装置7と、この位相検波装置7によって得られた位相差から前記対象物までの距離を演算する距離演算装置8と、前記走査角度及び距離から2次、3次元画像を生成する画像処理装置9とを設けた。
(もっと読む)
測距方法及び車載測距装置
【課題】床面に近い位置に置かれた障害物を精度良く検知できる測距方法を提供する。
【解決手段】発光部から出力された測定光を所定周期で繰り返し走査して対象物からの反射光を受光部に導き、測定光と反射光の検出時間差に基づいて対象物までの距離を算出する測距装置を車両に取り付けて、走査面が測定対象平面と交差するように測定光を走査して、測定対象平面または対象物までの距離を算出し、所定の走査角度で算出された距離に基づいて測定対象平面に平行な仮想平面を生成し、各距離を仮想平面からの鉛直距離に換算し、換算した鉛直距離と当該鉛直距離に対応する測定対象平面上の測定光の走査位置との相関を表す近似線を算出し、換算した鉛直距離が当該近似線から求まる鉛直距離より所定の閾値以上短い値を示す走査位置に対象物が存在すると検知する各ステップを所定の走査周期毎に繰り返す。
(もっと読む)
走査型測距装置
【課題】走査効率の高い走査型測距装置を提供する。
【解決手段】投受光部1aから投光された測定光は鏡面2aによって反射され、筐体の透過部6を通過し、測定対象空間に照射される。測定対象空間に測定対象物があると、測定対象物からの反射光は、透過部6を再度通過し、鏡面2aによって反射され、投受光部1aにて受光されることで測定対象物の位置を測定する。また、同時に他方の投受光部1b、鏡面2bでも同様に他の測定対象物の位置を測定することにより測定効率を向上することができる。
(もっと読む)
121 - 140 / 317
[ Back to top ]