
Fターム[5J084BB28]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学要素 (2,698) | ミラー (802) | 可動ミラー (317)
Fターム[5J084BB28]に分類される特許
301 - 317 / 317
光伝送システムおよび光伝送方法
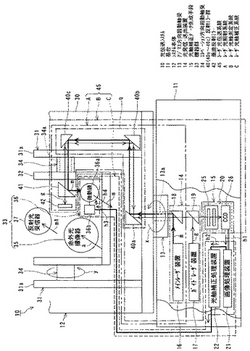
【課題】ターゲットに対して照射するレーザ光の照射精度を向上させると共に、光伝送システム全体の小型軽量化を図る。
【解決手段】光伝送システム10は、航空機等の飛翔体に設置される基台11と、この基台11上にアジマス方向に回動自在に支持されるシステム本体12とから構成される。 基台11は、アジマス方向回動軸受13と、光発生・送出装置14と、光軸補正データ生成手段15とを備える。 アジマス方向回動軸受13には、メインレーザ光mおよびガイドレーザ光gを導光する軸孔13aが設けられる。 光発生・送出装置14は、メインレーザmを生成する。 光軸補正データ生成手段15は、光検出器20と画像処理装置21と、光軸補正処理装置22とを備えている。
(もっと読む)
距離測定装置および距離測定方法

【課題】 対象物までの距離を高い精度で迅速に測定する。
【解決手段】 超短パルスファイバレーザ22からのパルス光を光分岐器24により参照光Aと信号光とに分岐し、信号光についてはスキャニングミラー装置28により対象物10に照射してその反光である散乱光を受光し、参照光Aについては光路長調整部30により光路長を変更する。そして、光路長が変更された参照光Aと散乱光Bとの干渉の程度を干渉信号として差動検出器40により検出し、干渉信号が最大となる光路長に対応する光路長調整部30の調整値からスキャニングミラー装置28から対象物10までの距離を演算することにより、対象物10のパルス光が照射された位置のまでの距離を測定する。
(もっと読む)
風速・風向測定システム
【課題】 測定範囲内における風速・風向を、効率よく、容易かつ簡単に測定することができる風速・風向測定システムを提供すること。
【解決手段】 レーザ光を測定箇所に出射する出射部と、その測定箇所で散乱された戻レーザ光を受光する受光部と、この出射部と受光部を駆動制御する制御部30と、を備えて、その制御部のCPU31は、測定箇所を細かく変動させて近傍3箇所における風速測定を行うことにより、その測定箇所における風速・風向を測定するとともに、その測定箇所を3次元的に変化させる。
(もっと読む)
風速測定システムおよび風速測定方法
【課題】 ドップラーシフトにより変化したレーザ光の周波数を簡易に導くことを実現して、測定箇所における風速や風向を容易かつ簡単に測定可能な風速測定システムを提供すること。
【解決手段】 出射レーザ光L1を出射するレーザ光生成器11と、出射レーザ光L1の戻レーザ光L2を分光するハーフミラー24と、ハーフミラーを透過する第1分光戻レーザ光L21の光強度を測定する第1光強度測定器27と、ハーフミラーにより反射された第2分光戻レーザ光L22をその周波数に応じて減衰させる光フィルタ26と、光フィルタにより減衰された第2分光戻レーザ光L22の光強度を測定する第2光強度測定器28と、光フィルタによる光強度の減衰量から戻レーザ光の周波数を算出して出射レーザ光の周波数と共に代入することにより測定箇所における風速・風向を算出する制御部と、を備える。
(もっと読む)
絶対距離値を測定する方法及び測定装置
本発明は、測定装置(10)とターゲット(8)との間の区間(9)に応じて絶対距離値を測定する方法及び測定装置(10)に関する。この場合、多数の個々の測定ステップが、絶対距離値を測定する絶対距離測定器(1)によって実施される。これらの個々の測定ステップと少なくともほぼ同時に、測定装置(10)とターゲット(8)との間の距離変化も、相対距離測定器(2)によってその都度測定され、この距離変化が、絶対距離を算定するために考慮される。特にフィゾー法にしたがって、絶対距離値を測定するため、多数のサンプリングステップによる反復法が使用される。この場合、出力値(A)が、各サンプリングステップで入力値(fn ,fn+1 ,fn+2 ,...)から生成されて測定され、この出力値(A)は、入力値(fn ,fn+1 ,fn+2 ,...)及び距離に依存する。この場合、サンプリングステップと後続するサンプリングステップとの間で生じる距離変化が、その都度測定され、後続するサンプリングステップに対する入力値(fn+1 ,fn+2 ,fn+3 ,...)の算定時にこの距離変化を校正するために使用される。 (もっと読む)
先行車両検出装置
【課題】路面を先行車両と誤認識することのない先行車両検出装置を提供すること。
【解決手段】自車両から照射した照射波の反射波を受信して先行車両の有無を検出する先行車両検出装置において、照射波が路面に照射される走行状態を検出する走行状態検出手段と、走行状態検出手段により照射波が路面に照射される走行状態であることが検出されたとき、反射波の波形に基づいて照射波を反射した物体が先行車両か路面かを判定する判定手段と、を備えた。
(もっと読む)
障害物検出装置
【課題】路面反射板や路面上方構造物を障害物として判断しない障害物検出装置を提供すること。
【解決手段】先行車両検出装置13において、上方照射波30と下方照射波31とは一部重なり合いを生じるように照射波を照射して、上方照射波30と下方照射波31とのそれぞれの反射波強度から照射波が反射した物体の種類を判定するようにした。
(もっと読む)
空間領域の監視装置
空間領域に関する監視装置(1)はアナモルフィック光学系(4)が対応付けられている受信器(2)を有する。さらに監視装置(1)は送信器(10)を有し、この送信器(10)はビームパルス束(11)を用いて受信器(2)に対応付けられている視野(8)を走査する。評価ユニット(12)において実施される短時間積分でのビーム伝播時間検出によって、視野(8)内のオブジェクトの距離画像を形成することができる。  (もっと読む)
(もっと読む)
生理学的機能を遠隔的にモニターするシステムおよび方法
本発明のいくつかの実施態様にしたがって、個体を遠隔的にモニターするシステムおよび方法。特に、該個体の一つまたはそれ以上の生理学的機能と身体的活動力、またはそれらの何れかをモニターすることができる。該個体をモニターするために、該個体の一つまたはそれ以上の表面(すなわち、皮膚、衣類、唇など)上の一つまたはそれ以上の点に対する距離と距離の変化の速度、またはそれらの何れかを時間を通して測定することができる。該個体の表面上の点の距離と距離の速度、またはそれらの何れかの測定に基づいて、該個体の一つまたはそれ以上の生理学的機能と身体的活動力またはそれらの何れかをモニターすることができる。これは生理学的機能と身体的活動力またはそれらの何れかを該個体に接近したり、近傍に配置したりすることなしに遠隔的にモニターすることを可能にしている。 (もっと読む)
航空機の上流の乱気流を予測して測定するためのシステム
本発明は、航空機(14)の上流の乱気流を予測して測定し、該航空機に搭載されて配置されたシステムに関し、該システムは;前記航空機(14)の前部に向けて光ビーム(11)を送信し、かつ散乱された光ビーム(12)を受信するためのライダ(10)と、制御手段と関連付けられた直接検出デバイスと、第1内部補正アルゴリズムを使用する第1処理素子と、第2補正アルゴリズムを使用して、少なくとも1つの航空機制御面のアクチュエータに実行可能な命令を送信する第2処理素子と、を含む。 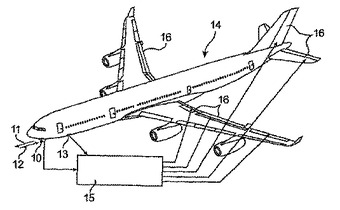 (もっと読む)
(もっと読む)
発熱物体の位置検出装置
【課題】発熱物体の位置検出の高精度化を実現することができるうえに、装置全体の簡略化及び小型化を図ることができる発熱物体の位置検出装置を提供する。
【解決手段】光送信部2と、発熱物体Aが発する赤外線IR及び発熱物体Aで反射した反射光LRを集光する集光レンズ3と、赤外線IR及び反射光LRを分光する分光手段4と、分光手段4を経た赤外線IRを検出する赤外線センサ5と、分光手段4を経た反射光LRを検出する光受信部6と、赤外線センサ5及び光受信部6からのデータに基づいて発熱物体Aまでの距離を測定する信号処理手段7を備えた位置検出装置とし、赤外線画像で捕捉した発熱物体Aの方位及び距離を検出する。
(もっと読む)
障害物検知システム
【課題】 少ない個数のレーダモジュールで車両周囲の広範囲の領域について障害物を検知することが可能な障害物検知システムを提供することを目的とする。
【解決手段】 本発明は、車両に設置される障害物検知システムである。障害物検知システムは、アンテナと、方向変更手段と、障害物検知手段と、回転手段とを備えている。アンテナは、電磁波のビームを出射する。方向変更手段は、アンテナから出射されるビームが進行する軌跡上に設置され、当該ビームの進行方向を変更する。障害物検知手段は、アンテナから出射されるビームの反射波を検知することによって障害物を検知する。回転手段は、アンテナおよび方向変更手段の少なくとも一方を回転させることによってビームの進行方向を変化させる。
(もっと読む)
環境認識システムおよび移動機構
【課題】
測距ターゲットが移動しているときや測距システムが移動しているときでも、正確に測距ターゲットを認識する。
【解決手段】
環境認識システム1は、変調されたビーム102を用いて相対的に移動する物体2を認識する。ビーム発射手段12は、ビームを発射する。ビーム走査手段13は、ビームを走査する。物体からの反射ビームをビーム受信手段が16検出する。ビーム受信手段が受信した信号に基づいて距離画像を距離計測手段17が取得する。距離計測手段が取得した複数の画像を比較して距離画像に含まれる物体の歪みを歪み除去手段が除去する。
(もっと読む)
光電検出デバイス
本発明は、光電検出デバイス、特にはレーザ・スキャナに関する。この光電検出デバイスは、好ましくはパルス化された電磁放射線を送信するための送信デバイスと、前記送信デバイスと関連づけられた少なくとも1つの受信デバイスと、前記送信デバイスによって送信される放射線を監視領域内へ誘導し、且つ前記監視領域により反射される放射線を前記受信デバイスに誘導するために使用される少なくとも1つの偏向デバイスと、を備える。上記送信デバイスは、特定の送信経路に沿って放射線をそれぞれ送信する幾つかの(好ましくは2つの)別個の送信モジュールを備える。  (もっと読む)
(もっと読む)
交通安全システム
車両安全システムが、隣接する車両までの距離を求めるための距離測定装置を備える衝突回避システムを備え、その衝突回避システムは送信機(74)及び受信機(70)を備える。通信システムが、路側端末と通信するために用いられる。通信システムは、その同じ送信機及び受信機をそれぞれ用いて、路側端末との間でデータを送信及び受信する。  (もっと読む)
(もっと読む)
レーザー周辺認識システム
潜在的脅威を検知するために目標位置の周辺区域をレーザー走査する方法は、周辺区域を横切ってパルス化レーザービームを走査し、パルス化レーザービームからのエコーを受信しそしてシーン画像を形成するために複数の周辺区域走査を形成することよりなる。加えて、目標位置の周辺区域において検知された潜在的脅威を認証する方法は、潜在的脅威を検知し、無線で潜在的脅威に質問し、所定の時間間隔内で応答が送信されない場合、又は受信された応答が適正なアクセスコードを備えていない場合は、潜在的脅威は認証されないと宣言する。 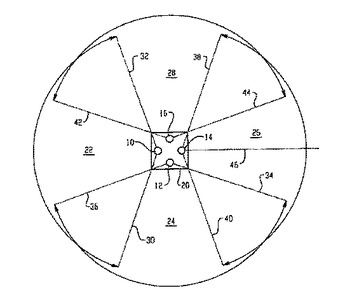 (もっと読む)
(もっと読む)
回帰反射形の安全及び正常確認装置
【課題】 人体や物体が存在していないことの確認だけでなく,装置の正常確認も同時に行うレーザー式安全装置を提供する。
【解決手段】 レーザー光の走査領域を人体や物体が存在していないことを確認するための安全確認領域14と,レーザー光による走査が安全確認領域の全域に及んでいることを確認するための正常確認領域13と,安全及び正常確認を行えない未確認領域12に分割する。安全確認領域と正常確認領域には,回帰反射体17,18を所定の幅,個数又は設置間隔で設けた反射板15,16を備える。安全確認領域の反射板に設けた回帰反射体の幅,個数又は設置間隔と,正常確認領域の反射板に設けた回帰反射体の幅,個数又は設置間隔を異なるものとする。電気信号のパターンが所定の正常パターンと一致する場合は運転許可信号を出力する。
(もっと読む)
301 - 317 / 317
[ Back to top ]