
Fターム[5J084BB28]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学要素 (2,698) | ミラー (802) | 可動ミラー (317)
Fターム[5J084BB28]に分類される特許
101 - 120 / 317
ミラーアクチュエータおよびビーム照射装置

【課題】支持部に対する回動軸の衝突を抑制でき、もって、円滑な動作を実現可能なミラーアクチュエータおよびこのミラーアクチュエータを搭載したビーム照射装置を提供する。
【解決手段】ミラー150をチルト方向に回動可能に支持する支軸111の両端には、抜け止め用のEリング117a、117bが装着されている。これら2つのEリング117a、117bのうち、右側のEリング117aのみを磁性材料により構成する。このEリング117aとマグネット132との間に働く磁力により、支軸111が右側に付勢される。よって、ミラー150のパン方向駆動時に、支軸111が左右に移動するのが抑制され、軸受け116aに対する支軸111の衝突を抑制できる。
(もっと読む)
レーザレーダ装置

【課題】検出物体の検出精度を高め得るレーザレーダ装置を提供する。
【解決手段】フォトダイオード20により検出時間Tが所定の時間範囲ΔT内にあるとして検出される反射光のうち、その光量に対応する受光信号の振幅Aが、異物反射光量Lsより低く設定された異物検出閾値Ad以上であり異物反射光量Lsより高く設定された近点検出閾値An未満である反射光を無効とし、当該振幅Aが近点検出閾値An以上である反射光の検出時間Tに基づいて検出物体までの距離が測定される。
(もっと読む)
光導波路装置および校正システム
【課題】レーザレーダ装置から出射されたレーザ光の反射光が装置内へ入射するまでの時間を長くし得る光導波路装置を提供する。
【解決手段】光導波路装置30は、校正システム10の校正対象であるレーザレーダ装置20から窓部22を透過したレーザ光L0が導入口31aから入射する光導波路31が設けられており、この光導波路31は、その全長が導入口31aと窓部22との間の距離に対して長くなるように複数回巻回されて構成されている。
(もっと読む)
物体検出方法及びその装置
【課題】監視領域上における走査光の走査位置を基準にしなくても、監視領域の全体分に応じた走査光の反射光に関するデータを用いた正確な物体検出を実現すること。
【解決手段】信号処理部3で生成された計測データDを制御装置6がパケット通信により受信して、その計測データDを計測データ記憶領域64aの対応するアドレス箇所に記憶させる度に、受信した所定本数分の走査線に対応する計測データDからそれらの走査線上に存在する物体の検出を行い、さらに、解析結果記憶領域64bに記憶された最新の1フレーム分の物体検出データを用いて、走査範囲Eに存在する物体の検出を行う。1回のパケット通信により制御装置6が信号処理部3から受信する計測データDのデータ量は、走査線の1本分の計測データDと一致するデータ量とすることができる。
(もっと読む)
測距方法及びレーザ測距装置
【課題】演算部に対する負荷を抑えながら高精度の測距が可能な測距方法及びレーザ測距装置を提供することを目的とする。
【解決手段】本発明に係る測距方法及びレーザ測距装置は、合成光の強度をモニタして、所定の強度以上のピーク位置の前後における強度データの対称性を確認することで、被測定物の測定点と対応する反射点の位置情報を取得する。そして、その位置情報に基づいて被測定物までの距離もしくは被測定物の2つの測定点間の厚み方向の距離を測距する。従って、強度データに基づく演算量を低減することが可能となり、演算部に対する負荷を抑えながら、レーザ光の可干渉性を利用した高精度な測距を行うことができる。
(もっと読む)
物体認識装置、プログラム
【課題】様々な大きさの物体を精度よく検出する物体認識装置及びプログラムを提供する。
【解決手段】受光信号の受信強度分布をセグメント化し(S110〜S130)、セグメントが過大セグメントである場合に、セグメントのピークの受信強度Apに、物体までの距離に応じて近距離であるほど小さな値となる閾値係数αを乗じることで領域抽出閾値THaを求め(S140〜S200)、その領域抽出閾値THaより信号強度が大きいセグメント内の領域の幅を、セグメントが表す物体の幅に設定する(S210)。これにより閾値係数α(ひいては領域抽出閾値THa)が大きくなる遠距離では、ビームのすそ野部分の影響が極力排除されるため、物体の幅が過大に検出されることがなく、閾値係数αが小さくなる近距離では、すそ野部分の一部を物体が存在する領域として取り込むことになるため、端ビームが無視されても物体の幅が実際より小さく検出されることがない。
(もっと読む)
光走査装置、レーザレーダ装置、及び光走査方法
【課題】広角度の視野領域の全範囲において感度を一定に保持することができる光走査装置、レーザレーダ装置、及び光走査方法を提供する。
【解決手段】水平方向に対して予め定めた傾斜角度で交差するように配置された透明平板を通してレーザ光を走査する場合に、光源から射出されたレーザ光を水平方向に走査すると共に、光源から射出されたレーザ光の偏光面を透明平板の傾斜角度及び水平方向の方位角に応じて回転させて、偏向されたレーザ光を透明平板側に出力し、透明平板を通してレーザ光を走査する。
(もっと読む)
物体検出システム
【課題】複数のレーザセンサを備えた物体検出システムにおいて、あるレーザセンサから出力したレーザ光を他のレーザセンサが検出することによる誤検出を抑制する。
【解決手段】レーザセンサAは、自身の回転ミラー50の回転角度を算出し(ステップS2)、また、他方のレーザセンサBの回転ミラー50の回転角度を取得し(ステップS3)、これらステップS2、S3で算出、取得した回転角度と、記憶装置130に記憶されている誤検出角度関係とから、誤検出の危険性があるか否かを予測する(ステップS4)。そして、誤検出の危険性があると予測した場合、誤検出の危険性がなくなるように、モータ80の回転速度を調整する(ステップS5)。そのため、レーザセンサBから出力されるレーザ光L3を自身のフォトダイオード100が検出してしまうことが抑制され、その結果、実際には存在しない物体を検出したと判断してしまう誤検出を抑制できる。
(もっと読む)
移動体検出方法及びレーザ距離測定装置
【課題】横断歩道を一団で移動する複数の歩行者の個々の動きを認識でき、横断歩道での歩行者の流れや通行量を把握できる移動体検出方法及びレーザ距離測定装置を提供する。
【解決手段】レーザ光LTを投光する投光部1と、レーザ光LTを走査する走査部と、測定範囲内の歩行者で反射して戻った反射レーザ光LRを受ける受光部2と、受光部2からの受光信号Srにより歩行者の計測データDを作成して発信する信号処理部3と、計測データDを受信して測定結果を出力する制御部6を備え、信号処理部3では、連続して取得する歩行者の計測データDを距離条件でグループ化する処理と、計測データDを複数の高さの閾値で選別する処理と、高さの閾値による高さデータに基づいて歩行者を認識する処理と、歩行者を認識する毎にそれ以前に認識した歩行者との同一性を判定する処理を行う。
(もっと読む)
環境を光学的に走査し測定する装置
レーザスキャナ(10)として構成された、環境を光学的に走査し測定する装置であって、回転鏡(16)によって発光光線(18)を放出する発光素子(17)と、回転鏡(16)および光軸(A)を有する受光レンズ(30)を通過した後にレーザスキャナ(10)の環境内の物体(O)から反射されるかあるいはその他の形で散乱した受光光線(20)を受け取る受光素子(21)と、レーザスキャナ(10)の環境のカラー画像を撮影するカラーカメラ(23)と、多数の測定点(X)について、物体(O)までの距離を求め、この距離をカラー画像と連係させる制御評価ユニット(22)とを含む装置において、カラーカメラ(23)は、受光レンズ(30)の光軸(A)上に配置される。 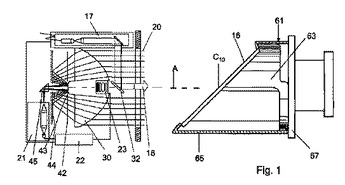 (もっと読む)
(もっと読む)
自律移動装置及びその制御方法
【課題】自己位置推定機能と足元の障害物検出機能とを良好に両立させること。
【解決手段】非接触式の距離センサ17と、移動状況に関する所定の条件に基づいて、足元の障害物検出処理か自己位置推定処理のいずれの処理を実行するか判定する判定部58と、足元の障害物検出処理を実行する場合に、距離センサ17からの測定信号の方向を足元付近に向けて変化させ、自己位置推定処理を実行する場合に、測定信号の方向を遠方の対象物を測定可能となる向きに変化させる反射部19と、距離情報に基づいて足元の障害物を検出する足元障害物検出部57と、距離情報に基づいて自己位置を推定し、移動量から求めた自己位置を、推定した自己位置を用いて補正する自己位置推定部55と、検出した障害物情報と、補正した自己位置とに基づいて、移動装置23の制御を行う走行制御部59と、を備える。
(もっと読む)
距離測定装置
【課題】レーザー光の必要な光量を確保した上で安全性の向上を図る。
【解決手段】レーザー光を出射するレーザー光源2と、レーザー光源から出射されたレーザー光を略平行光にする光学素子3と、所定の角度範囲で回動可能とされ光学素子によって略平行光にされたレーザー光を被測定物100へ向けて反射しレーザー光によって被測定物を走査する投光用ミラー4bと、被測定物で反射されて拡散されたレーザー光を反射する受光用ミラーと、受光用ミラーで反射されたレーザー光を受光する受光素子と、受光用ミラーで反射されたレーザー光を受光素子に集光して導く集光光学系と、受光素子で受光したレーザー光に基づいて生成される受光信号を処理することにより被測定物に関する距離情報を算出する制御部とを備え、レーザー光源と被測定物の間の光路上に光路範囲における外周部のレーザー光を遮蔽する遮蔽部材9を設けた。
(もっと読む)
距離測定装置
【課題】受光素子に対する十分な受光量を確保すると共に受光素子における受光面積の小型化を図る。
【解決手段】レーザー光を出射するレーザー光源2と、レーザー光源から出射されたレーザー光を略平行光にする光学素子3と、所定の角度範囲で回動可能とされ光学素子によって略平行光にされたレーザー光を被測定物100へ向けて反射しレーザー光によって被測定物を走査する投光用ミラー4bと、被測定物で反射されて拡散されたレーザー光を集光する集光レンズ5と、集光レンズによって集光されたレーザー光を受光する受光面7aを有する受光素子7と、レーザー光の径を絞る開口部6aを有し集光レンズと受光素子の間に配置された開口絞り6と、受光素子で受光したレーザー光に基づいて生成される受光信号を処理することにより被測定物に関する距離情報を算出する制御部とを備え、受光素子を開口絞りの近傍に配置した。
(もっと読む)
ビーム照射装置
【課題】ミラーを2軸駆動してレーザ光を走査させる場合に、ミラーの駆動制御を精度よく行うことができるビーム照射装置を提供する。
【解決手段】レーザ光を水平方向斜めからミラー113に入射させた状態で、ミラー113を支軸111、112と支軸124、125の回りに回動させて、レーザ光を水平方向に走査させる。このとき、支軸111、112の回りの前記ミラー113の回動位置に応じて、支軸124、125の回りの前記ミラー113の制御量を変化させる。具体的には、支軸124、125の回りにおいて前記ミラー113を制御するためのPID制御回路28からの制御信号の大きさを、ゲイン調整回路29におけるゲインを調整することで変化させる。
(もっと読む)
測距方法及びレーザ測距装置
【課題】レーザ光の特徴である可干渉性を利用するとともに、被測定物の2つの測定点間の厚み方向の距離を高精度に測定する測距方法及びレーザ測距装置を提供することを目的とする。
【解決手段】本発明に係る測距方法及レーザ測距装置によれば、測定光を第1測定光と第2測定光とに分割し、第1測定光を被測定物6の第1測定点S1に照射した上で、第1測定光と参照光との光路長が等しくなる反射点の位置を取得する。また、第2測定光を被測定物6の第2測定点S2に照射した上で、第2測定光と参照光との光路長が等しくなる反射点の位置を取得する。そして、これらの位置に基づいて第1測定点S1と第2測定点S2間の厚み方向の距離を高精度に測定する。
(もっと読む)
小型マルチスペクトル走査システム
本発明は、主ミラー(1)および副ミラー(2)を備える小型マルチスペクトル走査システムに関連し、これらのミラーは互いに向かい合い、反対方向に同じ角速度で回転されるように適合され、それらの回転軸に対して傾けられる。主ミラーは凹形であり、副ミラーは主ミラーよりも小さく、両ミラーの回転軸は位置合わせされる。この構成により、システムは先行技術のデバイスよりも小型になり、システムが動作周波数に依存することが回避される。 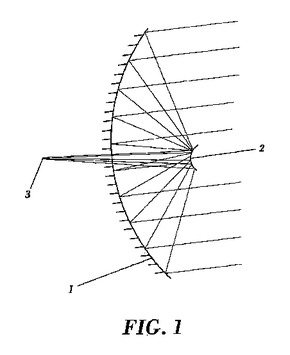 (もっと読む)
(もっと読む)
テラヘルツレーダ装置
【課題】短時間で距離の測定ができるテラヘルツレーダ装置を実現すること。
【解決手段】モード同期周波数制御手段12によってフェムト秒レーザ10、11のモード同期周波数を安定させ、モード同期周波数の差を一定とする。フェムト秒レーザ10からのポンプ光を光伝導アンテナ13に入射させ、テラヘルツコムを発生させる。一方、フェムト秒レーザ11からのプローブ光は、光伝導アンテナ14に入射させ、光伝導アンテナ14に測定物Xにより反射されたテラヘルツコムを入射させることにより、RFコムを発生させる。このRFコムのコムモードを位相差計17により抽出し、抽出したコムモードの位相を測定することにより、測定物Xまでの距離を算出する。複数のコムモードを選択、抽出することで、高ダイナミックレンジな測距が可能となる。
(もっと読む)
距離測定装置
【課題】距離測定装置に入射した光が前方の搬送台車からの反射光であるか否かを高精度で識別でき、誤検知による搬送台車の誤停止等を解消できる距離測定装置を提供する。
【解決手段】軌道に沿って走行する搬送台車の前部に、変調された測定光を平面状に走査する走査部と、走査部で走査された測定光と検出物からの反射光との時間遅れから検出物までの距離を算出する距離演算部とからなる測距装置を配置し、測距装置により前方を走行する搬送台車の後部に配置された再帰性反射部材からの反射光に基づいて搬送台車間の車間距離を検知する距離測定装置であって、走査部により走査された測定光の複数の走査角度と、距離演算部により算出された各走査角度に対応する距離と、各走査角度に対応する反射光の強度のうち、何れか二つの相関関係に基づいて、再帰性反射部材からの反射光であるか否かを識別する識別部を備える。
(もっと読む)
光電スキャナ
【課題】空間領域の走査において従来より大きな角度領域を捕らえられるスキャナの提供。
【解決手段】光線16を出射するための発光器12、第1の部分期間には前方の監視領域26を、また第2の部分期間にはスキャナ10の後方領域を交互に塗りつぶすように第1の偏向方向に光線を周期的に偏向させるための第1の偏向ユニット18、20、監視領域から拡散反射又は直反射された光線32から受光信号を発生させるための受光器38、及び受光信号に基づいて監視領域内の物体30を認識するように構成された評価ユニット40を備える光電スキャナを提供する。このスキャナには、光線を第2の偏向ユニット44へ向けて方向転換させるために後方領域に方向転換ユニット42が設けられ第2の偏向ユニットが光線を第1の偏向方向に対して横方向に延伸する第2の偏向方向に周期的に偏向させるように構成されている。
(もっと読む)
小さいフォームファクタの距離センサ
本明細書に開示する主題は、モバイルデバイスからリモートオブジェクトまでの距離、またはリモートオブジェクトのサイズを決定することに関する。
本発明は、回転可能なマイクロリフレクタを回転させてエネルギーをリモート表面に向ける段階であって、前記回転可能なマイクロリフレクタがモバイルデバイス中に配置され、前記回転させることが前記モバイルデバイスに関係する段階と、前記向けられたエネルギーの結果として生じる前記リモート表面からの反射エネルギーに少なくとも部分的に基づいて距離を測定する段階とを含む。 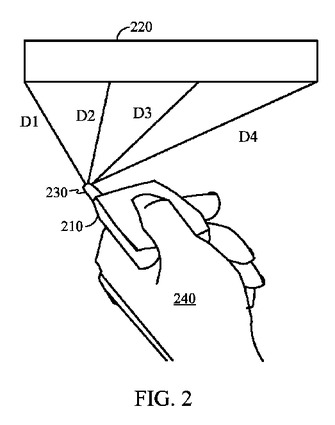 (もっと読む)
(もっと読む)
101 - 120 / 317
[ Back to top ]