
Fターム[5J084BB28]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学要素 (2,698) | ミラー (802) | 可動ミラー (317)
Fターム[5J084BB28]に分類される特許
81 - 100 / 317
レーザスキャナ
【課題】簡単、軽量な構造で、マルチビームを用いたレーザスキャナを提供する。
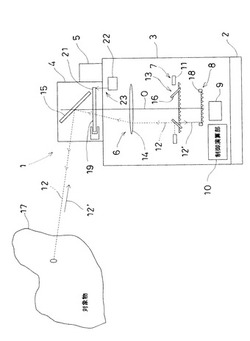
【解決手段】パルスビーム12を全周走査するレーザスキャナ1に於いて、該レーザスキャナが本体部3と該本体部に回転可能に設けられた回動部4とを有し、該回動部がパルスビームを該回動部の中心軸に対して垂直方向に偏向して照射する偏向部材15を具備し、前記本体部は、2次元的に配置され、複数のパルスビームを発する複数の発光源11と、パルスビームを投光、受光する光学系6と、前記回動部の水平回転角を検出する回転角検出部19と、対象物からの反射光12′を前記偏向部材を介して受光し、前記発光源とそれぞれ共役の位置にある複数の受光部18と、該受光部からの受光信号に基づき測距を行う測距部9と、前記発光源の配置位置、前記回転角検出部の検出結果に基づき前記偏向部材から照射されるパルスビームの照射方向を演算する制御演算部10とを具備した。
(もっと読む)
位置検出システム

【構成】位置検出システム100は、LRF12およびメモリ22を備え、検出領域(F)内に存在する人間をLRF12によってセンシングすることで位置を検出し、検出された位置データをメモリ22のバッファに蓄積する。また、人間Aおよび人間Bの位置履歴データに基づいて、すれ違い行動が行われていると判断された場合、すれ違いモデル毎にすれ違い軌跡CTと一致する確率Pが算出される。そして、プロセッサ20は、確率Pの値が最も大きいすれ違いモデルCMに従って人間Bの移動方向を決め、第1所定時間後の人間Bの移動距離を求めることで、人間Bの将来位置を算出する。
【効果】すれ違い行動が行われると、そのすれ違い行動と最も似ているすれ違いモデルを選択することで、人間の将来の位置を予測することができる。
(もっと読む)
信号処理装置、及び走査式測距装置
【課題】走査式測距装置と被測定物との間に障害物が存在する場合であっても、被測定物に対する距離を正確に算出可能な走査式測距装置を提供する。
【解決手段】
走査部で周期的に偏向走査されたパルス状の測定光に対応して、受光部で検出された被測定物からの反射光に対応する反射信号を微分する微分処理部と、一次微分された一次微分反射信号の立上り時期を基準に当該一次微分反射信号の重心位置を算出し、当該重心位置に対応する時期を反射光の検出時期として求め、測定光の出力時期と当該反射光の検出時期との時間差に基づいて被測定物までの距離を算出して出力する演算部と、微分処理部により反射信号が一次微分された一次微分反射信号の立上り及び立下り特性と、反射信号が二次微分された二次微分反射信号の立上り特性に基づいて、反射光が複数の被測定物からの反射光が重畳した反射光であるか否かを判定する波形判定部を備えている。
(もっと読む)
車軸検知装置
【課題】 軸数センサを道路に埋め込むことなく、レーンを通行する車両の車軸を検出することを目的とする。
【解決手段】 強度変調したレーザ光を走査し、路面に向かって斜め下方にレーザ光を放射する微細電子機械素子スキャナと、物体から反射してくる反射光を受光する長尺フォトダイオードとを有した送受光学部を備えて、長尺フォトダイオードの出力光信号の検波信号からレーザ光の反射点までの距離を計測し、得られたレーザ光の反射点までの距離及びレーザ光の照射方向に基づいて車両のタイヤを検知し、軸数をカウントする。
(もっと読む)
監視システム
【課題】監視エリア内に存在する物体をより精度高く検出でき、かつ無線通信媒体を有する物体については各物体の具体的内容をより正確に把握し得る監視システムを提供する。
【解決手段】監視システム1は、レーザセンサ100と無線タグリーダ10とを備えており、レーザセンサ100には、レーザ光走査手段と、レーザ光が物体にて反射した反射光を受光する受光手段と、受光手段による受光結果に基づいて物体の方位を検出する検出手段とが設けられている。また、無線タグリーダ10には、可変指向性アンテナ14と、可変指向性アンテナ14の指向性を制御する指向性制御手段と、可変指向性アンテナ14を介して送受信される電波を媒介として無線通信媒体と無線通信を行う無線通信手段とが設けられている。そして、指向性制御手段は、レーザセンサ100での物体の検出結果に基づいて可変指向性アンテナ14の指向性を制御している。
(もっと読む)
距離測定装置および距離測定方法
【課題】
光コムを用いた距離測定装置において、光量不足、多数の自己ビートから必要なビートのみを信号雑音比(SN比)よく抽出することが困難であるという課題を解決し、反射率が低い表面または表面が散乱面である10m程度遠方の被測定物までの絶対距離を0.1mm以上の精度で光学的で非接触な手法により簡便に測定できるようにする。
【解決手段】
対象物までの距離を測定する距離測定装置において、光源と対象物で反射または散乱された複数のCWレーザーの間のビート信号のビート信号の位相と,光源と対象物へ照射する前の複数のCWレーザーによるビート信号のビート信号の位相を比較することによって対象物までの距離を測定するようにした。
(もっと読む)
光走査装置及び距離測定装置
【課題】反射面を備えた回転反射体の回転軸の傾斜角φが0°の場合に比べて、反射面で反射された走査光による走査軌跡をより柔軟に設定することができる、光走査装置及び距離測定装置を提供する。
【解決手段】基準方向及び基準方向と直交する方向とは異なる方向に光を射出する光源と、回転軸に斜めに交差し且つ光源から入射角θで入射した光を反射する少なくとも1つの反射面を有し、基準方向に対し傾斜角φで傾けられた回転軸の周りに回転する回転反射体と、を備えた光走査装置である。基準方向と予め定めた角度で交差する方向を所定の走査方向として、回転軸の傾斜角φ≠0°で、且つ反射面で反射された走査光の所定の走査方向に対する偏差が回転軸の傾斜角φ=0°で得られる走査光の所定の走査方向に対する偏差より小さくなるように入射角θに応じて前記傾斜角φが予め設定されている。
(もっと読む)
認識装置
【課題】横切り車両を対象にした状態認識の精度良く行うこと。
【解決手段】レーダ波の反射点の位置座標(x,y)を取得する(S110)。そして、反射点に対して1線分および2線分をフィッティングする(S120)。次に、1線分、2線分のうち、二乗和が小さい方を選択する(S130)。そして、観測値、車長方向先端位置及び車長方向後端位置を算出し(S140)、算出した車長方向後端位置が、走査範囲の端領域に位置するかを判定する(S150)。車長方向後端位置が端領域に位置すると判定すると(S150NO)、車長方向先端位置を用いた状態認識を行う(S170)。車長方向先端位置は、横切り車両が走査範囲の端に位置していたとしても、精度良く把握できるので、状態認識も精度良く行うことができる。
(もっと読む)
時間計測装置およびセンサ装置
【課題】計測時間の計測精度の低下を抑制し得る時間計測装置およびセンサ装置を提供する。
【解決手段】レーザレーダ装置1に採用される制御回路70の時間計測回路71では、計測時間Tが、デジタル値D1およびデジタル値D2の比率と基準時間Toとに基づいて求められる。さらに、比率演算時の時間分解能Tr1が、比率演算時の演算誤差e1に等しくなるように設定されて、リング遅延パルス発生回路81の遅延素子(ゲートディレイ)の時間分解能よりも細かく設定される。
(もっと読む)
遠隔監視システム
【課題】監視領域と監視室とが離れている場合であっても、低コストで監視業務を効率化することができ、障害物の内容や障害物検知装置の異常を的確に把握することができる遠隔監視システムを提供する。
【解決手段】レーザ光Lを照射して計測データDを出力する計測手段1と、障害物を検出する障害物検出手段2と、障害物検出時に警報信号を出力する出力手段3と、計測データDを単位時間Δt毎に区切った計測データファイルFを作成する計測データ処理手段4と、計測データファイルFを保存する記憶手段5と、計測データファイルFを出力手段3に伝送する通信手段6と、を備え、計測データ処理手段4は、障害物が検出された場合に障害物検出時tnの計測データDを含む計測データファイルFnを抽出して伝送する。
(もっと読む)
ビーム照射装置
【課題】簡素な構成にて、可動部を走査開始位置に迅速に戻すことが可能なビーム照射装置を提供する。
【解決手段】ミラーアクチュエータ100は、支軸111、112の周りに回動可能なミラーホルダ110と、ミラーホルダ110に装着されたミラー113と、ミラーホルダ110に配されたコイル114とを有する。第1FPC10は、コイル114に電気的に接続されるとともに、撓み方向にバネ性を有し、このバネ性を用いてミラーホルダ110を支軸111、112の周りの走査開始位置に向かって付勢するように配置されている。この付勢により、ミラーホルダ110は、走査終了位置から走査開始位置に迅速に戻される。
(もっと読む)
レーザセンサ装置
【課題】簡単な構成で、装置の姿勢変化を検出できるようにする。
【解決手段】装置本体ケース2には、侵入検出用レーザ照射口11の反対側にレーザ通過口12が形成されている。建物の壁14におけるレーザ通過口12と対向する部位には姿勢変化検出用シール3が装着される。レーザ照射部5から照射されたレーザ光は、回転ミラーで展開され、レーザ通過口12を通してシール3をスキャンしてレーザ受光部6により受光される。制御装置10は、レーザ通過口12を通して戻ってくるレーザ光がレーザ受光部6で受光されると、このレーザ受光パターンを当該展開周回とこれ以前での展開周回とで比較し、同じであれば姿勢変化無しと判断し、異なれば姿勢変化有りと判断する。
(もっと読む)
光走査装置及びレーザレーダ装置
【課題】小型化、低コスト化を実現できるとともに、受光感度がよくて距離測定精度の高いレーザレーダ装置を提供する。
【解決手段】レーザレーダ装置10は、装置本体を構成するベースフレーム12と、ベースフレーム12の所定位置に固定され、レーザ光を出射する光源14と、光源14からの出射光を図示しない対象物に向けて走査する光走査装置16とを有している。光走査装置16はリコン基板から半導体微細加工法により可動板(反射ミラー)やトーションバー等が一体に形成されており、可動板の中央部にはフォトダイオードが一体に形成されている。対象物からの反射光22は、光学部品を介することなく直接フォトダイオードにより受光される。
(もっと読む)
三次元測距装置及び移動ロボット
【課題】小型化及び移動ロボットに容易に搭載可能な三次元測距装置を提供する。
【解決手段】三次元測距装置1は、光学部20と信号処理部30を備える。光学部20は、レーザ光を受光及び発光するレーザ受発光部2と、複数のミラー面を有し、レーザ受発光部2から発光するレーザ光の光軸と直交する軸C1を回転軸として回転駆動され、レーザ受発光部2から照射されたレーザ光をミラー面で反射して対象物に照射すると共に、対象物から反射されたレーザ光を反射してレーザ受発光部2に導くポリゴンミラー3と、を有する。信号処理部30は、ポリゴンミラー3の回転制御とレーザ受発光部2からのレーザ光の照射タイミングの制御を行うと共に、レーザ光の受光タイミングから対象物までの距離情報を演算する。光学部20は、回転軸C1に直交する軸を回転軸C2として、外部駆動装置を用いて揺動又は回転動作される。
(もっと読む)
レーザ測定装置
【課題】レーザ光の走査方向を様々な向きに変化させやすく設置場所に応じた多様なエリア設定が可能な構成をより小型且つ簡易に実現する。
【解決手段】レーザ測定装置1は、偏向部41を中心軸42aに対して相対的に変位させることで、空間に照射されるレーザ光L1の水平面に対する傾斜角度を変化させる傾斜角度変更部100を備え、更に、偏向部41からのレーザ光L1の走査経路上に配置される受光面91を備え、当該受光面91に入射するレーザ光L1の入射高さを検出する受光センサ90が設けられている。そして、レーザダイオード10にてレーザ光L1が発生してから当該レーザ光L1に応じた反射光がフォトダイオード20によって検出されるまでの経過時間を検出すると共に、その経過時間と受光センサ90によって検出された入射高さとに基づいて検出物体の位置を検出するように構成されている。
(もっと読む)
レーザレーダ装置
【課題】検出物体の検出精度を高め得るレーザレーダ装置を提供する。
【解決手段】所定の回動角度において検出される受光波形が前回の同一回動角度において検出された波形に一致するとみなされる検出状態が継続して検出される場合に、この受光波形がその回動角度の背景波形として設定される。そして、遠距離側の受光波形の検出時間Tfがその回動角度における背景波形の検出時間Toに相当する、2つの波形が検出されるとき、この遠距離側の受光波形と背景波形との比率に基づいて、近距離側の受光波形に応じて検出される検出物体の回動方向長さが演算されて測定される。
(もっと読む)
ビーム照射装置および半導体レーザ装置
【課題】レーザチップの後面側から出射されるレーザ光を簡素な構成にて効果的に排除できるビーム照射装置および半導体レーザ装置を提供する。
【解決手段】ビーム照射装置は、半導体レーザ401と、半導体レーザ401から出射されたレーザ光が入射するレンズ402と、レンズ402を透過したレーザ光を目標領域においてを走査させる走査部とを備える。半導体レーザ401は、レーザチップ401cと、レーザチップ401を収容するキャップ40aと、キャップに形成されレーザチップ401cから出射されたレーザ光が通過する出射口401bとを備える。出射口401bに、レンズ402に対するレーザ光の入射領域を制限するためのアパーチャの機能を持たせる。
(もっと読む)
光波距離測定装置
【課題】 近距離から遠距離までの受光レンジにわたって測定に支障なく受光光量が得られ、もって、高精度で安定した測距を行うことができる光波距離測定装置を提供する。
【解決手段】
本発明の光波距離測定装置は、測定光を検出物体1に向けて投光する投光系4と、この検出物体1からの反射光を集光する一枚の受光レンズ11と、受光レンズ11により集光された反射光を受光する受光素子12とを有し、受光レンズ11のレンズ周辺部位が近距離に存在する検出物体1を検出する近距離検出用レンズ部位11aとされ、受光レンズ11の近距離検出用レンズ部位よりも内側のレンズの部位が遠距離に存在する検出物体1を検出する遠距離検出用レンズ部位11bとされている。
(もっと読む)
レーザレーダ装置
【課題】レーザ光が透過板で反射して生じる外乱光に起因する誤検出を効果的に防止し得るレーザレーダ装置を提供する。
【解決手段】レーザレーダ装置1は、回動反射機構40などの各種部品を収容するケース3を備えており、このケース3には、凹面鏡41(偏向手段)からのレーザ光L1の走査経路上を閉塞する透過板80が設けられている。更に、透過板80の内壁部には、凹面鏡41からのレーザ光L1の一部が当該透過板80で反射して生じる外乱光L3を集光し、当該外乱光L3を、凹面鏡41、ミラー30(反射光誘導部)、及びフォトダイオード20(光検出手段)から外れた位置に導く導光部81が形成されている。
(もっと読む)
ミラーアクチュエータおよびビーム照射装置
【課題】支持部に対する回動軸の衝突を抑制でき、もって、円滑な動作を実現可能なミラーアクチュエータおよびこのミラーアクチュエータを搭載したビーム照射装置を提供する。
【解決手段】ミラー150をチルト方向に回動可能に支持する支軸111の両端には、抜け止め用のEリング117a、117bが装着されている。これら2つのEリング117a、117bのうち、右側のEリング117aのみを磁性材料により構成する。このEリング117aとマグネット132との間に働く磁力により、支軸111が右側に付勢される。よって、ミラー150のパン方向駆動時に、支軸111が左右に移動するのが抑制され、軸受け116aに対する支軸111の衝突を抑制できる。
(もっと読む)
81 - 100 / 317
[ Back to top ]