
Fターム[5J084CA70]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | メモリ (352)
Fターム[5J084CA70]に分類される特許
201 - 220 / 352
対象物測距装置及びプログラム
【課題】検出した対象物までの距離を精度良く算出することができる対象物測距装置及びプログラムを提供する。
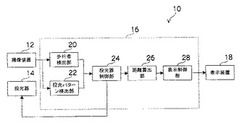
【解決手段】投光パターン検出部22は、画像上の投光パターン34を検出し、歩行者検出部20は、画像上の歩行者を検出し、投光器制御部24は、歩行者32の画像上の位置座標、及び投光パターン34の画像上の投光位置座標を算出し、2点の偏差が所定値以下となるような投光器14の投光角度を算出し、算出した投光角度で投光されるよう投光器14を制御し、2点の偏差が所定値以下となった場合には、撮像装置12と投光器14との距離、投光位置のX座標、及び投光器14の水平方向の投光角度に基づいて、歩行者32までの距離を算出する。
(もっと読む)
移動体配置計測システム及び移動体搭載システム

【課題】簡易に移動体の配置を計測することが可能な移動体配置計測システム及び移動体搭載システムを提供する。
【解決手段】自律走行ロボット400に配置された通信装置100が全外周にわたって問い合わせ信号に対応する光を発光すると、当該光を受光した信号発生装置300は、自身の固体番号を含んだ識別信号に対応する光を発光する。そして、この光は、通信装置100によって受光され、当該通信装置100に接続された計測装置200は、問い合わせ信号に対応する光と、識別信号に対応する光のそれぞれの初受光の時間と、識別信号に対応する光の到来方向とに基づいて、自律走行ロボット400の位置及び方位や、自律走行ロボット400からの信号発生装置300の方向を計測する。
(もっと読む)
物体検出装置および物体検出方法
【課題】静止物体および移動物体についての座標算出を高精度に行うこと。
【解決手段】画像検知部が、車両に搭載されたカメラによって時系列に撮像された2つの画像を対比することによって静止物体の相対的な空間配置をあらわす相対3次元座標を取得し、レーダ検知部が、画像に対応する範囲について照射した照射波に係る反射波に基づいて静止物体および移動物体に係る距離および方位を取得し、物体座標認識部が、取得された方位に存在する前記画像内の静止物体について取得された距離を用いて相対3次元座標から絶対3次元座標を算出するように物体検出装置を構成する。
(もっと読む)
光学式変位計
【課題】
1次元イメージセンサに2つの出力を設けた時に発生する増幅回路のオフセット量及びゲインの個体ばらつきの影響を低減した光学式変位計を提供することを目的とする。
【解決手段】
1次元イメージセンサ20の奇数画素20aと偶数画素20bの受光量を異なる出力ポートから個別に読み出して、異なる増幅回路15a、15bによって独立して増幅する。増幅された奇数画素20a、偶数画素20bの2つの受光量から形成された2つの受光量分布から、各々受光量のピークとなる画素位置を算出する。算出された2つの画素位置に基づいて、測定対象物までの距離を算出する。。
(もっと読む)
物理量センサおよび物理量計測方法
【課題】三角波頂点の過渡応答の影響を軽減する。
【解決手段】物理量センサは、半導体レーザ1と、三角波の極大部と極小部とを丸めた波形の駆動電流を半導体レーザ1に供給するレーザドライバ4と、半導体レーザ1から放射されたレーザ光と測定対象10からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出する検出手段(フォトダイオード2、電流−電圧変換増幅器5)と、干渉波形の情報から、測定対象の物理量を計測する計測手段(フィルタ回路6、計数装置7、演算装置8)とを有する。
(もっと読む)
光位相差検出式の物体検知センサ
【課題】受光素子に受光される光が過小もしくは過大である場合でも、正確に物体の有無を検知することができる光位相差検出式の物体検知センサを提供する。
【解決手段】第1の周期ごとに受光信号71c〜77cの振幅を測定すると共に、第2の周期ごとに上記振幅に関する平均値AA1〜AA7を算出する振幅平均値算出手段18aと、第1の周期ごとに投光信号50b〜57bと受光信号70b〜77bとの位相差を測定すると共に、第3の周期ごとに上記位相差に関する平均値PA1〜PA7を算出する位相差平均値算出手段18bと、振幅平均値AA1〜AA7と振幅参照値AR1〜AR7との差が第1の範囲外にある場合と、そうでない場合であって位相差平均値PA1〜PA7と位相差参照値PR1〜PR7との差が第2の範囲外にある場合とにおいて、検知領域内に物体が有ると判定する判定手段18eと、を含むようにした。
(もっと読む)
床面検出システム、移動ロボット及び床面検出方法
【課題】正確に床検出を行うことが可能な床面検出システム、移動ロボットや床面検出方法を提供すること。
【解決手段】本発明にかかる床面検出システムは、移動ロボット1に設けられている。まず、姿勢角センサ13の検出した姿勢角データに基づいて複数のセンサ角度候補を設定する。次に、複数のセンサ角度候補のそれぞれについて距離画像センサ12の検出した距離画像データに基づいて床検出を行う。そして、複数のセンサ角度候補のうち、最も多く床検出された候補を、当該床面に対する距離画像センサの角度として選択する。
(もっと読む)
3次元形状測定器
【課題】レーザ光の照射位置における戻り光の正確な光量による計測が可能な形状測定装置を有する3次元形状測定器を提供すること。
【解決手段】レーザダイオード2と、第1光学系と、照射位置移動手段と、エンコーダ6aと、第2光学系と、CCDラインセンサ部13と、入射光量測定手段とを有し、検知手段から出力された検知信号により所定時間の間隔を有する複数のタイミング信号が生成され、タイミング信号によってCCDのリセットタイミングが制御されており、一のタイミング信号後に確認用レーザ光をレーザダイオード2から照射し、確認用レーザ光の光量を入射光量測定手段により測定し、入射光量測定手段により測定された確認用レーザ光の光量から測定用レーザ光の発光量が決定される。
(もっと読む)
レーザレーダ装置および輸送機器
【課題】処理すべきデータの量を増大させることなく対象物までの距離を高精度で測定することが可能なレーザレーダ装置およびそれを備えた輸送機器を提供することである。
【解決手段】シリアルパラレル変換器140は、サンプルデータSMをnビットのパラレルデータPDに順次変換する。カウンタ回路150は、基本クロック信号CKの周期のn倍の周期を有するパラレルクロック信号PCKに基づいて、連続する0ブロックの数をカウントし、カウント結果を示すカウンタ出力信号CUを生成する。処理部180は、発射光の受光時におけるパラレルデータPD、反射光の受光時におけるパラレルデータPDおよび発射光の受光時と反射光の受光時との間での0ブロックの数を記憶部160に記憶し、記憶部160に記憶されたパラレルデータPDおよびカウンタ出力信号CUに基づいて距離を算出し、算出結果を距離信号DSとして出力する。
(もっと読む)
レーザレーダ装置
【課題】装置の小型化を実現することができるようにする。
【解決手段】レーザ光源18によってレーザ光を照射し、照射されたレーザ光が、2焦点レンズ16の中央部分16Aを透過する。2焦点レンズ16の中央部分16Aを透過したレーザ光は、測定領域内の対象物で反射し、反射光が、2焦点レンズ16の周辺部分16Bによって焦点位置に集光される。そして、焦点位置を含む所定領域内に配置された受光素子22によって、反射光が受光される。
(もっと読む)
ビーム照射装置
【課題】目標領域内におけるスキャン動作を精度よく行い得るビーム照射装置を提供する。
【解決手段】制御処理部202は、ミラーアアクチュエータ100を第1基準位置と第2基準位置の近傍域で2次元的に駆動させ、これら基準位置を検出した時のPSD106の出力値(座標データ)を記憶する。温度変化や経年変化等の影響でPSDの状態が初期状態から変化すると、図8(b)に示す如く、記憶された座標データ(第1基準点R1´、第2基準点R2´)は、初期状態において設定した座標データ(第1基準点R1、第2基準点R2)からずれるようになる。制御処理部202は、これら2つの基準点におけるズレ量ΔP1、ΔP2とズレ量ΔQ1、ΔQ2に基づいて目標値テーブル202aのデータ校正を行い、校正した目標値テーブルを用いてサーボ動作を行う。
(もっと読む)
対象検出装置、対象検出方法、および対象検出プログラム
【課題】レーザセンサを用いた対象検出技術において、広い検出範囲を維持したまま、誤検出を減らす。
【解決手段】対象検出方法は、レーザ投受光部の取付位置から斜め下方にレーザビームを発射することで対象を検出するための方法であって、レーザ投受光部から被検出物までの距離情報を取得する距離情報取ステップと、被検出物がレーザ投受光部側に接近してくる際に被検出物の追跡が途切れたか否かを判定可能である追跡消滅判定ステップと、被検出物の追跡が途切れた場合に、被検出物の追跡が途切れる直前の距離情報に基づいて、被検出物が対象であるか又は非対象であるかを判定する対象判定ステップとを備えている。
(もっと読む)
検出センサ、アンプ本体
【課題】不具合の究明が可能な検出センサを提供する。
【解決手段】検出センサ1は、検出対象物の有無に応じた検出動作を行う検出手段15と、その検出動作における過去の検出距離情報が記憶される記憶手段32と、外部からのトリガ信号に応じて記憶手段32に記憶された検出距離情報を出力する出力手段15と、を備える。
(もっと読む)
距離計測装置、距離計測方法および車両
【課題】背景光の周波数が変化しても、被検物までの距離を正確に計測できる距離計測装置を提供する。
【解決手段】所定周波数で変調された光を照射する投光装置1と、照射された光の反射光を撮像する撮像装置2と、撮像装置2で得られた撮像信号の同期検波を行う同期検波処理部32と、同期検波によって得られた信号に基づいて被検物までの距離情報を求める距離算出部33と、撮像装置2で得られる撮像信号に基づいて、この撮像信号に含まれる周波数成分と識別可能な照射光の周波数を求める照射周波数算出部34と、その照射光の周波数によって投光装置1の所定周波数を変更する駆動制御部31とを備える。
(もっと読む)
画像センサデータに距離センサデータをマッピングする方法及び装置
第1の距離センサ(3(1))からの第1の距離センサデータをカメラ(9(j))からの画像データにマッピングする方法及び装置。当該方法は、モバイル・システムに搭載された位置判定装置からの時間データ及び位置データと、モバイル・システムに搭載された少なくとも第1の距離センサ(3(1))からの第1の距離センサデータと、前記モバイル・システムに搭載された少なくとも1つのカメラ(9(j))からの画像データとを受信する工程と、第1の距離センサデータ内で、少なくとも1つの物体に関連する第1の点群を識別する工程と、第1の点群に基づいて物体に関連するマスクを生成する工程と、少なくとも1つのカメラ(9(j))からの画像データ内に存在するのと同一の物体に関連する物体画像データ上に、マスクをマッピングする工程と、物体画像データの少なくとも一部分に対して、予め定められた画像処理技術を実行する工程とを含む。  (もっと読む)
(もっと読む)
測距装置および測距方法並びにプログラム
【課題】精度良くかつ高速に測距を行うことができるようにする。
【解決手段】測距光源16が、所定周期にて強度が時間的に変化するように変調された第1の測距光、および所定周期にて強度が一定のパルス波状に変調された第2の測距光を切換可能に発光する。第1の測距光を発光し、第1の測距光の変調周期における位相が異なる複数の受光期間において複数の第1の受光信号を取得し、複数の第1の受光信号に基づいて、第1の測距光と第1の測距光の反射光との位相差を算出し、位相差に基づいて第2の測距光の位相を第1の測距光とは異なるように変更して第2の測距光を発光する。第2の測距光の変調周期における位相差に応じた複数の受光期間において複数の第2の受光信号を取得し、複数の第1の受光信号に基づいて、距離情報の算出に使用する第2の受光信号を選択する。距離画像生成部31が、選択した第2の事項信号を用いて距離情報を算出する。
(もっと読む)
測距装置
【課題】目標物体周りの媒質の特性により計測された距離を補正することで目標物体までの距離を正確に測距可能な測距装置を提供すること。
【解決手段】目標物体に向け信号光を投射する送信光学系20と、前記目標物体で反射された前記信号光を受信する受信光学系30と、前記受信光学系における信号光の集光位置に配置された受光素子12と、前記目標物体までの媒質に応じた測距モードを選択するモード選択手段41と、選択された前記測距モードに対応する媒質の特性を用いて、前記信号光の送信時と受信時との時間差から前記目標物体までの距離を算出する制御装置100と、を有する測距装置150。
(もっと読む)
測距装置および測距方法並びにプログラム
【課題】精度良く測距を行うことができるようにする。
【解決手段】測距光源16が、所定周期にて強度が時間的に変化するように変調された第1の測距光、および所定周期にて強度が一定のパルス波状に変調された第2の測距光を切換可能に発光する。第1の測距光を発光し、第1の測距光の変調周期における位相が異なる複数の受光期間において複数の第1の受光信号を取得し、次いで、第2の測距光を発光し、第2の測距光の変調周期における複数の受光期間において複数の第2の受光信号を取得し、複数の第1の受光信号に基づいて、距離情報の算出に使用する第2の受光信号を選択する。距離画像生成部31が、選択した第2の事項信号を用いて距離情報を算出する。
(もっと読む)
物理量センサおよび物理量計測方法
【課題】物体の高速検知と物理量の高分解能計測とを両立させる。
【解決手段】物理量センサは、半導体レーザ1と、半導体レーザ1から放射されたレーザ光とその戻り光とを受光するフォトダイオード2と、フォトダイオード2の出力信号に含まれる、半導体レーザから放射されたレーザ光とその戻り光との自己結合効果によって生じる干渉波形の周期を検出し、反射壁面10による干渉波形の周期と異なる周期の干渉波形が所定の条件を満たすときに、レーザ光の放射方向に物体12が存在すると判定する物体検知装置11と、フォトダイオード2の出力信号に含まれる干渉の情報から物体12の物理量を計測する計測手段(電流−電圧変換増幅器5、フィルタ回路6、計数装置7、演算装置8)とを有する。
(もっと読む)
侵入物に対してゲートの閉じる面を安全に保つために、垂直又は水平に移動するゲートを制御する方法
駆動装置により移動するドアーを制御する装置であって、ドアーは、長方形のゲート開口部を開位置から閉位置に移動するようになっており、ドアーが閉位置に移動している場合、侵入物が入ってくることを検出できるようになっていて、距離測定検出器のビームがドアーの移動面を90°の検出範囲で横切るようになっており、距離測定検出器のビームは、所定のスキャン段階において、ゲート先端部に当たり、続いてドアーの側面のガイド部材に当たるようになっていて、そしてその距離測定限界値はゲート先端部において特性値と一致し、側面のガイド部材において一つの特性曲線に一致しており、そしてその距離測定限界値がそれぞれの距離測定検出器と比較され、距離測定検出器が所定の許容範囲内で距離測定限界値より小さい場合には、衝突が検出されたことになる。  (もっと読む)
(もっと読む)
201 - 220 / 352
[ Back to top ]