
Fターム[5J084CA70]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | メモリ (352)
Fターム[5J084CA70]に分類される特許
121 - 140 / 352
物体検出装置および情報取得装置
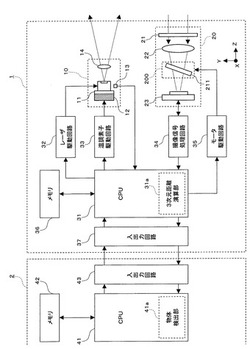
【課題】簡素な構成にて目標領域の情報を精度よく取得できる情報取得装置およびこれを搭載する物体検出装置を提供する。
【解決手段】情報取得装置1は、波長800nm程度の光を出射するレーザ光源11と、レーザ光源11の温度を調節する温調素子12と、レーザ光源11の温度を検出する温度センサ13と、目標領域から反射された反射光を透過させるためのフィルタ211と、フィルタ211を透過した反射光を受光して信号を出力するCMOSイメージセンサ23と、反射光に対するフィルタ211の傾き角を変化させるフィルタ駆動部200とを備える。CPU31は、温調素子12により設定可能な前記レーザ光源11の温度範囲内で、CMOSイメージセンサ23の受光量が最大となるよう温調素子12およびフィルタ駆動部200を制御する。
(もっと読む)
振動振幅計測装置および振動振幅計測方法

【課題】物体の振動振幅を精度良く求める。
【解決手段】振動振幅計測装置は、物体12にレーザ光を放射する半導体レーザ1と、発振波長が増加する期間と発振波長が減少する期間とが交互に存在するように半導体レーザ1を動作させるレーザドライバ4と、半導体レーザ1から放射されたレーザ光と物体12からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出するフォトダイオード2および電流−電圧変換増幅部5と、電流−電圧変換増幅部5の出力信号に含まれる干渉波形を数える計数部7と、計数結果に基づいて物体12の振動の最大速度を算出する振動最大速度算出部8と、計数結果に基づいて物体12の振動周波数を算出する振動周波数算出部9と、振動最大速度と振動周波数とから物体12の振動振幅を算出する振動振幅算出部10とを備える。
(もっと読む)
光走査装置、レーザレーダ装置、及び光走査方法
【課題】広角度の視野領域の全範囲において感度を一定に保持することができる光走査装置、レーザレーダ装置、及び光走査方法を提供する。
【解決手段】水平方向に対して予め定めた傾斜角度で交差するように配置された透明平板を通してレーザ光を走査する場合に、光源から射出されたレーザ光を水平方向に走査すると共に、光源から射出されたレーザ光の偏光面を透明平板の傾斜角度及び水平方向の方位角に応じて回転させて、偏向されたレーザ光を透明平板側に出力し、透明平板を通してレーザ光を走査する。
(もっと読む)
物体検出システム
【課題】複数のレーザセンサを備えた物体検出システムにおいて、あるレーザセンサから出力したレーザ光を他のレーザセンサが検出することによる誤検出を抑制する。
【解決手段】レーザセンサAは、自身の回転ミラー50の回転角度を算出し(ステップS2)、また、他方のレーザセンサBの回転ミラー50の回転角度を取得し(ステップS3)、これらステップS2、S3で算出、取得した回転角度と、記憶装置130に記憶されている誤検出角度関係とから、誤検出の危険性があるか否かを予測する(ステップS4)。そして、誤検出の危険性があると予測した場合、誤検出の危険性がなくなるように、モータ80の回転速度を調整する(ステップS5)。そのため、レーザセンサBから出力されるレーザ光L3を自身のフォトダイオード100が検出してしまうことが抑制され、その結果、実際には存在しない物体を検出したと判断してしまう誤検出を抑制できる。
(もっと読む)
光測距装置
【課題】レーザ安全の基準を満たす様に光測距装置を最適に制御する。
【解決手段】光測距装置は、光反射面を有する可動部が揺動することで光反射面に入射される光を光走査できる光走査部と、可動部を揺動させる駆動信号を、可動部が有する共振周波数に合わせて設定された駆動周波数で、光走査部に供給し可動部を揺動駆動する走査駆動部と、光反射面に向かってレーザ光を投光する光源部と、光反射面で反射走査されたレーザ光が物体により反射された反射光を受光する受光部と、レーザ光の各照射位置間の距離が所定値以上になる様に設定された、レーザ光の投光タイミングを光源部に指令する光源制御部と、レーザ光の投光及び受光タイミングに基づいて物体の距離を計測する測距部と、設定されている駆動周波数と投光タイミングとを共振周波数に合わせて変更する変更手段と、を備える。
(もっと読む)
物理量センサおよび物理量計測方法
【課題】物体の物理量を高い分解能で計測し、計測に要する時間を短縮する。
【解決手段】物理量センサは、少なくとも発振波長が連続的に単調増加する発振期間が繰り返し存在するように半導体レーザ1−1を動作させるレーザドライバ4−1と、レーザ1−1と発振波長の増減が逆になるように半導体レーザ1−2を動作させるレーザドライバ4−2と、レーザ1−1,1−2からのレーザ光とその戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出するフォトダイオード2−1,2−2および電流−電圧変換増幅部5−1,5−2と、電流−電圧変換増幅部5−1,5−2の出力信号に含まれる干渉波形の周期を計測する信号抽出部7−1,7−2と、信号抽出部7−1,7−2の計測結果に基づいて物体10との距離および物体10の速度を算出する演算部8とを有する。
(もっと読む)
測距方法及びレーザ測距装置
【課題】レーザ光の特徴である可干渉性を利用するとともに、被測定物の2つの測定点間の厚み方向の距離を高精度に測定する測距方法及びレーザ測距装置を提供することを目的とする。
【解決手段】本発明に係る測距方法及レーザ測距装置によれば、測定光を第1測定光と第2測定光とに分割し、第1測定光を被測定物6の第1測定点S1に照射した上で、第1測定光と参照光との光路長が等しくなる反射点の位置を取得する。また、第2測定光を被測定物6の第2測定点S2に照射した上で、第2測定光と参照光との光路長が等しくなる反射点の位置を取得する。そして、これらの位置に基づいて第1測定点S1と第2測定点S2間の厚み方向の距離を高精度に測定する。
(もっと読む)
光検出装置及び電子機器
【課題】誤検知を起こすおそれが低い高性能の光検出装置を提供する。
【解決手段】本発明に係る光検出装置1は、供給される電流に応じた強度の光を出射するLED2と、LED2が出射した光であって、被照射物により反射された光を受光するフォトダイオード3と、フォトダイオード3が受光した光の量が予め設定された設定値と同一になるか又は当該設定値を越した場合に、LED2からフォトダイオード3までの光の経路の途中に被検出物が存在すると認定し、フォトダイオード3が受光した光の量が当該設定値未満である場合に、LED2からフォトダイオード3までの光の経路の途中に被検出物が存在しないと認定する、認定部21と、被検出物が存在しないと認定部21が認定した場合に、LED2に供給される電流の値を当該電流の値よりも大きい値に変更するスキャン処理を行う処理部22と、を備えている。
(もっと読む)
自律移動装置及びその制御方法
【課題】自己位置推定機能と足元の障害物検出機能とを良好に両立させること。
【解決手段】非接触式の距離センサ17と、移動状況に関する所定の条件に基づいて、足元の障害物検出処理か自己位置推定処理のいずれの処理を実行するか判定する判定部58と、足元の障害物検出処理を実行する場合に、距離センサ17からの測定信号の方向を足元付近に向けて変化させ、自己位置推定処理を実行する場合に、測定信号の方向を遠方の対象物を測定可能となる向きに変化させる反射部19と、距離情報に基づいて足元の障害物を検出する足元障害物検出部57と、距離情報に基づいて自己位置を推定し、移動量から求めた自己位置を、推定した自己位置を用いて補正する自己位置推定部55と、検出した障害物情報と、補正した自己位置とに基づいて、移動装置23の制御を行う走行制御部59と、を備える。
(もっと読む)
距離画像取得装置
【課題】ファイババンドル型イメージガイドの屈曲に起因して距離画像の各画素間に相対的な誤差が生じることを抑制することが可能な距離画像取得装置を提供する。
【解決手段】距離画像取得装置1は、可撓性外装体3と、光源21と、第1光ガイドファイバ7と、第2光ガイドファイバ9と、反射光を受光し、基端面11Tから出射させるファイババンドル型イメージガイド11と、光源21の出射光の光行路を変更し、自己校正光21Eとしてファイババンドル型イメージガイド11に入射させる光行路変更部材15と、第1光伝搬遅延時間に対応する第1出力信号を出力する距離画像センサ23と、測定対象物33の距離画像を演算する信号処理部25とを備える。信号処理部25は、自己校正光21Eを受光した距離画像センサ23の第2出力信号に基づき、第2光伝搬遅延時間を演算し、これに基づき複数の画素ごとに距離画像を校正する。
(もっと読む)
計数装置、物理量センサ、計数方法および物理量計測方法
【課題】少ない計算量で計数誤差を補正する。
【解決手段】振動周波数計測装置は、半導体レーザ1を発振させるレーザドライバ4と、半導体レーザ1の出力を電気信号に変換するフォトダイオード2の出力に含まれる干渉波形を数える計数装置7と、計数装置7の計数結果から物体10の物理量を求める演算装置8とを有する。計数装置7は、一定の計数期間における干渉波形の周期を測定し、この測定結果から干渉波形の周期の平均値を代表値として算出し、測定した1周期を1つの信号として計数すると共に、測定した周期が代表値の(n+0.5)倍以上(n+1.5)倍未満の場合は、計数の結果にnを加算することを、計数期間中の周期の全測定結果について行う。
(もっと読む)
フォームファクタが小さいサイズセンサ
本明細書で開示される主題は、モバイル機器から遠隔の物体までの距離を測定すること、または遠隔の物体のサイズを測定することに関する。 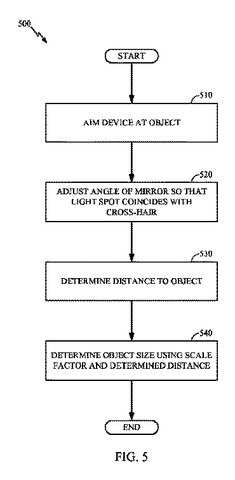 (もっと読む)
(もっと読む)
レーザ照準機構
レーザトラッカまたはレーザスキャナとともに使用するための照準デバイスは、トラッカまたはスキャナ制御システムとトラッカまたはスキャナ装置とを含むとよい。トラッカ装置は、レーザを操作する機構へトルクを印加するように構成された複数のモータと、機構の角度位置についてのフィードバック情報をトラッカ制御システムへ送るように構成された複数の角度エンコーダとを含むとよい。トラッカまたはスキャナ制御システムは、照準デバイスが手動調節モードで作動している時にトラッカまたはスキャナ制御システムが複数のモータを制御してユーザにより引き起こされた移動の方向と反対に機構へトルクを付与するように構成されるとよい。 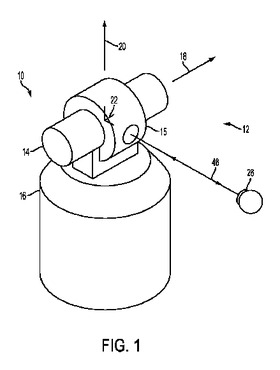 (もっと読む)
(もっと読む)
動体判別機能付き電子機器
【課題】 動体を正確に判別することができるコンパクトな電子機器を提供する。
【解決手段】 動体しきい値記憶手段104の動体しきい値を、測定対象物までの距離が遠い場合には大きく、測定対象物までの距離が近い場合には小さくなるように、測定距離範囲毎に予め設定する。動体判定手段106は、測距値の最大値と最小値の差が所定の動体しきい値よりも大きい場合に測定対象物が動体であると判定する。
(もっと読む)
物標検出装置および物標検出方法
【課題】高い認識精度と、高いリアルタイム性とを兼ね備えた物標検出装置および物標検出方法を提供する。
【解決手段】記憶部4には、対象物の認識に用いるトレーニング用および参照用の特徴量(ポジティプデータ、ネガティブデータ)として、画像中のROIの大きさを考慮して、複数の画像サイズのものが記憶されている。制御部4では、複数の参照用の特徴量のうち、特徴量の距離(サイズ)に対応した特徴量が選択された上で、マッチングが行われる。これにより、ステレオカメラ2から得られたROIの2次元画像の距離(サイズ)が、あらかじめ用意された参照用の特徴量の距離(サイズ)と大きく異なることをなくすることができる。
(もっと読む)
測距装置および測距方法
【課題】被測定物までの距離の測定結果のバラツキを抑制する。
【解決手段】測定制御部71は、複数の光出力レベルの測定光を用いて、各光出力レベル毎に被測定物までの距離の測定処理を所定の回数ずつ実行するように、測距装置1の各部を制御する。統計処理部83は、所定の回数の測定処理において、受光した光の強度を示す受光信号の所定のサンプリング周期毎の値が所定の閾値以上となる回数を各所定の時間毎にカウントすることにより得られる度数分布を、各光出力レベル毎に作成する。選択部72は、各光出力レベルに対する度数分布の中から、被測定物までの距離の演算に用いる度数分布を選択する。演算部73は、選択された度数分布を用いて、被測定物までの距離を演算する。本発明は、例えば、被測定物までの距離を測定する測距装置に適用できる。
(もっと読む)
人物動作検出装置、遊具装置、人物動作検出方法、ゲーム方法、制御プログラムおよび可読記録媒体
【課題】多数の空間領域を面状に演算処理する場合に、高いフレームレートでも演算量が膨大にならず、撮像範囲における人物動作の方向と距離の変化量を高精度に検出する。
【解決手段】TOF式距離画像センサ31からの距離情報に基づいて人物の動作情報を検出する高速人物動作検知制御手段4は、TOF式距離画像センサ31からの距離情報に基づいて時系列に複数の距離フレームを生成する距離フレーム生成部431と、少なくとも2つの距離フレームに基づいて、人物に距離変化のない距離情報である距離平衡フレーム(背景画像フレーム)を生成する距離平衡フレーム生成部432と、複数の距離フレームについてそれぞれ距離平衡フレームとのフレーム差分を演算し、フレーム差分から人物の動作情報として人物の距離の変化量と変化方向を算出するフレーム差分演算部46とを有している。
(もっと読む)
動線認識システム
【課題】監視領域が広い対象に対して有効な動線認識システムを提供する。
【解決手段】監視領域内における移動体の位置検出をマルチレーザスキャナ方式で行う。そして、このマルチレーザスキャナ方式により検出された移動体の位置を示す位置情報を、当該位置に移動体が居た時刻を示す時刻情報とともに監視領域移動体情報としてレーザ動線データベース27に記録する。一方、監視領域内の一部である特定領域内における移動体の位置を、マルチレーザスキャナ方式よりも位置検出の精度が高いカメラ画像方式で行う。そして、このカメラ画像方式により検出された移動体の位置を示す位置情報を、当該位置に移動体が居た時刻を示す時刻情報とともに特定領域移動体情報としてカメラ動線データベース28に記録する。
(もっと読む)
周囲を光学的に走査および測定する装置
レーザスキャナ10として設計される、周囲を光学的に走査および測定する装置であって、走査に対してレーザスキャナ10の静止基準系を規定する中心C10およびこの走査の中心Ciと、発光ビーム18を放射する発光器17と、レーザスキャナ10の周囲の空間内で物体Oによって反射され、または他の形で散乱された受光ビーム20を受け取る受光器21と、走査の多数の測定点Xに対して、少なくとも中心Ciと物体Oの間の距離dを判定する制御および評価ユニット22とを有し、異なる中心C1、C2、...を有するいくつかの走査で周辺空間を測定するレーザスキャナ10が、中心C1、C2、...間を全体として動くことができるデバイスにおいて、異なる中心C1、C2、...間で全体としてレーザスキャナがたどる経路を位置合わせする光学デバイスとして、スキャナマウス30が提供され、スキャナマウス30は、レーザスキャナ10に配置され、基準表面Gに対するレーザスキャナ全体の動きを光学的に測定する。  (もっと読む)
(もっと読む)
光測距装置
【課題】人間の眼の保護を図りながら、測距動作を継続できる光測距装置を提供する。
【解決手段】測距モードとして、安全モードと高精度モードとを備える。前記安全モードは、被曝放出レベルが最大許容露光レベルMPEよりも小さくなる「レーザ製品の安全基準」(JIS C 6802)のクラス1に相当するモードである。一方、高精度モードは、安全モードに比べてレーザ投光頻度を上げたり、走査振幅を絞ったりするなどの設定により、被曝放出レベルが最大許容露光レベルより高い、安全基準のクラス3Rに相当するモードである。ここで、測距動作で得た距離のデータと反射光量のデータとから、至近距離に人間の眼が存在することが検出された場合、高精度モードによるレーザ放射を停止させ、安全モードでレーザ放射を行わせる。
(もっと読む)
121 - 140 / 352
[ Back to top ]