
Fターム[5J084DA07]の内容
光レーダ方式及びその細部 (24,468) | 図面 (2,209) | 送受信部の配置又は設置の構成図 (450)
Fターム[5J084DA07]に分類される特許
201 - 220 / 450
車両渋滞検出装置
【課題】車両の渋滞の末尾位置を精度良く検出することが可能であり、光量の少ない環境でも渋滞を検出することが可能であり、さらに従来よりも短い時間毎の渋滞を検出することが出来る車両渋滞検出装置を提供することを目的とする。
【解決手段】車両渋滞検出装置が、所定の領域を走査するレーザレーダセンサと、レーザレーダセンサの検出結果に基づく距離情報と、レーザレーダセンサの走査方向の情報とからレーダ情報を生成し、レーダ情報から所定の領域内に存在する車両を検出し、進行方向側の車両から進行方向逆側の車両までを順番に渋滞車両であるか否か判定し、車両が渋滞車両であると判定した場合に当該車両の位置を渋滞末尾位置として指定することによって進行方向逆側末尾の渋滞車両の位置を渋滞末尾位置として最終的に指定する制御部を具備する。
(もっと読む)
レーザ距離測定装置

【課題】検出エリアを設定する際の複雑なデータ入力作業等を極力省略するができ、検出エリアをより簡易に設定可能なレーザ距離測定装置を提供する。
【解決手段】レーザ距離測定装置1は、装置本体2と、この装置本体2とは別体として構成された基準物体80とを備えている。基準物体80は、レーザ光が入射したときに特定反射光を発する構成をなしており、装置本体2側では、レーザ光の走査エリア上に基準物体80が配置されたときに、検出される反射光が、特定反射光であるか否かを判断している。そして、特定反射光であると判断されたときには、当該特定反射光の元となるパルスレーザ光の発生から、当該特定反射光が検出されるまでの時間を検出し、その検出時間に基づいて基準物体までの距離を算出している。そして、その算出された距離に基づき、走査エリアの一部を検出エリアとして設定している。
(もっと読む)
距離測定装置
【課題】発振器の周波数にゆらぎが生じても、ビートダウンした処理信号間の位相差から距離を測定する。
【解決手段】距離測定装置は、レーザ光束として光周波数コムを発生するレーザ装置1と、基準光27を受光する基準受光部3と、測距光28を受光する測定受光部6とを備える。第1ミキサ31および第2ミキサ32は、測定受光部6および基準受光部3の受光信号と特定の周波数を持つ発振器50の周期信号とを乗算する。第4フィルタ51および第5フィルタ52は、第1ミキサ31および第2ミキサ32で生成された信号成分から異なる周波数成分を抜き出す。第4フィルタ51および第5フィルタ52で抜き出された信号は、第3ミキサで乗算され、差の周波数成分が第6フィルタ54で抜き出される。位相差測定部12は、第6フィルタ54および第2フィルタ11からの2つの処理信号の位相差を測定し、距離測定部17は、その位相差から距離を測定する。
(もっと読む)
歩行者検出装置
【課題】的確に歩行者を検出する歩行者検出装置を提供する。
【解決手段】3次元位置情報取得部11は、車両の周辺の3次元位置情報を時系列順に取得する。解析部12は、各時刻における前記3次元位置情報を車両が位置する平面上の点群として表現し、時系列に沿ってその点群の分布変化の周期性を解析する。解析部12により周期性があると判定された際には、その点群を歩行者として検出する。
(もっと読む)
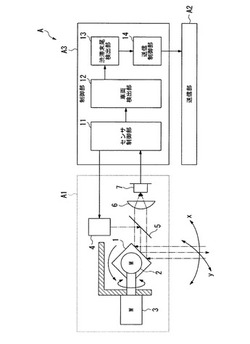
物体検知装置
【課題】被検知物の存在、方向、または距離だけでなく、形状や大きさをも検知することができる超小型物体検知装置を提供する。
【解決手段】物体検知装置1は、発光素子3と、これから照射された光を線状光に変換する回折光学素子4とを回転させる回転駆動手段と、前記線状光をその線方向と直交する方向に走査することによって形成される検知領域にある被検知物から反射された反射光を受けて反射光のパターンを生成する撮像素子5と、前記撮像素子により生成された前記反射光のパターンから前記被検知物の存在、その方向、形状又は大きさを検知する検知回路6とを備える。
(もっと読む)
レーザ味方識別システム
【課題】本発明の課題は、複雑な交戦状況下において隊員が目視にて瞬時に味方部隊を識別することができ、味方部隊に対する誤射を未然に防止するためのレーザ味方識別システムを提供することにある。
【解決手段】本発明は、銃12に装着され、レーザパルス列によるコード情報を含むIFFレーザビームが発射されるIFFレーザ送信装置13と、IFFレーザ送信装置13からのIFFレーザビームが受光され、レーザパルス列によるコード情報を解読して発光器を所定時間発光する味方識別器18とを具備することを特徴とする。
(もっと読む)
三次元情報検出装置及び三次元情報検出方法
【課題】本発明は、高速に動く測定対象物に対しても、カメラから測定対象物までの距離を高精度な画像としてリアルタイムに検出する三次元情報検出装置及び三次元情報検出方法を提供することを目的とする。
【解決手段】強度変調光11を測定対象物200に照射する光源10と、
前記強度変調光の反射光12を受光し、該反射光の1周期の変調波に対して、又は所定の複数周期の変調波に対して、異なるタイミングでゲートを開放することにより撮像タイミングの異なる複数の画像61、62を取得する複数のゲート撮像素子41、42と、
前記複数の画像から、前記測定対象物の距離画像を算出する演算処理装置70と、を含むことを特徴とする。
(もっと読む)
目標検出装置及び目標検出方法
【課題】目標検出精度を向上させることができる目標検出装置を得る。
【解決手段】赤外線カメラ8の画像データを温度領域毎に分割し、レーザ測距器9の距離から各温度領域の角度と距離を求める画像処理器10と、互いに直交する偏波特性を有する二つのアンテナ1、2のうち、送信ではいずれか一方、受信では双方を駆動させ、観測対象のレーダ信号を収集する偏波切替器3と、レーダ信号を分解能セル毎に散乱ベクトルとして格納する観測散乱ベクトル蓄積器7と、求めた温度領域毎の角度と距離を用いて、対応する散乱ベクトルの分解能セルを抽出し、散乱ベクトルを温度領域毎に分割するレーダ信号分割器11と、温度領域毎に分割された散乱ベクトルからフィルタの生成を行い、フィルタを温度領域内の各分解能セルに適用処理を行い、温度領域毎に電力を出力するノッチフィルタ回路12と、電力を閾値と比較して目標とクラッタの判別を行う閾値回路13とを設けた。
(もっと読む)
物理量センサおよび物理量計測方法
【課題】物体の変位や速度を高い分解能で計測し、計測に要する時間を短縮する。
【解決手段】物理量センサは、物体10にレーザ光を放射する半導体レーザ1と、半導体レーザ1を動作させるレーザドライバ4と、半導体レーザ1から放射されたレーザ光と物体10からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出するフォトダイオード2および電流−電圧変換増幅部5と、電流−電圧変換増幅部5の出力信号に含まれる干渉波形の周期を計測する信号抽出部7と、信号抽出部7で計測された干渉波形の周期を、その直前と直後のうち少なくとも一方において計測された干渉波形の周期の移動平均値と比較することにより、干渉波形の周期を補正し、補正した個々の周期に基づいて物体10の変位と速度のうち少なくとも一方を算出する演算部8とを備える。
(もっと読む)
距離測定装置および距離測定方法
【課題】コンパクトで、殊に手に持つ形式の距離測定用測定装置によって、使用可能な距離領域、すなわちこの装置による距離測定が可能な距離領域を容易な手段で拡張すること。
【解決手段】送出部と、受信部と、目標対象物までの装置の距離を求める制御および評価ユニットを有している形式のものにおいて、距離測定装置は、ユーザまたは距離測定装置によって設定された測定時間で行われた距離測定の信号ノイズ比の実際値と、ユーザまたは距離測定装置によって設定された距離測定精度から計算された信号ノイズ比の目標値とを比較する手段を有しており、実際値が目標値から偏差している場合には、目標値を得るのに必要な周期数が求められ、周期数を越えて距離測定を行う、または設定された距離測定精度の値を、設定された測定時間内での距離測定が可能になるまで徐々に低くする手段を有している距離測定装置。
(もっと読む)
距離測定装置及び距離測定方法
【課題】測定装置内部の遅延回路の変動を相殺し、高精度でかつ高速測定が可能な距離測定装置及び方法を実現する。
【解決手段】パルス的に発光する光源部10から、第1基準光r1、第2基準光r2、測定送信光mtを分岐し、光学的変化が略生じない第1参照光路R1を伝播させた第1基準光r1、光学的遅延発生部50が挿入された第2参照光路を伝播した第2基準光r2、測定送信光を測定対象物160に照射して反射して戻ってきた測定受信光mr間の検出時間差を測定することによって測定対象物160との距離を測定する装置及び方法であって、測定受信光mrと第1基準光r1が時間的に分離している場合は、両者の検出時間差から距離を算出し、測定受信光mrと第1基準光r1が時間的に分離していない場合は、第1基準光r1と第2基準光r2の検出時間差Tdと、測定受信光mrと第2基準光r2の検出時間差Td’から距離Lを算出する。
(もっと読む)
車両ドア開度制御装置
【課題】スイングドアに対して用いることができ、ユーザに痛みを感じさせず、且つ、指など、ドアに挟まれる可能性がある部分が人体の極一部であっても挟み込みを防止することができる車両ドア開度制御装置を提供する。
【解決手段】車両ドア(スイングドア)30のドアミラー32の下部に設けたレーザセンサ9により、車両ドア30の表面に対し、車両ドア30が開扉される方向に所定角度ずれた走査平面を走査するようにレーザ光を送光するとともに、物体によって反射された反射光を受光する。このレーザセンサ9によるレーザ光の送光・受光結果に基づいて、人検出範囲40に物体が存在するか否かを判断するし、人検出範囲40に物体の存在が検知されたことに基づいて、車両ドア30の半ドア状態から全閉状態への閉め込みを禁止する。
(もっと読む)
レーダ装置
【課題】よりS/N比のよいレーダ装置を提供する。
【解決手段】所定の照射角度範囲にレーザ光を順次照射する送信部10と、レーザ光が物体に反射した反射光を受光するために複数の受光素子が配列されている受光素子アレイ34と、反射光を受光素子アレイに集光させる受光レンズ32と、受光素子アレイ34を構成する複数の受光素子のうち、送信部10から照射されるレーザ光の照射角度に対応した受光素子を検出可能状態とする演算部60とを備え、受光素子アレイ34の受光信号に基づいて物体検出を行うレーダ装置1であって、受光レンズ32として、光軸が互いに異なる2つの受光レンズ32A、32Bを備える。
(もっと読む)
高解像度三次元撮像のシステムおよび方法
本発明の実施形態は、広い視野および精密なタイミングを用いた三次元撮像のためのシステムおよび方法を提供する。一側面によれば、三次元撮像システムは、広い視野を有する現場を照射するのに十分な発散で光パルスを放出するように構成される、照射サブシステムを含む。センササブシステムは、場面によって反射または散乱された光パルスの部分を広い視野にわたって受容するように構成され、時間の関数として、受容された光パルス部分の強度を変調し、変調された受容された光パルス部分を形成するように構成される、変調器と、受容された光パルス部分に対応する第一の画像、および変調された受容された光パルス部分に対応する第二の画像を生成するための手段とを含む。プロセッササブシステムは、第一および第二の画像に基づいて、三次元画像を取得するように構成される。  (もっと読む)
(もっと読む)
移動体検知装置および移動体検知方法
【課題】より正確に移動体の判定を行うこと。
【解決手段】移動ロボット100であって、移動ロボット100の第1の位置、および第1の位置から移動後の第2の位置のそれぞれにおいて、障害物の位置を検知するLRS101と、第1の位置および第2の位置のそれぞれにおいて、移動ロボット100の現在位置を取得する現在位置取得部109と、第1の位置および第2の位置のそれぞれにおいて、障害物の位置と移動ロボット100の現在位置とに基づいて死角領域を認識する死角領域認識部110と、第2の位置において認識された死角領域に基づいて、第1の位置において検知された障害物の位置から第1計測位置を選択し、第1の位置において認識された死角領域に基づいて、第2の位置において検知された障害物の位置から第2計測位置を選択する計測点選択部111と、第1計測位置と第2計測位置とに基づいて、障害物が移動体であるか否かを判定する移動体判定部115とを備えた。
(もっと読む)
物体検出装置および情報取得装置
【課題】目標領域に投射された光を適正に受光でき、よって、目標領域の情報を精度よく取得できる情報取得装置およびこれを搭載する物体検出装置を提供する。
【解決手段】情報取得装置1は、所定波長帯域の光を出射するレーザ光源11と、レーザ光源11からの光を目標領域に向けて投射する投射レンズ12と、目標領域から反射された反射光を受光して信号を出力するCMOSイメージセンサ16と、反射光をCMOSイメージセンサ16へと導く撮像レンズ14と、レーザ光源11からの光を透過させるためのフィルタ15を具備し、さらに、フィルタ15を傾けるアクチュエータ50を有する。フィルタ制御回路26は、透過波長帯域がレーザ光源11からの光の波長帯域に近づくよう、フィルタ15を傾ける。
(もっと読む)
光センサ
【課題】本来の検知対象を後方の鉢や扉その他のものから正確に判別することができ、精度高く検知対象を検知することのできる光センサを提供する。
【解決手段】発光部36から検知対象に向けて発した光の検知対象からの反射光を受光部42で受光し、発光部36と受光部42の並びの方向をX方向として、反射光の検知対象からの反射角度に応じて変化する受光素子38上のX方向の受光位置を検出することによって検知対象の位置の検知を行う光センサ20において、発光素子32の発光方向の前方に、発光素子32からの光をX方向に絞り、X方向への光の拡がりを制限するスリット孔68を配置し、スリット孔68を透過した光を前方に配置した集光レンズ34を通して平行光として前方に照射するようになす。
(もっと読む)
レーザーによる測距方法
【課題】
従来のレーザーを用いた距離測定方法は、出射したレーザー光が被測定物で反射して戻って来る迄の時間を計って測距するものである。そのため測距精度はレーザー光の波長には遠く及ばない。また、レーザー光の特徴である可干渉性を利用した測定方法では、距離の変化量は波長程度の誤差で測定できるが、距離は分らない。
【解決手段】
本発明はレーザーの特徴である可干渉性を利用し、測距精度を波長程度、あるいは位相を考慮する事により波長以下にまで高めるものであり、その方法は発振波長の異なる2つ以上のレーザー光を用い、それぞれを参照光と測定光に分け、参照光と測距物から反射して来た測定光を干渉させ、参照光或いは測定光の伝播距離を変化させる事により光路差を変えていくとそれぞれのレーザー光はそれぞれの周期で干渉による明暗をつくるので重ね合わせた明暗の間隔を測ることによって測距物までの距離を知るものである。
(もっと読む)
画像取得装置及び方法
【課題】対象物との距離に依存しない対象物の画像を取得することが可能な画像取得装置及び方法を提供する。
【解決手段】投光部20は、投光期間に対象物Oへパルス光を繰り返し照射し、投光休止期間に対象物Oへのパルス光の照射を休止して、各アバランシェフォトダイオード332の周辺回路333aは、投光休止期間に対象物Oから受光した光の強度を求め、投光部20がパルス光を照射した時刻と反射パルス光を受光した時刻との時間差に基づいて対象物Oまでの距離を算出するための読み出し回路に接続されている。これにより、各アバランシェフォトダイオード332は、投光休止期間において受光する光の強度に投光部20が照射したパルス光の反射光L2の成分が含まれないことになり、対象物Oとの距離に依存しない対象物Oの画像を取得することが可能となる。
(もっと読む)
光波距離測定装置
【課題】広がり角の低下を招くことなく、反射光の取得のための集光光学部材を小さくすることができるとともにその集光光学部材のNAを小さくすることを容易なものとし、全体の小型化を容易なものとすることができる光波距離測定装置を提供する。
【解決手段】光源15からの出射光Eを目標物へ向けて出射するとともに目標物からの反射光Rを受光部22で受光して距離測定を行う光波距離測定装置10である。出射光Eで対物レンズ26を介して目標物を照射する出射光学系と、反射光Rを対物レンズ26を介して受光部22へと導く受光光学系とを備え、受光光学系または出射光学系には、その光路上に、透過偏角を生じさせることなく光束の断面形状を変更するコーンプリズム34が設けられている。
(もっと読む)
201 - 220 / 450
[ Back to top ]