
Fターム[5J084DA07]の内容
光レーダ方式及びその細部 (24,468) | 図面 (2,209) | 送受信部の配置又は設置の構成図 (450)
Fターム[5J084DA07]に分類される特許
141 - 160 / 450
信号処理装置、及び走査式測距装置
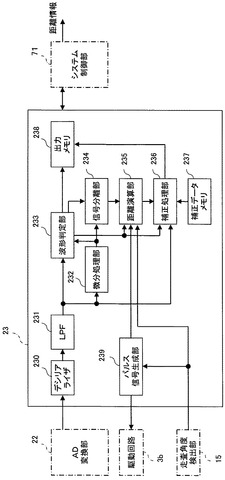
【課題】走査式測距装置と被測定物との間に障害物が存在する場合であっても、被測定物に対する距離を正確に算出可能な走査式測距装置を提供する。
【解決手段】
走査部で周期的に偏向走査されたパルス状の測定光に対応して、受光部で検出された被測定物からの反射光に対応する反射信号を微分する微分処理部と、一次微分された一次微分反射信号の立上り時期を基準に当該一次微分反射信号の重心位置を算出し、当該重心位置に対応する時期を反射光の検出時期として求め、測定光の出力時期と当該反射光の検出時期との時間差に基づいて被測定物までの距離を算出して出力する演算部と、微分処理部により反射信号が一次微分された一次微分反射信号の立上り及び立下り特性と、反射信号が二次微分された二次微分反射信号の立上り特性に基づいて、反射光が複数の被測定物からの反射光が重畳した反射光であるか否かを判定する波形判定部を備えている。
(もっと読む)
検知装置

【課題】車両側方の道路の区画線を、道路の継目等を通過した場合においても検知可能な、ロバスト性に優れた検知装置を提供する。
【解決手段】車両が現在、道路の継目位置を通過中であるか否かを判定し、継目位置を通過中であるか否かで方法を変えて道路の区画線を検知する。特に継目位置通過中の場合は、車両側方に複数の走査線からなる検知波を照射し、路面からの反射波において全ての走査線の反射強度の積を算出して、区画線部分とそれ以外の領域での反射強度の差を大きくして、区画線位置を検知する。
(もっと読む)
光レーダ装置
【課題】構造を複雑化させることなく、回転駆動されるポリゴンミラーの回転中心軸方向における所望の角度でレーザ光を照射させることが可能な光レーダ装置を提供する。
【解決手段】ポリゴンミラー42を設置している設置プレート46の傾き角度を変化させる角度調整機構52、及びポリゴンミラー42を回転駆動するモータ44から角度調整機構52への駆動力の伝達、非伝達を切り替えるクラッチ機構50を設けた。これにより、設置プレート46の傾き角度を変化させるための専用の駆動源を設けることなく、設置プレートの傾き角度を変化させることができ、それにより、垂直方向における検出エリアの位置を調整することができる。
(もっと読む)
目標追跡装置
【課題】安定して反射体を検出することができる目標追跡装置を提供すること。
【解決手段】複数の出射パルスが一定の間隔で出射されるパルスレーザ装置12および出射パルスの波長域に感度を有する撮像装置13が、これらの各指向方向を一致させて備えるとともに、撮像装置13によって得られる画像情報に基づいて生成された指向制御信号に応じて、パルスレーザ装置12および撮像装置13を適宜指向させる指向装置11を具備する目標追跡装置であって、撮像装置13に入射される反射パルスのうち、画像情報から反射体を抽出可能な強度の反射パルスのみを撮像するように撮像装置13を制御する感光タイミング制御部18を具備する。
(もっと読む)
距離測定装置及び飛翔体位置測定装置
【課題】 鳥類等の飛翔体までの距離及び位置を簡易に測定する。
【解決手段】 レーザー距離計10の接眼レンズ11にリレーレンズ20を介してビデオカメラ30を装着した構成であり、レーザー距離計10の接眼レンズ11に表示される飛翔体の画像をビデオカメラ30のモニタ画面31に表示させることができる。従って、観測者は、レーザー距離計10の接眼レンズ11をのぞき込み、アイポイント位置を保ちながらレーザーを照射する必要はなく、ビデオカメラ30のモニタ画面31を見ながら、レーザー距離計10を操作して飛翔体を追尾でき、飛翔体を追尾しながらのレーザー照射作業が容易となる。
(もっと読む)
物理情報取得装置、固体撮像装置、物理情報取得方法
【課題】別光源から発せられた光に由来する情報を取得する際に、通常光源に起因する外乱ノイズの影響を緩和する。
【解決手段】電磁波エネルギレベルが他の波長よりも低い特定波長と対応した波長の特定波長波を物体に照射し、物体で反射した特定波長波を固体撮像素子314で検知し、得られた検知情報に基づき特定波長波に由来する情報を取得する。特定波長を中心とする狭帯域のバンドパス特性を持つ光学バンドパスフィルタ502を撮像光学経路上に配置する。特定波長波の物体反射光を検知すれば特定波長成分が通常光源の成分に埋もれずに検知される。特定波長波を物体に照射したときとしないときの各検知情報を比較して通常光源に起因する外乱ノイズの影響が緩和された特定波長波に由来する情報を取得する。光学バンドパスフィルタ502を併用すれば、特定波長成分だけを検知でき、通常光源の光量が強い場合でもその影響を受けず、飽和の問題を回避できる。
(もっと読む)
計測車両、道路地物計測システム
【課題】移動体にレーザレーダを搭載して地面や壁面に照射し、移動しながら目標物の位置を計測しようとする場合、複数のレーザレーダを用いることは多いが、レーザレーダを単に平行に並べて設置すると、移動速度によって計測点の密度にムラが発生したり、走行に平行な方向と垂直な方向とで計測点の密度差が大きい、という問題があった。
【解決手段】レーザレーダ同士に角度を持たせて設置することにより、計測点の密度のムラや方向による密度差の大きさを軽減することができる。
(もっと読む)
水中距離測定用レーザー送受信システム、レーザースティック及び水中における距離測定方法
【課題】地球上のダイナミックな海底の挙動を測定する水中距離測定用レーザー送受信システムと、レーザースティックと、水中における距離測定方法とを提供する。
【解決手段】少なくとも二以上の送受信装置10を海底に間隔をあけて設置する。一つの送受信装置10が、海水を介して他の送受信装置10に対してレーザー光を照射する送信手段11と、他の送受信装置10から照射されたレーザー光を受信する受信手段12と、送信手段11におけるレーザー光の送信方向、受信手段12におけるレーザー光の受信方向の何れか一方又は双方を制御する制御手段13と、送信手段11、受信手段12の何れか又は双方を用いて他の送受信装置10とレーザー光を送受信して他の送受信装置10との距離を測定する距離測定手段14と、距離測定手段14により収集したデータを格納するデータ格納手段15と、を備える。
(もっと読む)
時間計測装置およびセンサ装置
【課題】計測時間の計測精度の低下を抑制し得る時間計測装置およびセンサ装置を提供する。
【解決手段】レーザレーダ装置1に採用される制御回路70の時間計測回路71では、計測時間Tが、デジタル値D1およびデジタル値D2の比率と基準時間Toとに基づいて求められる。さらに、比率演算時の時間分解能Tr1が、比率演算時の演算誤差e1に等しくなるように設定されて、リング遅延パルス発生回路81の遅延素子(ゲートディレイ)の時間分解能よりも細かく設定される。
(もっと読む)
異物検出装置
【課題】同一捜索時間における異物の3次元形状の検出精度を向上できる異物検出装置を得る。
【解決手段】捜索対象にレーザ光を照射したときの散乱光を用いて異物を検出する異物検出装置であって、レーザ光を出力する光出力手段と、レーザ光を用いて捜索対象の捜索範囲を走査するスキャナ11と、捜索対象からの散乱光を受光する光受信機13と、レーザ光と散乱光の位相差及び散乱光の受信強度を検出する位相検波器14と、これらの検出結果に基づいて捜索範囲を絞り込んで着目領域23を抽出し、スキャンする走査線間隔を狭くしてスキャナ11に着目領域23を再走査させる制御信号を出力し、この着目領域23における位相検波器14の検出結果に基づいて3次元画像を生成するパソコン3とを備える。
(もっと読む)
異物検出装置
【課題】ターゲットに照射して戻ってくる散乱光の偏波成分によらず異物の3次元形状を高精度に検出できる異物検出装置を得る。
【解決手段】連続波信号で変調されたレーザ光を出力する光源6と、レーザ光を用いてターゲットの捜索範囲を走査するスキャナ10と、ターゲット表面で散乱される散乱光を偏波成分ごとに分離する偏波ビームスプリッタ12と、散乱光の各偏波成分をそれぞれ受光する受信レンズ13a、13b、及び光受信機14a、14bで構成される受光手段と、レーザ光と散乱光の各偏波成分との位相差及び散乱光の各偏波成分の受信強度を検出する位相検波器15a、15bと、これらの検出結果に基づいて散乱光の偏波解消度を算出すると共に、偏波解消度の算出結果に応じて異物との離間距離を算出し異物の3次元形状を出力するパソコン3と、を備えたものである。
(もっと読む)
レーザセンサ装置
【課題】簡単な構成で、装置の姿勢変化を検出できるようにする。
【解決手段】装置本体ケース2には、侵入検出用レーザ照射口11の反対側にレーザ通過口12が形成されている。建物の壁14におけるレーザ通過口12と対向する部位には姿勢変化検出用シール3が装着される。レーザ照射部5から照射されたレーザ光は、回転ミラーで展開され、レーザ通過口12を通してシール3をスキャンしてレーザ受光部6により受光される。制御装置10は、レーザ通過口12を通して戻ってくるレーザ光がレーザ受光部6で受光されると、このレーザ受光パターンを当該展開周回とこれ以前での展開周回とで比較し、同じであれば姿勢変化無しと判断し、異なれば姿勢変化有りと判断する。
(もっと読む)
無人搬送車
【課題】光軸調整を容易に行うこと。
【解決手段】複数の反射部17a〜17eを左右方向に段状に配置してなる検査用の反射板17に対して発光させる。そして、反射光を受光することにより、何れの反射部17a〜17eからの反射光であるかを特定する。そして、その結果を、発光部の光軸を調整するための指標となる光軸調整情報として表示部16aに表示させる。表示部16aには、反射した反射部17a〜17eに対応するシンボルHa〜Heが点灯した状態で表示されるので、その表示内容から光軸調整の有無及び調整量を認識できる。
(もっと読む)
地表面観察方法
【課題】レーザによる計測のみで土地被覆を判断し、さらに、必要に応じて、土地表面形状を求めることのできる地表面観察方法の提供を目的とする。
【解決手段】飛行体1から地上への多波長のレーザ掃引によって地上から反射した異なる波長成分を有する適数の反射パルスを判定単位として、各判定単位における波長-反射強度分布を基準に判定単位群を適数に分類し、
各判定単位に物性に関連付けられた狭域属性2を付与して土地被覆状態を観察する。
(もっと読む)
物体検出装置および情報取得装置
【課題】簡素な構成にて目標領域の情報を精度よく取得できる情報取得装置およびこれを搭載する物体検出装置を提供する。
【解決手段】情報取得装置1は、波長830nm程度のレーザ光を出射するレーザ光源111と、レーザ光を前記目標領域に向けて投射する投射光学系10と、前記目標領域からの反射光を受光して信号を出力するCMOSイメージセンサ125とを有する。レーザ光が出射されたときにCMOSイメージセンサ125から出力される第1の撮像データから、レーザ光が出射されていないときにCMOSイメージセンサ125から出力される第2の撮像データが減算され、減算結果が、メモリ25に記憶される。3次元距離演算部21cは、メモリ25に記憶された減算結果に基づいて、3次元距離情報を演算し取得する。
(もっと読む)
物体識別方法及び物体識別装置
【課題】反射物体が存在する場所においても、物体の誤認識を抑制することができる物体識別方法及び物体識別装置を提供する。
【解決手段】物体識別装置1は、車両前方の物体にレーザ光を照射し物体からのレーザ光の反射状態によって物体との距離を測定するレーザ装置3と、少なくとも上記レーザ光の波長帯域の光を受光させるフィルタ部5aを備えたカメラ5と、レーザ装置3で対象物との距離を測定すると共に、レーザ装置3のレーザ光の照射方向に撮像方向を略一致させてカメラ5で撮像を行い、カメラ5がレーザ光の照射軌跡を認識した場合には、レーザ装置3で測定された対象物との距離値を無効にする。
(もっと読む)
距離情報抽出方法及び該方法を採用した光学装置
【課題】距離情報抽出方法及び該方法を採用した光学装置を提供する。
【解決手段】数学的に理想的な波形ではない実際の非線形的波形を考慮し、光学装置と被写体との間の距離を決定する方法及び装置が開示され、該方法と装置は、被写体に投射された波形の類型の制限を受けることなく正確な距離情報を抽出でき、歪曲及び非線形性がほとんどない高価の光源や光変調素子を使用する必要がなく、複雑な誤差補償手段が要求されない。また、既存の光源、光変調素子及び光学装置をそのまま利用でき、追加コストがかからない。さらに、あらかじめ計算された距離情報が保存されているルックアップテーブルを使用するために、距離情報を抽出するにおいて演算量が非常に小さいので、リアルタイム距離情報映像の撮影が可能である。
(もっと読む)
対象物検出装置及びプログラム
【課題】計算コストを削減して対象物を早期に検出する。
【解決手段】障害物推定部22で、レーザレーダ12の観測データ、及び車両センサ14の検出値に基づいて、障害物を検出すると共に、障害物の種類を推定し、死角領域推定部24で、障害物により形成される死角領域の位置、大きさ、及び死角領域境界線の長さを推定する。対象物推定部26で、死角領域推定部24の推定結果に基づいて、死角領域から出現する可能性のある対象物の種類を推定し、探索範囲設定部28で、死角領域の位置に基づいて、対象物の探索範囲を設定する。優先度設定部30では、探索範囲に優先度を設定する。探索条件設定部32で、死角領域推定部24の推定結果、及び自車両から探索範囲までの距離に基づいて、探索条件を設定し、対象物識別部36で、識別モデル記憶部34から対象物の種類に応じた識別モデルを読み出し、撮影画像の探索範囲から抽出されたウインドウ画像と照合する。
(もっと読む)
レーザセンサ及びこれを用いた検出対象判定方法
【課題】レーザセンサを用いて検出対象を追従して検出しているときに検出対象が突然消えたりして、その後以降の走査周期にて突然現れたりしても、これらが関連する検出対象であることを確実に判定することができるレーザセンサ及びこれを用いた検出対象判定方法を提供する。
【解決手段】レーザ光出射部2と、反射レーザ光に対応した受光情報を出力する受光部3と、受光情報を走査周期ごとに記憶する記憶部5と、受光情報に基づき、前回の走査周期で検出された検出対象が今回の走査周期で検出されているか否かを判別する判別部12と、判別部12の判別結果が否の場合に、検出対象を消失した検出対象として一時的に記憶する一時消失データベース11と、受光部3から受け取った次回以降の受光情報に新たな検出対象が存在する場合に、新たな検出対象が消失した検出対象と同一であるか否かを判定条件に基づいて判定するための判定部とを備えている。
(もっと読む)
窓検出装置及び車種判別装置及び窓検出方法及び車種判別方法
【課題】車両の窓を検出し、その検出結果に基づいて、車両の車種を判別する。
【解決手段】放射部111は、車両に対して放射光751を放射する。受光部115は、放射光751が車両に当たって反射した反射光754を受光する。反射位置算出部122は、放射部111が放射光751を放射してから受光部115が反射光754を受光するまでの時間に基づいて、放射光751が車両850に当たって反射した反射位置を算出する。窓検出部130は、反射位置算出部122が算出した反射位置に基づいて、車両の窓の位置を検出する。
(もっと読む)
141 - 160 / 450
[ Back to top ]