
Fターム[5J084DA07]の内容
光レーダ方式及びその細部 (24,468) | 図面 (2,209) | 送受信部の配置又は設置の構成図 (450)
Fターム[5J084DA07]に分類される特許
161 - 180 / 450
距離画像生成装置および距離画像生成方法

【課題】撮影対象空間内の対象物に応じて、効率よく高い品質の距離画像を得る。
【解決手段】光電変換素子で受光した受光量に応じた電荷量から各画素の強度値を算出し、強度が所定以下の画素についてのみ補正を行う。補正は、同一画素の電荷量を時間方向に過去に遡り加算することにより行う。加算は、加算後の電荷量から算出した強度値が所定以上となるまで行う。そして、補正後の電荷量から、距離値を算出し、距離画像を生成する。
(もっと読む)
物体検出装置および情報取得装置

【課題】簡素な構成にて目標領域の情報を精度よく取得できる情報取得装置およびこれを搭載する物体検出装置を提供する。
【解決手段】情報取得装置1は、波長800nm程度の光を出射するレーザ光源11と、レーザ光源11の温度を調節する温調素子12と、レーザ光源11の温度を検出する温度センサ13と、目標領域から反射された反射光を透過させるためのフィルタ211と、フィルタ211を透過した反射光を受光して信号を出力するCMOSイメージセンサ23と、反射光に対するフィルタ211の傾き角を変化させるフィルタ駆動部200とを備える。CPU31は、温調素子12により設定可能な前記レーザ光源11の温度範囲内で、CMOSイメージセンサ23の受光量が最大となるよう温調素子12およびフィルタ駆動部200を制御する。
(もっと読む)
移動体検出方法及びレーザ距離測定装置
【課題】横断歩道を一団で移動する複数の歩行者の個々の動きを認識でき、横断歩道での歩行者の流れや通行量を把握できる移動体検出方法及びレーザ距離測定装置を提供する。
【解決手段】レーザ光LTを投光する投光部1と、レーザ光LTを走査する走査部と、測定範囲内の歩行者で反射して戻った反射レーザ光LRを受ける受光部2と、受光部2からの受光信号Srにより歩行者の計測データDを作成して発信する信号処理部3と、計測データDを受信して測定結果を出力する制御部6を備え、信号処理部3では、連続して取得する歩行者の計測データDを距離条件でグループ化する処理と、計測データDを複数の高さの閾値で選別する処理と、高さの閾値による高さデータに基づいて歩行者を認識する処理と、歩行者を認識する毎にそれ以前に認識した歩行者との同一性を判定する処理を行う。
(もっと読む)
歩行者安全対応器
【課題】 歩行者と、前方又は後方から歩行者に接近してくる自転車との間の距離を定期的に測定し、自転車と歩行者との距離が予め定めた距離内に入ったとき、歩行者に警報を発して歩行者の傷害事故を防ぐことを可能とする機器を提供するものである。
【解決手段】 本発明の歩行者安全対応器は、赤外線発信器と赤外線受信器により歩行者とこの歩行者に接近してくる自転車との距離を定期的に検知し、その距離dが予め定めた許容距離Dよりも小さな値となったとき、警報機構が作動して音あるいは点滅光を発し、歩行者に注意喚起を行うことを可能としたものである。
(もっと読む)
環境を光学的に走査し測定する装置
レーザスキャナ(10)として構成された、環境を光学的に走査し測定する装置であって、回転鏡(16)によって発光光線(18)を放出する発光素子(17)と、回転鏡(16)および光軸(A)を有する受光レンズ(30)を通過した後にレーザスキャナ(10)の環境内の物体(O)から反射されるかあるいはその他の形で散乱した受光光線(20)を受け取る受光素子(21)と、レーザスキャナ(10)の環境のカラー画像を撮影するカラーカメラ(23)と、多数の測定点(X)について、物体(O)までの距離を求め、この距離をカラー画像と連係させる制御評価ユニット(22)とを含む装置において、カラーカメラ(23)は、受光レンズ(30)の光軸(A)上に配置される。 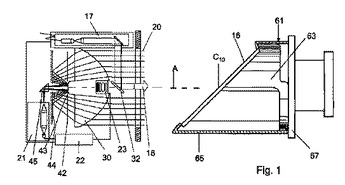 (もっと読む)
(もっと読む)
自律移動装置及びその制御方法
【課題】自己位置推定機能と足元の障害物検出機能とを良好に両立させること。
【解決手段】非接触式の距離センサ17と、移動状況に関する所定の条件に基づいて、足元の障害物検出処理か自己位置推定処理のいずれの処理を実行するか判定する判定部58と、足元の障害物検出処理を実行する場合に、距離センサ17からの測定信号の方向を足元付近に向けて変化させ、自己位置推定処理を実行する場合に、測定信号の方向を遠方の対象物を測定可能となる向きに変化させる反射部19と、距離情報に基づいて足元の障害物を検出する足元障害物検出部57と、距離情報に基づいて自己位置を推定し、移動量から求めた自己位置を、推定した自己位置を用いて補正する自己位置推定部55と、検出した障害物情報と、補正した自己位置とに基づいて、移動装置23の制御を行う走行制御部59と、を備える。
(もっと読む)
追尾式レーザ干渉測長計
【課題】回転機構の回転角度を適切に取得することができる追尾式レーザ干渉測長計の提供。
【解決手段】追尾式レーザ干渉測長計1は、第1の再帰反射体としての測定基準器2と、被測定物Wに取り付けられる第2の再帰反射体としてのターゲット3と、測定基準器2にレーザ光源から出射される光を導くとともに、測定基準器2にて反射された光を出射する本体部4と、測定基準器2を中心として本体部4を回転させる回転機構5と、回転機構5を制御する制御装置6とを備える。本体部4は、測定基準器2にて反射された光を受光し、受光した光の位置を検出する二次元PSDを備える。制御装置6は、回転機構5の回転角度を取得する角度取得部63と、二次元PSDにて検出される光の位置に基づいて、角度取得部63にて取得される回転機構5の回転角度を補正する角度補正部64とを備える。
(もっと読む)
干渉計
【課題】移動体までの距離を安全に測定することができる干渉計を提供すること。
【解決手段】干渉計1Aは、干渉計1Aから射出される光の光量を調整可能に構成された調光手段3Aと、受光手段47,49の受光量が所定の第1閾値以下か否かを判定する第1判定手段と、第1判定手段が、受光量が第1閾値以下と判定した場合、調光手段3Aに、干渉計1Aから射出される光の光量の低減を命じる低減信号を出力する低減信号出力手段とを備える。調光手段3Aは、低減信号が入力された場合、光源から射出される光の光量を低減させる。従って、干渉計1Aが反射体101を見失ってしまった場合、調光手段3Aが干渉計1Aから射出される光の光量を低減させることとなるので、干渉計1Aの周囲で作業する人に干渉計1Aから測定光が照射されてしまうことを防止でき、移動体2までの距離を安全に測定できる。
(もっと読む)
光電スキャナ
【課題】空間領域の走査において従来より大きな角度領域を捕らえられるスキャナの提供。
【解決手段】光線16を出射するための発光器12、第1の部分期間には前方の監視領域26を、また第2の部分期間にはスキャナ10の後方領域を交互に塗りつぶすように第1の偏向方向に光線を周期的に偏向させるための第1の偏向ユニット18、20、監視領域から拡散反射又は直反射された光線32から受光信号を発生させるための受光器38、及び受光信号に基づいて監視領域内の物体30を認識するように構成された評価ユニット40を備える光電スキャナを提供する。このスキャナには、光線を第2の偏向ユニット44へ向けて方向転換させるために後方領域に方向転換ユニット42が設けられ第2の偏向ユニットが光線を第1の偏向方向に対して横方向に延伸する第2の偏向方向に周期的に偏向させるように構成されている。
(もっと読む)
光測距装置
【課題】要求に応じて動作状態を変更することのできる光測距装置を提供する。
【解決手段】光測距装置1は、光反射面を有する可動部が揺動することで光反射面に入射される光を対象領域内でリサージュ走査できる光走査部5、可動部を第1方向、第2方向に揺動させる第1駆動信号、第2駆動信号を光走査部5に供給して可動部を揺動駆動する駆動部7、光反射面に向かってパルス光を出射する光源部9、パルス光の反射光を受光する受光部11及びパルス光の出射タイミングと反射光の受光タイミングとに基づいてパルス光を反射した物体までの距離を計測する測距部13を備える。駆動部7は、第1駆動信号と第2駆動信号との位相差を変更する位相差変更部72、及び、第1駆動信号及び第2駆動信号を大きさ調整して可動部の揺動振幅を変更する振幅変更部73の少なくとも一方を含む。
(もっと読む)
距離測定方法、距離測定システム及び距離センサー
【課題】距離測定方法を提供する。
【解決手段】距離測定方法は、複数の変調位相オフセットで複数の積分信号を測定する段階と、複数の変調位相オフセットのうちから他の一つの積分信号に対する受信時間を調節するために、複数の変調位相オフセットのうちから少なくとも一つに対する少なくとも一つの積分信号をそれぞれ推定する段階と、推定された少なくとも何れか一つの信号によってターゲットと受信器との距離を決定する段階と、を含む。
(もっと読む)
物標検出装置および物標検出方法
【課題】高い認識精度と、高いリアルタイム性とを兼ね備えた物標検出装置および物標検出方法を提供する。
【解決手段】記憶部4には、対象物の認識に用いるトレーニング用および参照用の特徴量(ポジティプデータ、ネガティブデータ)として、画像中のROIの大きさを考慮して、複数の画像サイズのものが記憶されている。制御部4では、複数の参照用の特徴量のうち、特徴量の距離(サイズ)に対応した特徴量が選択された上で、マッチングが行われる。これにより、ステレオカメラ2から得られたROIの2次元画像の距離(サイズ)が、あらかじめ用意された参照用の特徴量の距離(サイズ)と大きく異なることをなくすることができる。
(もっと読む)
動体判別機能付き電子機器
【課題】 動体を正確に判別することができるコンパクトな電子機器を提供する。
【解決手段】 動体しきい値記憶手段104の動体しきい値を、測定対象物までの距離が遠い場合には大きく、測定対象物までの距離が近い場合には小さくなるように、測定距離範囲毎に予め設定する。動体判定手段106は、測距値の最大値と最小値の差が所定の動体しきい値よりも大きい場合に測定対象物が動体であると判定する。
(もっと読む)
ビーム照射装置
【課題】シリンドリカルレンズ等のビーム整形用レンズを用いることなく、所望の形状のビームを目標領域に照射可能なビーム照射装置を提供する。
【解決手段】 レーザ光を出射するレーザ光源410と、レーザ光源410から出射されたレーザ光が入射される収束レンズ430と、収束レンズ430を透過したレーザ光を目標領域において走査させるためのミラーアクチュエータ100を備える。レーザ光源100は、レーザチップのpn接合面が鉛直方向に平行となるように配される。レーザ光源100の発光部の鉛直方向に平行な方向の長さによって、目標領域における前記レーザ光の鉛直方向の長さが設定される。
(もっと読む)
光スイッチを備える絶対距離計
【課題】ドリフトをほとんど発生させることなく、動いているターゲットを正確に測定するADMを提供する。
【解決手段】絶対距離計(ADM)は、放出光を放出する光源を含み、スイッチ制御信号に応答して少なくとも2つの位置間で切り換わる少なくとも1つの光スイッチを有するファイバ交換網200を含み、これらの位置の第1の位置は放出光がファイバ交換網からターゲットの方へ放出され、測定光としてファイバ交換網内へ後方反射される測定モードにし、これらの位置の第2の位置は光ビームがファイバ交換網内の基準光を含む基準モードにする。ADMは、時間的に間隔を空けて多重化した形で測定および基準光を検出し、測定ビームおよび反射された光ビームの電気信号を提供する単一チャネル検出器、それに応答した電気信号を提供する単一チャネル信号処理装置、その電気信号を処理してターゲットまでの距離を決定するデータ処理装置400とを含む。
(もっと読む)
受光装置、情報取得装置および物体検出装置
【課題】透過波長帯域の異なる複数のフィルタの切り替えによって透過波長帯域の調整を行う場合に、フィルタ部全体の大きさを抑制できる受光装置、および、このような受光装置を用いた情報取得装置、物体検出装置を提供する。
【解決手段】情報取得装置1は、光を受光して信号を出力するCMOSイメージセンサ16と、レーザ光源11からのレーザ光をCMOSイメージセンサ16へと導く撮像レンズ14と、撮像レンズ14からのレーザ光と交差する方向に透過波長帯域の異なる複数のフィルタ151、152、153が直線的に並べられたフィルタユニット15と、フィルタユニット15を複数のフィルタ151、152、153の並び方向にスライドさせるためのアクチュエータ50とを備えている。
(もっと読む)
過冷却浮遊水滴のための飛行中に働く複数視野の検出器
【課題】本装置は、浮遊水滴の存在を検出し、かつ、レーザビームが雲を貫通したとき、そのビームの横方向散乱を測定することによって、それら水滴の直径のプロファイルを反映した情報を提供する。
【解決手段】飛行中に働く複数視野の水滴センサは、照射部と検出部とを備える。照射部は、光ビームを出力するように構成された、第1の光学的ビームエミッタを備える。検出部は、後方散乱光の第1の部分を、サークルツウライン変換器の内側反射面に向けて導くように構成された万華鏡と、サークルツウライン変換器によって反射された光を受光するように構成された、少なくとも第1の検出器を有する複数視野のサブシステムと、後方散乱光の第2の部分を受光するように構成された単一視野のサブシステムとを備え、第2の部分は、サークルツウライン変換器によって反射されていない。単一視野のサブシステムは、単一視野中の情報に基づき、液体水滴と氷晶の間を区別するためのデュアルチャネル円偏光検出器を備えることができる。
(もっと読む)
光測距装置
【課題】霧などの外乱の中に測定対象物が存在する場合であっても、この測定対象物を見落としなく検出できる光測距装置を提供する。
【解決手段】受光素子の検出信号のレベルが閾値に到達した時点を受光タイミングとして検出する立上がり回路と、受光素子の検出信号をフィルタリングした後の信号のゼロクロス点を受光タイミングとして検出する共振回路とを備え、前記立上がり回路の閾値を、霧などの外乱からの反射光について受光タイミングを検出しないように設定する。そして、両回路が同じ受光タイミングを検出した場合には、光量に基づいてより高い精度を示す回路を選択して距離データを出力させる。また、共振回路による受光タイミングの検出の後で、立上がり回路が受光タイミングを検出した場合は、立上がり回路で検出された受光タイミングを選択して、距離データを出力させる。
(もっと読む)
動線認識システム
【課題】監視領域が広い対象に対して有効な動線認識システムを提供する。
【解決手段】監視領域内における移動体の位置検出をマルチレーザスキャナ方式で行う。そして、このマルチレーザスキャナ方式により検出された移動体の位置を示す位置情報を、当該位置に移動体が居た時刻を示す時刻情報とともに監視領域移動体情報としてレーザ動線データベース27に記録する。一方、監視領域内の一部である特定領域内における移動体の位置を、マルチレーザスキャナ方式よりも位置検出の精度が高いカメラ画像方式で行う。そして、このカメラ画像方式により検出された移動体の位置を示す位置情報を、当該位置に移動体が居た時刻を示す時刻情報とともに特定領域移動体情報としてカメラ動線データベース28に記録する。
(もっと読む)
目標捕捉追尾装置
【課題】2次元画像の視野内に存在する目標の3次元形状を取得する際の視軸設定及び対象視野の自由度を向上させ、効率よく目標を追尾する目標捕捉追尾装置を得る。
【解決手段】2次元画像情報を取得するセンサを有する赤外線撮像部と、3次元形状情報を取得するセンサを有するレーザレーダ部とを分離した構成とし、2次元画像情報の視軸及び視野と、3次元形状情報を取得する方向及びその走査範囲とをそれぞれ独立に設定可能にする。そして、赤外線撮像部の視軸は自身の移動方向に一致させつつ、レーザレーダ部の視軸は、目標を捕捉する際には、赤外線撮像部の視軸の方向に一致させるとともに、赤外線撮像部の視野の方位角範囲に一軸走査してその3次元形状情報を取得する。また、目標を追尾する際には、目標の方向に視軸を設定し、これを基準とする限定された範囲を一軸走査して目標の3次元形状を取得する。
(もっと読む)
161 - 180 / 450
[ Back to top ]