
Fターム[5J084EA29]の内容
光レーダ方式及びその細部 (24,468) | 目的 (2,756) | 警報、安全 (201)
Fターム[5J084EA29]に分類される特許
101 - 120 / 201
自動ドア用安全装置
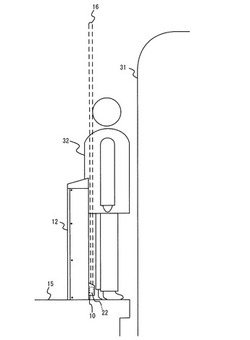
【課題】距離画像センサユニットを用いて鉛直方向での面検知を行い、所定の検知エリアでの支障物を精度良く検知してドア部の接触部分での支障物の挟み込みを確実に防止することのできる自動ドア用安全装置を提供する。
【解決手段】プラットホーム用可動安全柵11の戸袋12の下方に自動ドア用安全装置10の鉛直方向距離画像センサユニット22を配置する。自動ドア用安全装置10は、ドア部13付近で略鉛直方向にレーザー光23aを照射し、ドア部13に平行な検知エリア16(17)で面検知を行い、扇形エリア内に支障物があるときこの支障物までの距離情報を含む距離画像を生成する少なくとも1つの鉛直方向距離画像センサユニット22と、距離画像センサユニット22により生成された距離画像に基づいて、扇形エリア内の前記支障物の存在の有無を判定する判定手段27を備えている。
(もっと読む)
航空機の識別およびドッキング誘導システム

【課題】到来する航空機等の対象物を適当な停止点まで正確且つ能率的に追跡する。
【解決手段】到来する対象物(12)を追跡するシステムは、光パルスを発生する手段(20)と、そのパルスを外方に、到来する対象物に投射し、その対象物からそのパルスを反射させる手段(21,22,24,25)と、その対象物から反射した光パルスを収集する手段(20)と、システムを較正すべく、投射光パルスを既知の角度方向にかつ既知の距離に配置された較正要素に指向させる手段(26)と、所定点から延びる仮想軸線に対する位置を検出し、その対象物とその所定点の間の距離を検出して、その対象物の位置の追跡を可能とする手段(62)と、を有し、レーザ走査に関する情報を反映し既知の形状を表わす輪郭テーブルと比較される比較テーブルを生成し、各反射パルスについて対象物のノーズから測定装置までの距離の分布を記録する距離分布テーブルを生成し、予定停止位置までの平均距離を計算する。
(もっと読む)
物体検出装置
【課題】停止車両を、路面標示や路面に埋め込まれた反射物等の路面設置物と、区別して検出することができる物体検出装置を提供する。
【解決手段】レーダ装置1は、水平方向、および垂直方向にレーザ光を走査し、自車両前方に存在する物体を検出する。また、制御部2は、検出物体について、(a)停止物体である、(b)自車両からの距離が予め定めた路面設置物判定距離D1よりも短い、(c)前回の下走査で得られた反射波の強度が、前回の上走査で得られた反射波の強度の路面設置物判定係数倍(×α1)よりも大きい、および、(d)前回の下走査で得られた反射波の強度が、今回の基準走査で得られた反射波の強度よりも大きい、という、4つの条件が全て成立したときに、その検出物体を自車両の走行を妨げない路面設置物であると判定する。
(もっと読む)
推定装置
【課題】前方車両の形状及び運動状態を正確に推定する。
【解決手段】推定装置は、レーダ波によって、前方車両表面の複数地点の位置座標を計測し(S110)、この複数地点を単一線分及び二線分で近似する(S120,S1300)。そして、各線分毎に、求めた線分長さ及び近似誤差に基づき、線分が車両前後面、側面を近似した線分である事前確率を算出する(S1400)。一方、過去において推定された前方車両の位置、向き、速さ、進行方向及び角速度の情報を基に、尤度を算出する(S1500)。そしてベイズ推定により、既に求めた事前確率と尤度とから、各線分毎に、線分が車両前後面、側面を近似した線分である事後確率を算出し(S1600)、前方車両のサイズ、位置及び向きを推定する(S1700)。また、これらの情報を基に、アンセンテッドカルマンフィルタにより、車両の速さ、進行方向及び角速度も合わせて推定する(S1800)。
(もっと読む)
対象物検出装置
【課題】反射強度のピークが3つ以上存在する場合において、対象物が車両であるか否かを精度良く判定することができる対象物検出装置を提供する。
【解決手段】制御回路11は、窪みの強度の所定倍(例えば0.5倍)となる基準強度を算出し、左右端ピークから物体端部(左右端ピークの左脇および右脇)に向かって、この基準強度に相当する走査方向(左側基準方向および右側基準方向)を求め、これらの基準方向間の幅(広がり幅Ws)が車両と判定できる所定幅(例えばWs_max=5.0[m])に収まっている場合、車両らしいとして判定する。
(もっと読む)
光走査型光電スイッチ
【課題】保護領域の設定等、光走査型光電スイッチの種々の設定が簡便に行える光走査型光電スイッチを提供する。
【解決手段】接続される機器の動作許可/動作不許可を示す安全信号を出力する光走査型光電スイッチに関する。光走査型光電スイッチの安全機能の状態および故障状態の情報の内の少なくとも1つの情報を表示する表示画面を有する表示部38aと、前記表示部38aの近傍に設けられ、表示部38aの表示内容を安全信号、判別結果、光走査型光電スイッチの設定内容、光走査型光電スイッチの安全機能の状態および故障状態の情報の内の1つの情報から他の前記情報に変更するための操作部39とを備えている。
(もっと読む)
障害物検出装置
【課題】移動体にピッチ角変化が生じても、障害物検知の範囲が適切に確保できる障害物検出を提供する。
【解決手段】車両1の走行方向X前方に向けて電磁波を照射すると共にその電磁波によるスキャン範囲を上下方向に設定した照射手段を、車幅方向左右に離して2つ設ける。その2つの照射手段からの照射方向2Gを、上記走行方向X前方で交差するように設定する。そして、照射した電磁波の障害物からの反射波に基づき障害物を検出する。
(もっと読む)
自己混合レーザセンサを有する安全システム及びそのような安全システムを駆動する方法
自己混合干渉で動作するレーザセンサ10を収容したセンサモジュール15を有する安全システムが記載されている。上記レーザセンサ10は、人間の身体等の物体の速度及びオプションとして該レーザセンサ10と該物体との間の距離に関する測定データを発生する。該レーザセンサ10により収集され、且つ、エアバッグコンピュータ等の制御回路30に供給される上記測定データに依存して、該エアバッグコンピュータは、エアバッグ35等の安全手段を駆動して人体の負傷を防止する。更に、このような安全システムを駆動する方法も記載されている。 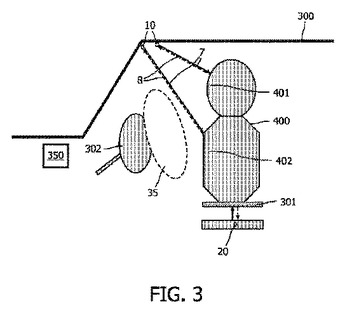 (もっと読む)
(もっと読む)
車両用距離画像データ生成装置
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置を提供する。
【解決手段】 自車両前方に所定周期でパルス光を投光する投光器7と、撮像エリアに応じて設定される撮像タイミングで撮像エリアから帰ってくる反射光を撮像する高速度カメラ8と、撮像エリアが連続的に変化するように撮像タイミングを制御するタイミングコントローラ9と、高速度カメラ8により得られた撮像エリアの異なる複数の撮像画像における同一画素の輝度に基づいて、画素毎の物体までの距離を表す距離画像データを生成する画像処理部10と、を備え、画像処理部10は、パルス光を投光せずに自車両前方を撮像した外乱光ノイズ除去用のフィルタ画像に基づいて、各撮像画像の輝度を補正する。
(もっと読む)
先行車認識装置及び先行車認識方法
【課題】先行車の認識精度を確保しつつ、物体状況に応じ安定して先行車を認識する。
【解決手段】送信し物体からの反射波を受信して物体認識の情報を習得する。取得した物体認識の情報に基づく形状的特徴が、車両の形状的特徴に合致するか否かで先行車か否かを判定する。そして、先行車が存在すると判定する度に、積算カウンタに所定のカウンタ値を加算し、積算カウンタの値が所定値以上となると先行車と認識する。カウンタ積算手段で加算するカウンタ値を、先行車との判定の確からしさが高いほど大きな値とする。
(もっと読む)
先行車検出装置およびこれを用いた車速制御装置
【課題】 先行車の車線変更を検出できる先行車検出装置およびそれを用いた車速制御装置を提供する。
【解決手段】 先行車検出装置100は、先行車の自車両に対する進行角度である背面角度を検出する先行車横位置および車体傾き演算記憶部303と、自車両の直進状態を検出し、自車両の直進中に背面角度が増加後減少した場合、先行車は車線変更したと判定する先行車および走行路判定部302と、を備える。
(もっと読む)
距離測定装置
【課題】スポット光束を目標物体に照射しながら作業者が接眼レンズを通して目標物体を見ようとした場合、眩しさなどの不快な思いをさせず、快適な状態で作業を行える距離測定装置を提供すること。
【解決手段】目標物体を視準する視準光学系I1と、前記視準光学系の焦点板5に前記目標物体の像を結像する合焦レンズ3と、前記目標物体に測距光を送光する送光光学系I2と、前記目標物体からの前記測距光の反射光を受光する受光光学系I3と、前記目標物体にスポット光を照射する可視レーザ光源部8と、前記合焦レンズが所定位置に配置されたことを検出する検出手段23と、前記検出手段の信号に基づき前記可視レーザ光源部を駆動して前記目標物体に前記スポット光を照射する制御手段30と、を有する距離測定装置100。
(もっと読む)
移動ロボット及びレーザレンジセンサの走査速度制御方法
【課題】移動ロボットの状態に応じてレーザレンジセンサが照射するレーザ光の走査速度を適切に変更する。
【解決手段】移動ロボット100は、外界の対象物までの距離を計測するためのレーザレンジセンサ10と、レーザレンジセンサ10から外界に向けて照射されるレーザ光の走査速度を制御する走査速度制御部17とを備える。さらに、走査速度制御部17は、移動機構によって移動中の前記移動ロボットが前記外界に存在する障害物に接近したことに応じて、走査速度を第1の速度から前記第1の速度より低速の第2の速度に変更する。
(もっと読む)
移動ロボットの監視装置および監視方法
【課題】人と移動ロボットが同一エリアを移動する場合に、移動ロボットの大きさと速度が人と同じ程度である場合でも人と移動ロボットを確実に識別することができ、移動ロボットの安全機能が誤動作しても監視員なしで人の安全を確保することのできる移動ロボットの監視装置および監視方法を提供する。
【解決手段】移動ロボット1に取り付けられレーザ光を強く反射するリフレクタ12と、移動ロボットの移動エリアを3次元計測する3次元レーザレーダ14と、3次元レーザレーダによる計測結果から移動ロボットと人とを識別し、人と移動ロボットの相対距離が所定の閾値より小さいときに移動ロボットの動作を抑制するロボット抑制装置16とを備える。
(もっと読む)
物体検出装置
【課題】特定の範囲に存在している物体の位置検出精度を向上させる。
【解決手段】検出対象の物体が比較的遠距離に存在している車両の前方領域と、検出対象の物体が比較的近距離に存在している車両の側方領域を含む物体検出範囲内で、長手方向を鉛直方向に略一致させたスリットのレーザ光を走査させ、物体で反射されたレーザ光を、受光面20Aのうち、前方領域からのレーザ光の受光範囲におけるレーザ光移動方向に直交する方向に沿った受光素子24の配列のピッチが、側方領域からのレーザ光の受光範囲におけるレーザ光移動方向に直交する方向に沿った受光素子24の配列のピッチよりも小さくされた受光器で受光し、レーザ光を反射した物体の鉛直方向位置を検出することで、比較的遠距離に位置し前方領域内に存在している物体の鉛直方向位置の検出精度を向上させる。
(もっと読む)
対象検出装置、対象検出方法、および対象検出プログラム
【課題】レーザセンサを用いた対象検出技術において、広い検出範囲を維持したまま、誤検出を減らす。
【解決手段】対象検出方法は、レーザ投受光部の取付位置から斜め下方にレーザビームを発射することで対象を検出するための方法であって、レーザ投受光部から被検出物までの距離情報を取得する距離情報取ステップと、被検出物がレーザ投受光部側に接近してくる際に被検出物の追跡が途切れたか否かを判定可能である追跡消滅判定ステップと、被検出物の追跡が途切れた場合に、被検出物の追跡が途切れる直前の距離情報に基づいて、被検出物が対象であるか又は非対象であるかを判定する対象判定ステップとを備えている。
(もっと読む)
通行人行動解析装置及び通行人行動解析方法並びにそのプログラム
【課題】比較的に広い場所に大勢の人が存在するような場合における通行人の追跡処理の精度を向上させることのできる通行人行動解析装置を提供する。
【解決手段】通行人の足のレーザセンサからの距離を示す距離データを受信し、複数のレーザセンサによって取得された距離データを複数用いて、同時刻における空間平面上のレーザセンサの検出位置を示すセンシング画像データを生成する。そして、センシング画像データにおける複数の検出位置をクラスタリングし、そのクラスタリング結果から一人の通行人の足に対応するクラスタを特定し、特定した通行人のクラスタから、当該通行人の足のポイントの位置、歩行方向、歩幅、歩行周期、歩行位相を決定する。また、各パラメータとParticle filterアルゴリズムを用いて通行人の軌跡を解析する。
(もっと読む)
移動体の障害物位置認識方法及び移動体
【課題】小型で低コストの一次元レーザスキャナを用いて、移動体の移動方向とは異なる二次元方向に測定光を走査させ、障害物を位置認識できるようにすること。
【解決手段】移動面A上を移動する移動ロボット1の本体3と移動用走行輪5とを接続する走行輪アーム7のアーム部71,73を、ロータリアクチュエータ75の回転により適宜個別に屈伸させ、本体3をチルト方向に揺動させて、移動面A上の障害物を認識するため外界センサ13が出力する、移動ロボット1の左右方向に走査される測定光を、上下方向にも走査させる。本体3をチルト方向下方に揺動させ外界センサ13で受光した移動面Aからの反射光から割り出した、移動面Aの座標値群のローカル座標系における鉛直座標軸の方向と、加速度センサ153の出力から割り出した重力方向とのずれ角で、ローカル座標系からグローバル座標系への座標値変換用のキャリブレーションデータを得る。
(もっと読む)
車載用レーダ装置
【課題】レーザレーダがその前方に放射するレーザ光を、安価で損失の少ない構成により前方と左、右の三方に振り分け、前方と左、右の三方の探査が行なえるようにする。
【解決手段】車両に搭載されたレーザレーダ12がその前方の一定角度の範囲に放射するレーザ光の一部、すなわち、左、右端部のレーザ光を、前方に放射される残りのレーザ光の損失を生じることなく、反射鏡13a、13bにより外向きに反射して左、右方向の探査に振り分け、レーザレーダから前方に放射されるレーザ光により、安価な構成で、レーザ光の損失を生じることもなく、前方と左、右の三方の探査を行なう。
(もっと読む)
レーザエリアセンサ
【課題】実際の設置場所や警戒目的などに合わせて誤検知を極力防止できる適切な警戒領域を簡単に設定できるとともに、さらに任意の警戒領域を容易に設定可能なレーザエリアセンサを提供する。
【解決手段】レーザ距離計110と、その測定方向を変えるスキャン機構120と、測定方向を変えながらレーザ距離計110による測定を周期的に行うことにより、検知エリアを形成するとともにその検知エリア内における方向毎の距離情報を時系列で取得する距離データ取得部130と、その距離情報の中から人体に対応すると推測される部分を抽出するとともに、抽出部分の時系列での移動状況に基づいて人体であるか否かを判定する人体判定部140と、警告出力制御部150と、メモリ160と、DIPスイッチ170とを備える。
(もっと読む)
101 - 120 / 201
[ Back to top ]