
Fターム[5J084EA29]の内容
光レーダ方式及びその細部 (24,468) | 目的 (2,756) | 警報、安全 (201)
Fターム[5J084EA29]に分類される特許
161 - 180 / 201
距離データ生成方法、距離画像生成装置、光電センサ

【課題】距離データをリアルタイムで得ることが可能な距離データ生成方法、その方法を用いて得られる距離データを画素値とした距離画像を生成する距離画像生成装置、及び距離画像の生成に好適な光電センサを提供する。
【解決手段】光電変換素子の出力を蓄積する二つのコンデンサを初期電圧に充電後(時刻t3)、第1補正期間(時刻t5〜t6)及び第2補正期間(時刻t6〜t7)の間、二つのコンデンサから背景光に応じた電荷を放電させる。その後、パルス光を1回照射し(時刻t8〜t10)、その反射光に応じた電荷を第1露光期間(時刻t8〜t10)及び第2露光期間(時刻t10〜t12)に分けて二つのコンデンサに別々に蓄積し、この二つのコンデンサに蓄積された電荷を画素出力値V1,V2とし、この画素出力値V1,V2から算出される強度比R(=V2/(V1+V2))に基づいて距離データLafを生成する。
(もっと読む)
物体検出照明システム及び方法

物体検出照明システム(10)は、可視光を放射する光源(12)を含む。この光源(12)には光源コントローラ(14)が接続され、所定モードにおいて可視光を放射するように光源(12)を駆動させる。光源(12)に対して光学検出器(16)が配置され、これは、物体(A)により反射/後方散乱された可視光を検出する。光源コントローラ(14)及び光学検出器(16)にはデータ/信号プロセッサ(18)が接続されて、光学検出器(16)からの検出データを受け取る。データ/信号プロセッサ(18)は、物体(A)に関連したデータ出力を、所定モード及び検出データの関数として発生する。 (もっと読む)
物体検出装置
【課題】前方道路状況等の自車周囲の状況によることなく、確実に先行車を検知・追尾し、且つ、検知領域内に存在する人への電磁波照射による障害の問題を抑制することができる物体検出装置を提供する。
【解決手段】 道路形状認識部30は、自車前方の道路形状を認識してレーダ制御部1に与える。レーダ制御部1は、受け付けた道路形状に基づいて前方道路上所定距離位置で検知能力が高くなるように特定基準領域を設定し、当該特定基準領域の送信ビーム強度を他の基準領域の送信ビーム強度よりも高強度に設定する。この際、レーダ制御部1は、各送信ビーム強度の連続照射に基づく単位時間当たりの総エネルギー量が規定値に準じるように設定する。そして、物体が検知されれば、検知された物体を含む基準領域を新たな特定基準領域に設定して、送信ビーム強度の分布を再設定し、物体検出を継続する。
(もっと読む)
車両用レーダ装置
【課題】反射強度が低下した先行車両の検知可能距離の低下を抑制し、かつ、光学設計上の制約を少なくする。
【解決手段】距離検出を行うときには発光体140での発光を行わず、受光素子82に入射される光の強度に応じた受光信号が得られるようにし、距離検出を行わないときには発光体140での発光を行い、受光素子82における受光信号成分が一定値となるようにする。これにより、距離検出を行わないときの受光信号の波形から、一定値となる受光信号成分を差し引けば、ノイズ成分のみが残ることになる。そして、このときに得られるノイズ成分をバックグランドノイズ算出回路99で求めることにより、受光信号からノイズ成分を除去することが可能となる。これにより、レーダ装置の検知可能距離が低下することを防ぐことが可能となり、光学設計上の制約も少なくすることが可能となる。
(もっと読む)
物体検出ユニット、物体検出装置、横断路の移動物体検知装置及びプログラム
【課題】表面が滑らかで光沢のある黒い物体などレーザ光線の反射率が低い物体の位置、形状を正確に検出する物体検出ユニットを提供する。
【解決手段】物体検出部20a〜20dが読み出された固定物体の位置データ中から距離の測定値を示す信号のあるレーザ光線の照射角度ごとに、そのレーザ光線の照射角度に対応する監視領域内に存在する物体の位置データ中から受光なしを示す信号のあるレーザ光線の照射角度を抽出する(S125)。そして、抽出されたレーザ光線の照射角度がある場合には、物体検出部20a〜20dがそのレーザ光線の照射角度の位置には、レーザ光線を反射しない移動物体が存在すると判断する。一方、抽出されたレーザ光線の照射角度がない場合には、物体検出部20a〜20dが監視領域内にレーザ光線を反射しない移動物体が存在しない、と判断する(S130)。
(もっと読む)
空間領域モニター装置および方法
【課題】空間領域をモニターするための、特に自動運転設備の危険領域を保護するための装置を提供する。
【解決手段】光信号を空間領域中に少なくとも一時的に光を発する照明装置を備え、第1画像記録ユニット22によって、空間領域の第1画像を記録する該第1画像記録ユニット22は、複数の画素を有する画像センサ26を備える。評価ユニット14は、伝搬時間測定を用いて、空間領域に配置され少なくとも一つの画素上に撮像される少なくとも一つの空間領域点34について距離値dMを決定するように設計される。試験装置15は、間違った距離値dMを識別するために、少なくとも一つの第1画像と一つの第2画像とを比較するように設計される。
(もっと読む)
侵入検知装置
【課題】レーザの反射光を用いて距離画像を形成する侵入検知装置において、背景距離画像と現在の距離画像とのいずれか一方で測距不能となった画素は距離変化を検知できず、侵入者の検出漏れを生じやすい。
【解決手段】距離算出部16は、レーザ反射光に基づいて物体までの距離計測値を求める。測距可否データ生成部32は、距離画像の各画素について、距離算出部16による測距の成否を表す測距可否データを生成する。背景差分算出部22は、背景距離画像及び現在の距離画像それぞれの測距可否データを参照し、両距離画像にて得られた距離計測値の変化が所定値以上である場合だけでなく、両距離画像の一方のみにて距離計測値が得られず測距不能である画素も変化画素として抽出する。侵入者判定部24は、変化画素に基づいて監視空間における侵入物体の有無を判定する。
(もっと読む)
航空機ドック入れシステムならびにエプロンの自動検査および霧または雪の検出を伴う方法
【課題】エプロンにある物体の検出を可能にし、ゲートまで前進することが安全であるか、それとも衝突の危険があるかに関してパイロットの判断を支援し、さらに、霧および雪の正確な検出を可能にする航空機検出システムの提供。
【解決手段】離れた物体の形状を得るためのレーザパルスを用いて航空機を検出し、識別し、かつドック入れするためのシステムはまず、物体を見つけて識別するまでゲートの前方の領域を走査する。物体が識別されたら、システムは物体を追跡する。システムはまた、物体の近くのエプロンの領域を監視し、地上補修車両などの障害物を検出する。システムはまた、レーザパルスを分析して、それらのパルスが固体の物体から反射されたのか、または霧もしくはその他の結露もしくは降水から反射されたのかを判定し、結露または降水を固体の物体と誤って識別するのを回避する。
(もっと読む)
誘導システムおよび誘導方法
【課題】
複数の火炎・ガス検出ユニットにより、対象空間の火煙および/またはガスを検出し、安全な方向への避難を誘導指示する。
【解決手段】
火炎・ガス検出ユニットU1,U2は、光発射部111、光検出部112、方位・距離検出部113からなるレーザレーダ11と、スペクトルアナライザ12と、誘導指示装置13(避難経路情報記憶装置14と、避難経路表示装置15と、方位情報および距離情報に基づき避難経路情報記憶装置14内の避難経路情報を参照して最適な避難経路を決定し少なくとも1つの避難経路表示装置15に表示させる制御装置16を有する)とを備えており、それぞれが独立して火煙および/またはガスの検出を行う。
(もっと読む)
停止車両判別装置、自動車及び停止車両判別方法
【課題】高分解能のレーザレーダを用いなくても、自車両前方の物体が停止車両であるか否かを、精度良く判別することができる停止車両判別装置、それを備えた自動車及び停止車両判別方法を提供する。
【解決手段】自車両と自車両前方の停止物との距離Py_z0[i]に基づいて、停止車両判別閾値を設定し、その停止物の横幅objW_z0[i]と停止車両判別閾値とを比較することで、当該停止物が車両であるか否かを判別する。このとき、停止車両判別閾値として上限閾値Th_Width2[i]と下限閾値Th_Width1[i]とを設け、自車両と停止物との距離が遠ざかるほど前記上限閾値を大きく、前記下限閾値を小さくする。
(もっと読む)
航空機上での乱気流測定ならびに空港および風力発電基地のための方法およびライダーシステム
本発明は、ライダーシステムを使用して、特に航空機上で使用して、乱気流を測定する方法に関し、該方法では予め定めた波長の拡張パルスレーザービーム(12)を空間領域に向けて放射し、その空間領域からの後方散乱光を受信する。レーザーパルス(L)を放射後の第1の時点t1と第2の時点t2において後方散乱光の断面内の強度分布を測定し、両方の強度分布の比較によって、時点t1およびt2で画定される測定フィールド内の乱気流を決定する。スペックルパターン画像はカメラ(21、22)を利用して記録する。評価ユニット(30)は、乱気流を視覚化し、モニター(35)上に表示するために相互相関を実施する。 (もっと読む)
検知装置
【課題】領域内において検知した物体が障害物であるか否かを短時間で精度よく判断でき、かつ設備費用を削減できる検知装置及び検知方法を提供する。
【解決手段】検知装置は、所定の領域を走査するレーザレーダ10と、このレーザレーダ10により検知される距離情報とその走査方向の情報とから3次元レーダ情報を求めるレーダ情報作成手段21と、3次元レーダ情報から所定の領域内に存在する物体を検知する物体検知手段22と、所定の領域を、物体の進行方向に対して複数に分割された分割領域として認識する領域認識手段23と、分割領域の1つに所定時間継続して少なくとも1つの物体が滞留したときに、障害物が滞留していると判断する障害物判断手段24とを備えたことを特徴とする。
(もっと読む)
防犯センサ
【課題】
距離情報と大きさ情報とを同時に取得できて、検知精度を向上させると共に情報処理を容易に行うことができ、かつセンサの小型化が図れてコスト的に有利な防犯センサを提供する。
【解決手段】
警戒エリア内に存在する物体までの距離と該物体の大きさとを同時に測定可能な距離画像センサと、該距離画像センサで得られた距離画像の距離情報と大きさ情報とに基づき、物体が人体より大きいか人体より小さいかを区別して侵入者か否かを判定する判定手段と、を備える。距離画像センサは、投光手段から投光された光の反射光を受光手段で受光することによって得られた距離画像の全画素について距離測定を行い、また、背景光を除去可能なCMOS撮像素子によって形成される。
(もっと読む)
ビーム照射装置
【課題】簡素な構成にて、目標領域上におけるレーザ光の照射強度の不均一性を検出できるビーム照射装置を提供する。
【解決手段】DSP制御回路10は、PSD600からの信号をもとに、目標領域上におけるレーザ光のスキャン位置をモニタする。また、受光部90からの信号をもとに、各スキャン位置における目標領域からの反射光量を測定する。DSP制御回路10は、目標領域上におけるスキャン位置(参照位置)の反射光量P0と、当該スキャン位置に隣接する各スキャン位置の反射光量Pkとを比較する。そして、Pk/P0が閾値Rs以下のとき、この反射光量Pkに対応するスキャン位置を、レーザ光の照射強度が不均一である位置と判定する。DSP制御回路10は、レーザ光の照射強度が不均一であるとされた位置のレーザ出射強度を上昇させる。これにより、レーザ光の照射強度が目標領域内において均一化される。
(もっと読む)
車両の距離測定システムの距離測定データを評価するための方法および装置
本発明は、車両の距離測定装置の距離測定データを評価する方法に関する。車両の、観察される周囲環境のカメラ画像(100)を得て、距離測定装置によって、観察される同じ周囲環境から、距離測定データを得る。カメラ画像(100)を表示装置に表示し、距離測定データに従って、距離情報(1a´,1b´,2´)をカメラ画像(100)に統合する。本発明によれば、車両の経路(4a,4b)を確定し、場合に応じて、カメラ画像(100)に統合する。 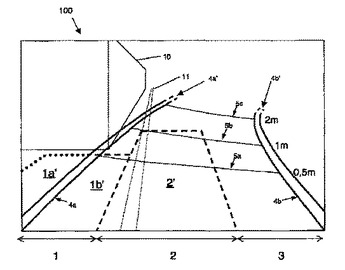 (もっと読む)
(もっと読む)
車両撮像カメラ
【課題】 車両をより確実に撮像すること。
【解決手段】 所定の車線6に進入する車両7の映像を撮像するカメラ5と、レーザが発射されてからレーザが車両7の表面で反射した反射光が受光されるまでの飛行時間に基づいて車両7の立体形状を示す距離画像を間欠的に生成するフラッシュレーザレーダ4と、その距離画像に基づいてカメラ5を制御する制御装置11とを備えていることが好ましい。
(もっと読む)
ビーム照射装置
【課題】 簡素な構成にて、走行状況を判定し、この判定結果に基づいて車両制御用情報を設定することができるビーム照射装置を提供する。
【解決手段】半導体レーザ100からのレーザ光は、レンズアクチュエータ300に支持された照射レンズに入射される。照射レンズを通過したレーザ光は、レンズアクチュエータ300の駆動に応じて、Y−Z平面方向に出射角度が変化する。これにより、目標領域におけるレーザ光のスキャンが行われる。照射レンズを通過したレーザ光は、ビームスプリッタ400によってその一部が反射され分離される。分離された光は、集光レンズ500を通してPSD600上に収束される。DSP制御回路10は、PSD600からの信号をもとに、照射レンズを通過したレーザ光のスキャン位置をモニタする。そして、照射位置がスキャン軌道から外れたとき、悪路等により走行状況が良くない、と判断し、車高の高さ、あるいは、ダンパーの減衰力などの車両制御用情報を設定する。
(もっと読む)
携帯端末
【課題】 プロジェクタの利用を不必要に妨げることなく、プロジェクタが出力する光に対してアイセーフを確保することのできる携帯端末を提供する。
【解決手段】 プロジェクタ2は、画像を外部のスクリーンに投射する。距離測定部4は、プロジェクタ2の光源と人物の目までの距離を測定する。光源制御部6は、測定した距離に基づいて、プロジェクタ2の光源の出力を制御する。
(もっと読む)
車両用駐車支援装置
周囲に関するデータを車両の外部範囲に記録する工程と;特定領域の大きさを該周囲に関する記録されたデータを使用して計算する工程と;前記特定の領域が、計算された大きさと予め公知の車両固有参照値とを使用することで駐車スペースとして適切かどうかに関する評価を行う工程とからなる車両の駐車支援法が開示されている。この発明によれば、周囲に関するデータの記録は、3D光学システムによる周囲の3次元画像の記録を含む。  (もっと読む)
(もっと読む)
衝突防止装置及び衝突防止装置搭載車両
【課題】 実際の走行車両に対応可能な衝突防止装置を提供する。
【解決手段】 レーザ光を用いて計測対象物の3次元情報を取得する3次元情報取得装置と、取得した3次元情報に基づいて移動体の制動手段、或いは移動体に備える警報器に信号を出力するコンピュータとを備える衝突防止装置であって、3次元情報取得装置12は、レーザ光照射ユニット20と、計測対象面に反射して到来したレーザ光を受光する光学ユニット30と、レーザ光照射ユニット20からのレーザ光と光学ユニット30で受光したレーザ光との位相差を割り出すレーダ回路ユニット50とからなり、光学ユニット30には、取得する3次元情報の分解能に対応する数のそれぞれ異なるパターンに従って反射面を構成して、到来するレーザ光を受光部に導く空間変調器38を備え、レーザ光照射ユニット20には、照射するレーザ光を拡散させるレンズ22を備えたことを特徴とする。
(もっと読む)
161 - 180 / 201
[ Back to top ]