
Fターム[5J084EA29]の内容
光レーダ方式及びその細部 (24,468) | 目的 (2,756) | 警報、安全 (201)
Fターム[5J084EA29]に分類される特許
61 - 80 / 201
遠隔監視システム

【課題】監視領域と監視室とが離れている場合であっても、低コストで監視業務を効率化することができ、障害物の内容や障害物検知装置の異常を的確に把握することができる遠隔監視システムを提供する。
【解決手段】レーザ光Lを照射して計測データDを出力する計測手段1と、障害物を検出する障害物検出手段2と、障害物検出時に警報信号を出力する出力手段3と、計測データDを単位時間Δt毎に区切った計測データファイルFを作成する計測データ処理手段4と、計測データファイルFを保存する記憶手段5と、計測データファイルFを出力手段3に伝送する通信手段6と、を備え、計測データ処理手段4は、障害物が検出された場合に障害物検出時tnの計測データDを含む計測データファイルFnを抽出して伝送する。
(もっと読む)
障害物検知装置及び障害物検知方法

【課題】電線のような細い障害物であっても、これを適切に検知し、その高さから障害物と移動体の衝突可能性を判定する。
【解決手段】光源11、12はそれぞれ点光源であり、鉛直方向に対して傾いた角度をなす面状に発散する照射光111、121をそれぞれ発する。障害物100が線状であれば、この光って見える箇所は、照射光111のなす面と障害物100との交点、照射光121のなす面と障害物100との交点の2箇所であり、どちらの箇所も点状であるため、これらは輝点として見える。撮像部20は、少なくとも2つの輝点が視野に入り、これらが認識できるように設定される。これらを撮像した2次元画像中における2つの輝点の位置及びこれらの間の間隔から、制御部30は、光源11、12から障害物100の高さを算出し、移動体の最大高さとの関係から障害物100と移動体との衝突可能性を判定する。
(もっと読む)
レーザセンサ及びこれを用いた検出対象判定方法
【課題】レーザセンサを用いて検出対象を検出したときに検出対象が分離して認識されても、これらが一体のものか否かを判定することができるレーザセンサ及びこれを用いた検出対象判定方法を提供する。
【解決手段】検出対象領域6に対してレーザ光を出射するレーザ光出射部2と、検出対象7a、7bからの反射レーザ光を受光して受光情報を出力する受光部3と、受光情報を一時的に記憶する記憶部5と、受光部3及び記憶部5の少なくとも一方から受光情報を受け取り、受光情報が歩行者又は車両のいずれのカテゴリに属するかを判定条件に基づいて判定する判定部4とを備え、判定条件は、受光情報に基づき、対応する検出対象7a、7bの大きさを判定するための大きさ判定基準と、前回の走査周期と今回の走査周期にて得られた受光情報に基づき、同一の検出対象7a、7bの移動距離を判定するための移動距離判定基準を含む。
(もっと読む)
レーザレーダ装置
【課題】検出物体の検出精度を高め得るレーザレーダ装置を提供する。
【解決手段】フォトダイオード20により検出時間Tが所定の時間範囲ΔT内にあるとして検出される反射光のうち、その光量に対応する受光信号の振幅Aが、異物反射光量Lsより低く設定された異物検出閾値Ad以上であり異物反射光量Lsより高く設定された近点検出閾値An未満である反射光を無効とし、当該振幅Aが近点検出閾値An以上である反射光の検出時間Tに基づいて検出物体までの距離が測定される。
(もっと読む)
物体検出方法及びその装置
【課題】監視領域上における走査光の走査位置を基準にしなくても、監視領域の全体分に応じた走査光の反射光に関するデータを用いた正確な物体検出を実現すること。
【解決手段】信号処理部3で生成された計測データDを制御装置6がパケット通信により受信して、その計測データDを計測データ記憶領域64aの対応するアドレス箇所に記憶させる度に、受信した所定本数分の走査線に対応する計測データDからそれらの走査線上に存在する物体の検出を行い、さらに、解析結果記憶領域64bに記憶された最新の1フレーム分の物体検出データを用いて、走査範囲Eに存在する物体の検出を行う。1回のパケット通信により制御装置6が信号処理部3から受信する計測データDのデータ量は、走査線の1本分の計測データDと一致するデータ量とすることができる。
(もっと読む)
光測距装置
【課題】レーザ安全の基準を満たす様に光測距装置を最適に制御する。
【解決手段】光測距装置は、光反射面を有する可動部が揺動することで光反射面に入射される光を光走査できる光走査部と、可動部を揺動させる駆動信号を、可動部が有する共振周波数に合わせて設定された駆動周波数で、光走査部に供給し可動部を揺動駆動する走査駆動部と、光反射面に向かってレーザ光を投光する光源部と、光反射面で反射走査されたレーザ光が物体により反射された反射光を受光する受光部と、レーザ光の各照射位置間の距離が所定値以上になる様に設定された、レーザ光の投光タイミングを光源部に指令する光源制御部と、レーザ光の投光及び受光タイミングに基づいて物体の距離を計測する測距部と、設定されている駆動周波数と投光タイミングとを共振周波数に合わせて変更する変更手段と、を備える。
(もっと読む)
歩行者安全対応器
【課題】 歩行者と、前方又は後方から歩行者に接近してくる自転車との間の距離を定期的に測定し、自転車と歩行者との距離が予め定めた距離内に入ったとき、歩行者に警報を発して歩行者の傷害事故を防ぐことを可能とする機器を提供するものである。
【解決手段】 本発明の歩行者安全対応器は、赤外線発信器と赤外線受信器により歩行者とこの歩行者に接近してくる自転車との距離を定期的に検知し、その距離dが予め定めた許容距離Dよりも小さな値となったとき、警報機構が作動して音あるいは点滅光を発し、歩行者に注意喚起を行うことを可能としたものである。
(もっと読む)
距離測定装置
【課題】レーザー光の必要な光量を確保した上で安全性の向上を図る。
【解決手段】レーザー光を出射するレーザー光源2と、レーザー光源から出射されたレーザー光を略平行光にする光学素子3と、所定の角度範囲で回動可能とされ光学素子によって略平行光にされたレーザー光を被測定物100へ向けて反射しレーザー光によって被測定物を走査する投光用ミラー4bと、被測定物で反射されて拡散されたレーザー光を反射する受光用ミラーと、受光用ミラーで反射されたレーザー光を受光する受光素子と、受光用ミラーで反射されたレーザー光を受光素子に集光して導く集光光学系と、受光素子で受光したレーザー光に基づいて生成される受光信号を処理することにより被測定物に関する距離情報を算出する制御部とを備え、レーザー光源と被測定物の間の光路上に光路範囲における外周部のレーザー光を遮蔽する遮蔽部材9を設けた。
(もっと読む)
干渉計
【課題】移動体までの距離を安全に測定することができる干渉計を提供すること。
【解決手段】干渉計1Aは、干渉計1Aから射出される光の光量を調整可能に構成された調光手段3Aと、受光手段47,49の受光量が所定の第1閾値以下か否かを判定する第1判定手段と、第1判定手段が、受光量が第1閾値以下と判定した場合、調光手段3Aに、干渉計1Aから射出される光の光量の低減を命じる低減信号を出力する低減信号出力手段とを備える。調光手段3Aは、低減信号が入力された場合、光源から射出される光の光量を低減させる。従って、干渉計1Aが反射体101を見失ってしまった場合、調光手段3Aが干渉計1Aから射出される光の光量を低減させることとなるので、干渉計1Aの周囲で作業する人に干渉計1Aから測定光が照射されてしまうことを防止でき、移動体2までの距離を安全に測定できる。
(もっと読む)
過冷却浮遊水滴のための飛行中に働く複数視野の検出器
【課題】本装置は、浮遊水滴の存在を検出し、かつ、レーザビームが雲を貫通したとき、そのビームの横方向散乱を測定することによって、それら水滴の直径のプロファイルを反映した情報を提供する。
【解決手段】飛行中に働く複数視野の水滴センサは、照射部と検出部とを備える。照射部は、光ビームを出力するように構成された、第1の光学的ビームエミッタを備える。検出部は、後方散乱光の第1の部分を、サークルツウライン変換器の内側反射面に向けて導くように構成された万華鏡と、サークルツウライン変換器によって反射された光を受光するように構成された、少なくとも第1の検出器を有する複数視野のサブシステムと、後方散乱光の第2の部分を受光するように構成された単一視野のサブシステムとを備え、第2の部分は、サークルツウライン変換器によって反射されていない。単一視野のサブシステムは、単一視野中の情報に基づき、液体水滴と氷晶の間を区別するためのデュアルチャネル円偏光検出器を備えることができる。
(もっと読む)
環境認識装置及びそれを備えた移動体
【課題】移動体の移動可能領域を適切に検出する。
【解決手段】移動体は、構造物までの距離を計測する距離計測センサ38と、距離計測センサの3次元位置を計測するセンサ位置計測装置18a,18bを備えている。制御装置20は、距離計測センサ38の計測結果とセンサ位置計測装置18a,18bの計測結果を用いて、計測された構造物の3次元位置を算出する。そして、算出された構造物の3次元位置と尤度マップを用いて、その算出された3次元位置に対応するマップ上の計測点における構造物の情報と尤度をマップに登録又は更新すると共に、その計測点の近傍の非計測点における構造物の情報と尤度をマップに登録又は更新する。
(もっと読む)
レーザスキャンセンサ
【課題】遠方の人体を確実に検知するとともに、測定方向によって測定距離範囲が比較的近いところに限定される場合などにはカバーが汚れているとの不用意な警告を抑止し、カバー全体で汚れ方にむらがある場合などにも適切な警告を行うことが可能なレーザスキャンセンサを提供する。
【解決手段】レーザスキャンセンサ100は、レーザ距離計110と、スキャン機構120と、データ取得部130と、汚れ判定部140と、警告出力制御部150と、メモリ160とを備えている。レーザ距離計110は開口部を有する筐体101の内部に配置されており、その開口部はレーザ光が透過可能なレンズカバー116で覆われている。汚れ判定部140において受光レベルとの大小比較を行う所定閾値を、測定方向毎の最大検知距離情報に基づいて変更する。
(もっと読む)
ホーム判定装置およびホーム判定方法ならびにそのプログラム
【課題】精度高く駅ホームの有無を判定できるホーム判定装置を提供する。
【解決手段】駅ホームの高さより高い列車の設置位置に設置され、駅ホームの上面から側面までの測距領域における複数の測距点と、設置位置との間の複数の距離を測定する測距センサから、当該複数の測距点に対応する複数の距離の入力を受け付ける。そして、測距センサの設置位置と、測定した複数の距離と、当該各距離を測定した際の測距センサからのそれぞれのセンシング角度と、を用いて、測距点と、設置位置との間の複数の距離を測定した際の、測距点それぞれの高さを算出する。そして、測距点それぞれの高さの算出結果と、ホーム高の予想高さとの関係に基づいて、駅ホームの有無を判定する。
(もっと読む)
光測距装置
【課題】人間の眼の保護を図りながら、測距動作を継続できる光測距装置を提供する。
【解決手段】測距モードとして、安全モードと高精度モードとを備える。前記安全モードは、被曝放出レベルが最大許容露光レベルMPEよりも小さくなる「レーザ製品の安全基準」(JIS C 6802)のクラス1に相当するモードである。一方、高精度モードは、安全モードに比べてレーザ投光頻度を上げたり、走査振幅を絞ったりするなどの設定により、被曝放出レベルが最大許容露光レベルより高い、安全基準のクラス3Rに相当するモードである。ここで、測距動作で得た距離のデータと反射光量のデータとから、至近距離に人間の眼が存在することが検出された場合、高精度モードによるレーザ放射を停止させ、安全モードでレーザ放射を行わせる。
(もっと読む)
カラー式対象物表示システム
【課題】周囲の対象物をカラー画像として表示可能であり、しかも対象物までの距離が所定の距離より近いことを瞬時に認識できるように表示できるカラー式対象物表示システムを得る。
【解決手段】R画素、G画素、及び、B画素を有するカラー式CMOSセンサ19と、CMOSセンサが受光した赤外光に基づいて対象物までの距離が設定距離範囲にあるかを判定する距離判定手段22と、R画素、G画素、及び、B画素の電気信号に基づくカラー画像と、距離判定手段の判定結果に基づく判定結果画像とを交互に生成する画像処理手段23と、時間残像現象が生じ得る時間間隔でカラー画像と判定結果画像を交互に表示するモニタ24と、を備える。
(もっと読む)
物体検知装置
【課題】距離センサの視野内にドアが存在する場合でも、監視対象である物体の状態をドアの移動と分離して判断可能にする。
【解決手段】距離センサAは、視野領域に存在する物体までの距離を計測して距離画像を生成する装置であり、ドアにより開閉される開口部の上方に配置され視野領域が下方に設定される。距離センサAの視野領域には、走行駆動されて開口部を開閉するドアが含まれる。領域規定手段9は、ドアが出入する領域を含む第1の監視領域と、ドアパネル間の隙間の領域である第2の監視領域と、開口部の外側で開口部から規定範囲内である第3の監視領域とを規定する。また、領域規定手段9は、ドアの開閉の動作に伴って各監視領域の大きさを変化させる。判断手段10は、各監視領域内における物体の存否を判断し、検知出力手段11は、判断手段10の判断結果に応じた出力信号を外部に出力する。
(もっと読む)
測距装置
【課題】不要なポインタ光の送光を止める測距装置を得る。
【解決手段】測距装置は、対象物に向けて測距用の光を送光する第1送光手段4と、測距開始操作信号に応じて、測距用の光が対象物との間を往復する時間に基づいて対象物までの距離を測る測距手段1,2と、対象物に向けて測距用の光と異なるポインタ光を送光する第2送光手段4と、第1送光手段4、第2送光手段4および測距手段1,2をそれぞれ制御する制御手段1とを備え、制御手段1は、第2送光手段4からポインタ光が送光されている状態で測距開始信号を受けると、ポインタ光の送光を停止させてから距離測定を開始させる。
(もっと読む)
測距装置
【課題】S/N比が悪くても予備測定を適切に行う測距装置を提供すること。
【解決手段】測距装置は、対象物に向けて光を送光する送光手段4と、対象物で反射された光を受光する受光手段5と、送光から受光までの時間に基づいて対象物までの距離を演算する演算手段1,2と、本測定の前に予備測定を行い、該予備測定値を用いて本測定を行うように送光手段4、受光手段5および演算手段1,2をそれぞれ制御する制御手段1とを備える。そして、予備測定時の制御手段1は、演算手段1,2によって距離演算値を所定回数だけ演算するように送光、受光および演算を繰返し制御し、所定回数だけ演算して得た複数の距離演算値に基づいてヒストグラムを求め、ヒストグラムの度数のうち最大度数が第1判定閾値P1以上の場合は、最大度数の階級に含まれる距離演算値を用いて予備測定値を得る。
(もっと読む)
車両用電子安定プログラムのための、レーザダイオードをベースにした自己混合センサ
本発明は、簡単にした車両安定制御のための、レーザダイオードをベースにした自己混合レーザセンサに関する。自己混合レーザセンサから、車両のサイドスリップ角、前輪及び後輪スリップ角、ヨーレート並びに横方向加速度が、はっきりと導き出される。ヨーレート、旋回半径及びタイヤスリップ角の分析に基づく3つの基準が、アンダーステア又はオーバーステアの発生を検出するのに用いられ、これは、簡単にした車両用電子安定プログラムを可能にする。 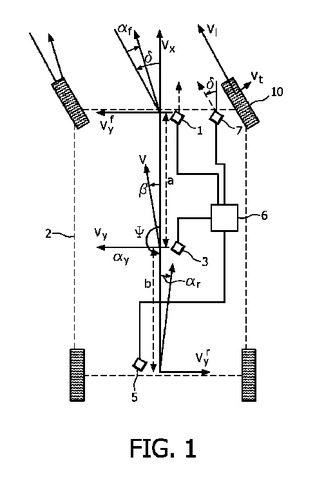 (もっと読む)
(もっと読む)
遠隔気流の警報表示方法及びそのシステム
【課題】通常は気象レーダ等による広範囲情報画面を表示させておいて、非常時にはドップラーライダーによる拡大画面を表示させるための判断を自動的に行う方法を提供する。
【解決手段】レーザ光を利用したドップラーライダー方式の光学式遠隔気流計測装置において、受信信号強度に閾値を設けて、該閾値以下の該受信信号については情報を無効とすると共に、前記閾値以上の受信信号について計測された遠隔気流情報が同位置で一定時間継続することを確認することにより、正しい気流情報と判別するようにし、当該判別情報に基づいて特異な気流情報が認識された場合には音声または表示により自動的に警報を発するものとした。
(もっと読む)
61 - 80 / 201
[ Back to top ]