
Fターム[5J084EA29]の内容
光レーダ方式及びその細部 (24,468) | 目的 (2,756) | 警報、安全 (201)
Fターム[5J084EA29]に分類される特許
41 - 60 / 201
レーザ測定装置
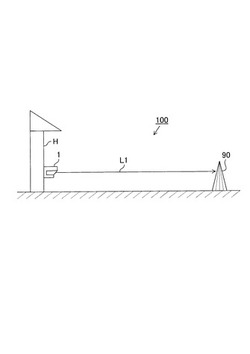
【課題】検出エリア内におけるレーザ光の実際の照射高さを容易に計測し得るレーザ測定装置を提供する。
【解決手段】レーザ測定装置100は、レーザレーダ装置1と検出用基準物体90とを備えている。検出用基準物体90の反射部は、所定の高さ方向における各位置が高さに応じた構造をなし、且つレーザ光L1が入射したときに、当該レーザ光L1が入射する高さに応じた内容の特定反射光を発するように構成されている。一方、レーザレーダ装置1は、回動反射機構40から照射されるレーザ光L1の走査エリア上に検出用基準物体90が配置されたときにこの検出用基準物体90からの特定反射光を検出している。そして、反射光の状態と高さ情報とを対応付ける対応データを参照して特定反射光の状態に対応する高さ情報を求め、検出用基準物体90におけるレーザ光の照射高さを計測している。
(もっと読む)
マルチライダーシステム

【課題】本発明の目的課題は、従来のライダーシステムよりも広範囲の計測を可能とし、更には乱気流の突入時に使用する機体の動揺低減用気流情報を短い周期で計測する方法並びにその機能を備えた装置を提供することにある。
【解決手段】本発明のマルチライダーシステムは、レーザ光を利用したドップラーライダー方式の光学式遠隔気流計測装置を相対位置固定の関係で二組以上装備し、各装置から同波長のレーザを放射させると共に散乱光を各装置で受信する機能を備え、不具合に対する冗長性を向上させるとともに、各々の計測信号の積分量を増加させることにより信号対雑音比を向上させるものとした。
(もっと読む)
距離センサ及び距離画像センサ
【課題】高感度化を図りつつ、電荷の高速転送を実現することが可能な距離センサ及び距離画像センサを提供すること。
【解決手段】受光領域は、平面形状が第1方向で対向する一対の長辺と第2方向で対向する一対の短辺とを有する長方形状である。第1及び第2半導体領域FD1,FD2は、各長辺に沿って互いに空間的に離間して配置される。第1及び第2ゲート電極TX1,TX2は、対応する半導体領域FD1,FD2と受光領域との間に配置される。第1及び第2ポテンシャル調整電極EL1,EL2は、受光領域における第1及び第2ゲート電極TX1,TX2の間に位置する領域に重複するように配置されている。第1及び第2ポテンシャル調整電極EL1には、第1及び第2ゲート電極TX1に与えられる電荷転送信号と同じ位相であり且つ電位が低いポテンシャル調整信号が与えられる。
(もっと読む)
障害物検知装置
【課題】演算処理量を軽減して、自車の車高よりも低い位置に存在する空中障害物を検知することができる障害物検知装置を提供する。
【解決手段】路面から所定の高さH/2の位置に、水平方向に対して第1の角度θ1で下向きに車両Aに設置され、第1のレーザー光を発光・受光して第1の障害物(路面)を検知する第1の検知手段1と、車両Aの上端から所定の高さH/2だけ低い位置に、水平方向に対して第1の角度θ1と対称の角度である第2の角度θ2で上向きに設置され、第2のレーザー光を発光・受光して第2の障害物(空中障害物)を検知する第2の検知手段2と、第1の検知手段1による発光から受光までの第1の時間T1と第2の検知手段2による発光から受光までの第2の時間T2とを比較して、第2の障害物が車両Aの車高Hよりも低い位置に存在する空中障害物であるか否かを判断する判断手段3と、を有する。
(もっと読む)
レーザスキャナ及びその製造方法
【課題】レーザスキャナにおいて角度の監視を簡単且つ確実に行うことができるようにする。
【解決手段】監視領域20にある物体を検出するためのレーザスキャナ10であって、発射光線16を出射するための発光器12、前記発射光線16を前記監視領域20へ向けて周期的に偏向させるための回転可能な偏向ユニット18、監視領域20にある物体により拡散反射された光線22から検出信号を生成するための受光器26、及び、角度単位形成体32を有し、前記偏向ユニット18の角度位置を検出できる角度測定ユニット32、34、38を備えるレーザスキャナ10において、前記偏向ユニット18を前記角度単位形成体32と一体的に構成する。
(もっと読む)
ホーム事故検知システム
【課題】駅ホーム上で事故を高い精度で迅速かつ確実に自動的に検知して警報を発し、駅ホーム上で駅員の在・不在、駅ホームの混雑度に応じて自動警報を行えるホーム事故検知システムを提供する。
【解決手段】このホーム事故検知システムは、駅ホームの縁に沿って設置され、計測時刻毎に検知画像を出力する複数のMEMSセンサSE1〜SEnと、複数のMEMSセンサの各々が出力する検知画像に基づき旅客像の状態に係るデータを記憶する記憶手段41と、記憶手段に記憶された旅客像の状態に係るデータと判定用データとを比較して一致するか否かを判定し、一致するときに旅客像に対応する旅客に事故が発生したと判定する処理手段52と、事故発生と判定のとき自動的に警報を発する警報手段と、駅ホームに駅員が居るか否かを判定し、警報手段を自動警報不能または自動警報可能にする駅員監視手段(62,64,65)とを備える。
(もっと読む)
移動物予測装置及びプログラム
【課題】移動物の将来の位置分布形状が複雑な形状であっても、計算量の増大を抑制することができるようにする。
【解決手段】領域分割部42によって、走路区分の領域及び静止物の領域に応じて領域を分割した領域分割マップを生成する。分岐ノード生成部44によって、領域境界上に分岐ノードを生成する。移動物生成部46によって、移動物の位置分布を、速度分布と共に記録する。領域分割マップにおいて移動物の位置分布に近傍に分岐ノードが存在する場合、移動物分割部52によって、分岐ノードの分岐すべき方向の数だけ、移動物の位置分布を生成すると共に、分岐ノードが存在する境界で隣接する領域の進入可能性に基づいて、各分岐すべき方向の分岐割合を算出し、移動物の位置分布に対して、分岐割合に応じた重み付けを行うと共に、対応する速度分布の各々を、各分岐すべき方向に応じて変更する。位置更新部48によって、移動物の位置分布を更新する。
(もっと読む)
道路端検出装置、運転者支援装置、および道路端検出方法
【課題】自車両が走行する道路における端部の位置を検出する道路端検出装置において、精度よく道路端を検出できるような技術を提供する。
【解決手段】レーダ装置は、レーダ処理にて、個別領域を自車両の進行方向の左右方向に仮想的に多数並べて形成される検出対象領域の各個別領域に対してそれぞれ光波を照射し、この光波が被測定物に反射されることによる反射光を受光して、対物距離および反射強度をそれぞれ検出する(S110〜S140)。各個別領域のうちの隣接する個別領域で各対物距離の差が基準距離差以上となる第1境界と(S160)、各個別領域のうちの隣接する個別領域で各反射強度の差が基準強度差以上となる第2境界とを検出し(S170)、第1境界の位置または第2境界の位置を道路端として設定する(S180)。
(もっと読む)
物体検出装置および情報取得装置
【課題】コンパクトな構成にて、回折光学素子の劣化を検出可能な情報取得装置およびこれを搭載する物体検出装置を提供する。
【解決手段】情報取得装置1は、波長830nm程度のレーザ光を出射するレーザ光源111と、偏光ビームスプリッタ(PBS)113と、1/4波長板114と、DOE116と、PD117を備えている。DOE116は、レーザ光を所定のドットパターンにて目標領域に照射する。PD117は、DOE116によって回折および反射されたレーザ光の一部を受光する。
(もっと読む)
距離測定モジュール及びこれを含むディスプレイ装置、ディスプレイ装置の距離測定方法
【課題】本発明は距離測定モジュール及びこれを含むディスプレイ装置、ディスプレイ装置の距離測定方法に関する。
【解決手段】本発明の一実施例による距離測定モジュールは、被写体を撮像する撮像レンズと、前記撮像レンズと隣接して配置され、前記被写体に基準光を照射する光源部と、前記被写体から反射し前記撮像レンズを介して入射された反射光を受光して前記被写体の映像情報及び距離情報を抽出する受光部と、前記基準光と前記反射光の位相差を用いて前記被写体の距離Dを演算する演算部と、を含むことができる。
(もっと読む)
障害物検知装置及びプログラム
【課題】障害物を精度良く検知することができる障害物検知装置及びプログラムを提供する。
【解決手段】本発明に係る障害物検知装置は、乗り物から測定対象物までの距離を複数の測定点それぞれについて取得する距離取得手段と、前記距離取得手段が取得した各距離のうち、前記乗り物の形状に対応した位置にある1以上の測定点における距離に基づいて、所定の距離内における障害物の有無を検知する検知手段と、を備える。そして、検知手段は、前記1以上の測定点における距離のうち、前記所定の距離よりも近い距離が所定の数以上あった場合に、前記所定の距離内に前記障害物が存在することを検知する。
(もっと読む)
捜索セット
【課題】載置場所を円滑に探し出すことができる捜索セットを提供すること。
【解決手段】本発明では、使用者が捜索具を用いて載置場所を捜し出すための捜索セットにおいて、発信部と受信部とを有する捜索具と、発信部と受信部と制御部とを収容したケーシングとからなり、ケーシングは、捜索具から発せられた信号を受信する受信部と、捜索具から発せられた信号よりも到達距離が短い微弱な信号を発信する発信部と、受信部で信号を受信した場合に発信部から所定の信号を発信するように制御する制御部とを収容し、捜索具は、所定の信号を発信する発信部と、ケーシングに収容した発信部から発せられた信号を受信する受信部と、受信部で信号を受信した場合に報知をする報知部とを有することにした。
(もっと読む)
走行制御装置
【課題】停止線などの道路上を横切る白線に対しても、サンプリング周期を短くすることなく検出可能となり、適切なタイミングで走行制御ができる。
【解決手段】車両に搭載された第1のビーム発生手段から光ビームを発生させ、この光ビームを、車両前方に対して第1の角度αだけ鉛直下方に傾かせ、かつ車幅方向に対して第2の角度θだけ車両前後方向に傾かせて固定し、車線幅の中央を横切るように走査し、車両前方の道路上で反射された光ビームの反射光を受光し、車両の速度を検出し、車両の速度に基づいて反射光の位置を算出し、この反射光の位置に基づいて、道路上の車幅方向に伸びる白線を検出し、この白線と車両の速度に基づいて車両の走行制御を行う。第2の角度θが走行速度及び光ビームの走査周期により定められる。
(もっと読む)
上方障害物検知装置、衝突防止装置および上方障害物検知方法
【課題】道路の状態や車両の姿勢の変化にかかわらず、路面の上方に存在する物標から路面までの距離を求めることができる上方障害物検知装置、衝突防止装置および上方障害物検知方法を提供する。
【解決手段】頭上物標検知手段11,12,13によりレーザ光が出射されてから戻るまでの第1の時間と、当該レーザ光が頭上物標検知手段11から出射された際の出射角である仰角を検知し、頭上物標算出手段15は、第1の時間および仰角に基づいて頭上物標距離および頭上物標高さを算出する。その一方で、路面検知手段11,12,14によりレーザ光が路面で反射して路面検知手段に戻るまでの第2の時間と、当該レーザ光が出射された際の出射角である俯角を検知し、路面高さ算出手段15は、第2の時間および俯角に基づいて路面高さを算出する。道路高さ幅算出手段15は、頭上物標高さ、および、路面高さを足し合わせて道路高さ幅を算出する。
(もっと読む)
車両の周辺監視装置
【課題】物体位置特定手段と撮像手段とにおける光軸ずれ量を算出する手段を提供。
【解決手段】レーザレーダ10と、車両の周辺の画像を撮像する撮像手段12と、画像処理ユニット14から構成される。物体位置特定手段141は、レーザレーダ10からの信号により物体の位置を特定する。画像取得手段142は、赤外線カメラ12が撮影した画像をグレースケール画像として取得する。画像上の物体特定手段143は、物体位置特定手段141が特定した物体位置に対応する物体を、グレースケール上で特定する。
この情報に基づいて、光軸ずれを算出する。
(もっと読む)
距離測定装置
【課題】アイセーフ波長のレーザ光を用いて低コストかつ高精度に距離を測定する。
【解決手段】レーザ光源24からのアイセーフ波長のレーザ光は、ポリゴンミラー21により走査されつつ測定対象に照射される。測定対象からの光はGLV32へと導かれ、GLV32からの回折光が光検出器35にて受光される。光検出器35は単一のフォトダイオードを備える。GLV32からは可干渉性の強い光のみが光検出器35へと導かれるため、レーザ光に由来する光のみが光検出器35にて検出される。GLV32において回折光を出射する領域を移動することにより、レーザ光に由来する光の入射位置が求められる。これにより、背景光の影響を受けることなく精度よく距離を測定することができる。また、単一のフォトダイオードを用いることにより、アイセーフ波長の光を低コストにて検出することができる。
(もっと読む)
監視システム
【課題】監視エリア内に存在する物体をより精度高く検出でき、かつ無線通信媒体を有する物体については各物体の具体的内容をより正確に把握し得る監視システムを提供する。
【解決手段】監視システム1は、レーザセンサ100と無線タグリーダ10とを備えており、レーザセンサ100には、レーザ光走査手段と、レーザ光が物体にて反射した反射光を受光する受光手段と、受光手段による受光結果に基づいて物体の方位を検出する検出手段とが設けられている。また、無線タグリーダ10には、可変指向性アンテナ14と、可変指向性アンテナ14の指向性を制御する指向性制御手段と、可変指向性アンテナ14を介して送受信される電波を媒介として無線通信媒体と無線通信を行う無線通信手段とが設けられている。そして、指向性制御手段は、レーザセンサ100での物体の検出結果に基づいて可変指向性アンテナ14の指向性を制御している。
(もっと読む)
認識装置
【課題】横切り車両を対象にした状態認識の精度良く行うこと。
【解決手段】レーダ波の反射点の位置座標(x,y)を取得する(S110)。そして、反射点に対して1線分および2線分をフィッティングする(S120)。次に、1線分、2線分のうち、二乗和が小さい方を選択する(S130)。そして、観測値、車長方向先端位置及び車長方向後端位置を算出し(S140)、算出した車長方向後端位置が、走査範囲の端領域に位置するかを判定する(S150)。車長方向後端位置が端領域に位置すると判定すると(S150NO)、車長方向先端位置を用いた状態認識を行う(S170)。車長方向先端位置は、横切り車両が走査範囲の端に位置していたとしても、精度良く把握できるので、状態認識も精度良く行うことができる。
(もっと読む)
物体認識装置
【課題】車載レーダの反射の検出パターンから車両、モータバイク、自転車、人(歩行者)等を区別して認識する認識精度の向上を図ることができる技術を提供する。
【解決手段】複数フレームのレーザレーダ2による対象物体の反射の検出パターンを重ねてつなぎ合わせることにより、対象物体の輪郭を明りょうに示す合成検出パターンが生成されて、対象物体の形状を明りょうに示す合成検出パターンに基づく、対象物体の形状およびサイズ、自車両1と対象物体との相対位置や相対速度、対象物体の動きのベクトルなどの特徴から、パターン認識が行われて対象物体の種別が識別されるため、物体の形状の一部を示す検出パターンに基づいてパターン認識が行われるのに比べ、レーザレーダ2の反射の検出パターン30から車両、モータバイク、自転車、人(歩行者)等を区別して認識する認識精度の向上を図ることができる。
(もっと読む)
警備システム
【課題】変化する監視エリアに対応しつつ、監視エリアの縮小を招くことなく誤検出を回避する警備システムを提供する。
【解決手段】処理部22は、角度範囲Snごとに定期的に取得される距離データLnを、1日以上の期間的な範囲で記憶部28に蓄積する。処理部22は、蓄積された距離データLnから仮平均値Lnaおよび標準偏差σを算出し、標準偏差が±1σの範囲に含まれる偏差内距離データLnxを抽出するとともに、その範囲外の偏差外距離データLneを蓄積の対象から除外する。処理部22は、偏差内距離データLnxから真平均値Lnarおよび真標準偏差σrを算出し、真平均値Lnarから真標準偏差σrを減じることにより、その角度範囲Snにおける更新済距離データLnrを算出する。そして、処理部22は、この更新済距離データLnrを、更新済監視エリアArの外縁までの距離に設定する。
(もっと読む)
41 - 60 / 201
[ Back to top ]