
Fターム[5L096BA02]の内容
イメージ分析 (61,341) | 入力画像・用途の種類 (5,501) | 特定用途 (3,935) | 監視 (1,053)
Fターム[5L096BA02]に分類される特許
201 - 220 / 1,053
対象物の位置特性の判定
室内の対象物の位置特性を判定するシステムであって、部屋の検出領域のため背景表面に配置された、光学的に識別可能な要素(103)を含むシステムを提案する。カメラ(101)が光学的に識別可能な要素(103)の向かい側に検出領域を横切って配置され、検出領域と光学的に識別可能な要素とを含む画像を取得する。検出器(403)が光学的特性に基づいて画像内の光学的に識別可能な要素を検出する。閉塞プロセッサ(405)が光学的特性に応じて画像内の光学的に識別可能な要素(103)の閉塞特性を判定する。位置プロセッサ(407)が閉塞特性に応じて深さ位置を判定し、その深さ位置はカメラ(101)の光軸に沿った対象物の位置を示す。本発明は例えば室内の人物の存在や大まかな位置測定を可能にしてもよい。 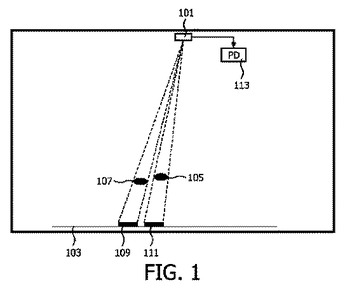 (もっと読む)
(もっと読む)
時系列データに基づいてカメラを方向付けるための方法及びシステム
【課題】時系列データに基づいてカメラを方向付けるためのシステムおよび方法を提供する。
【解決手段】指定されたアトミックアクティビティーの時空間的パターンを与えるステップであって、該時空間的パターンは前記アトミックアクティビティーの時間及びロケーションのみに基づき、それによって前記アトミックアクティビティーの時空間的シーケンスが指定されたプリミティブアクティビティーを形成し、与えるステップと、時系列データにおいて、結果を生成するために、前記時空間的パターンに対応する検知されたプリミティブアクティビティーを検出するステップと、前記結果に基づいてカメラを方向付けるステップとを含む。
(もっと読む)
有害鳥類の数及び停留位置の確定方法及びその確定装置並びに有害鳥類の防除方法

【課題】停留状態の有害鳥類の撮影映像データから必要且つ最小の情報のみを自動的に抽出することで、データの処理工程を簡素化し、これによって処理負荷を大幅に低減し得る有害鳥類の数及び停留位置の確定方法を提供することを目的としている。
【解決手段】停留状態の有害鳥類1を所定時間撮影して得た映像データに、動いている物を消去する消去処理を施して対象データとし、予め作成された停留状態の有害鳥類1の態様を特定した基準データと前記対象データとを照合し、前記対象データ中における前記基準データと同一若しくは近似の態様の有無を確知することで前記停留状態の有害鳥類1の数及び停留位置を確定する有害鳥類の数及び停留位置の確定方法。
(もっと読む)
画像解析装置及びプログラム
【課題】画像から不定期変化領域を抽出することを可能とする。
【解決手段】画像比較部32は、画像格納部22に格納されている画像の各々を比較する。画像比較部32は、比較結果に基づいて、画像格納部22に格納されている複数の画像において変化のある変化領域を算出する。画像比較部32は、画像格納部22に格納されている画像における変化領域を示す座標を、当該画像格納部22に格納する。画像比較部32は、画像格納部22に格納された座標によって示される変化領域に一致する変化領域画像を、画像格納部22に格納されている画像の各々から取得する。画像比較部32は、取得された変化領域画像を比較し、画像格納部22に格納された座標によって示される変化領域が不定期に変化する領域であるか否かを判定する。表示部33は、画像比較部32による判定結果及び画像格納部22に格納された座標をユーザに提示する。
(もっと読む)
画像処理装置及びその制御方法
【課題】動画において、特定の領域の被写体を安定して追尾できるようにする。
【解決手段】動画を構成する1枚の画像において、特定の領域を基準領域として登録し、基準領域内の画素の彩度及び色相の分布をもとに、基準領域の特徴量を設定する。このとき、基準領域内の彩度の平均値が閾値以下であれば、閾値より大きい場合に比べて、基準領域内の色相の分布の分解能が低くなるように特徴量を設定する。そして、基準領域が含まれる画像のフレーム画像において、基準領域の特徴量に該当する位置をマッチング処理によって決定する事により、基準領域を追尾する。
(もっと読む)
動き検出装置
【課題】動き検出の精度を向上させることが可能な動き検出装置を提供すること。
【解決手段】色分離回路41は、入力された映像のRGBデータを色信号に分離する。分割ウィンドウ積算処理回路42は、画面全体を分割した複数のウィンドウのそれぞれに対して色信号レベル検波を行ない、積算パラメータを算出する。減算処理回路24は、分割ウィンドウ積算処理回路42によって算出されたウィンドウごとの積算パラメータの中から、指定されたウィンドウの積算パラメータについて、最新フレームの積算パラメータと1フレーム前の積算パラメータとの減算を行なう。そして、比較器27は、減算処理回路24による減算結果と予め定められた閾値とを比較し、指定されたウィンドウごとに動きがあるか否かを判定する。したがって、動き検出の精度を向上させることが可能となる。
(もっと読む)
映像情報処理方法及びその装置
【課題】 非監視対象の人物にプライバシー保護のための隠蔽処理を施す場合に、予め監視対象人物または非監視対象人物の情報を記録しておく必要があった。
【解決手段】 撮像された空間の画像から複数の人物の各々が存在する複数の人物領域を検出する。検出された複数の人物領域の各々の特徴量を算出し、算出した特徴量と特徴量から求められる統計値を用いて評価値を算出する。複数の人物領域の各々で算出された評価値に合わせて画像加工処理を施す。これにより、各人物が監視対象の空間において平均的な行動または状態から離れた監視対象人物であるか否かの判断を行う。さらに、非監視対象人物に対して、プライバシー保護のための画像加工を行う。
(もっと読む)
監視用画像処理装置
【課題】撮影画像が輝度の低いコントラストの小さい画像であっても、精度良くイベント検知を行うことのできる監視用画像処理装置を得る。
【解決手段】背景差分演算部6は、背景画像と現画像との差分を抽出する。2値化部8は、背景画像と現画像との差分値を2値化する。認識処理部11は、2値化部8で2値化され、特徴量演算部9で特徴量演算された値と特徴量パラメータ設定値10とを比較しイベント発生の有無を検出する。周波数展開部14は、現画像の空間周波数を演算し、周波数要素抽出部15は、所定の周波数要素を抽出する。補正実施部16は、周波数要素抽出部15で抽出された周波数要素に基づいて背景差分演算部6における動作パラメータを補正する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】画面全体からゆらぎ領域を確実に検出でき、監視対象とする物体を精度良く検知することが可能な画像処理装置、画像処理方法及びプログラムを提供する。
【解決手段】一の画像の画像データと、一の画像より過去に撮影された過去画像の画像データの差分を算出する差分処理部と、差分の時間変化を算出し、時間変化の周期性に基づいて、自然界のゆらぎを撮影した部分に相当する画面内のゆらぎ領域と、ゆらぎ領域ではない非ゆらぎ領域を抽出するゆらぎ検出部と、ゆらぎ領域と非ゆらぎ領域に応じて検知精度を変化させて画面内を移動する物体を検知する物体検知部とを備える。
(もっと読む)
侵入物体検知装置
【課題】監視空間内での急激な照度変動が生じても、その照度変動を侵入物体として誤検出することを防止できる侵入物体検知装置を提供する。
【解決手段】侵入物体検知装置1は、監視空間を撮像して監視画像を生成する撮像部10と、複数の監視画像の各画素における画素値の出現確率分布を表す背景モデル、及び背景モデルを代表する画素値を代表画素値として記憶する記憶部23と、監視画像の注目画素の画素値を、注目画素に対応する背景モデルの代表画素値にて置換することにより合成背景画像を生成する背景合成部242と、監視画像の注目画素及び注目画素の近傍に位置する複数の画素を含む局所領域を設定し、局所領域における監視画像と局所領域における合成背景画像の相関値を注目画素の相関値として算出する相関値算出部243と、相関値が所定の閾値以下となる画素に基づいて監視空間に侵入物体が存在するか否かを判定する侵入物体検出部244とを有する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】処理量を低減しつつ、外乱による誤検知を低減し、対象とする物体のみを精度良く検知することが可能な画像処理装置、画像処理方法及びプログラムを提供する。
【解決手段】過去画像を参照して画像内のオプティカルフローを算出するオプティカルフロー算出部と、画像の一部の領域内に複数の基準点を設定し、基準点にオプティカルフローが発生したか否かを検出するオプティカルフロー検出部と、基準点にオプティカルフローが発生したとき、オプティカルフローを発生させた画素データの集合を特徴点として保存する特徴点データ保存部と、特徴点の移動位置を追跡する特徴点追跡部と、特徴点の移動位置の変化に応じて、追跡する特徴点を削除する特徴点削除部と、削除されずに残存した複数の特徴点に基づいて、画像内における物体の通過の有無を判断する通過判断部とを備える。
(もっと読む)
注視判定装置
【課題】運転者の注視対象を自動的かつ的確に判定する。
【解決手段】注視判定装置10は、車両のフロントガラス両端に設けられたピラーよりも左右の外側方向の所定範囲内に対応する顔向き角度の頻度分布を検出する頻度分布検出部22と、所定範囲をピラーから左右のドアミラーに向かう方向の近傍でピラーに接する第1領域と該第1領域よりも左右の外側方向の第2領域とに区分し、頻度分布の検出結果を各第1領域及び第2領域毎に記憶する頻度分布記憶部23と、第1領域にて頻度分布が最大となる顔向き角度と第2領域にて頻度分布が最大となる顔向き角度との中間角度を検出する中間角度検出部25と、顔向き角度が各ピラーに対応する角度と中間角度との間の角度範囲に存在する場合には、注視対象がドアミラーであると判定する注視対象判定部26とを備える。
(もっと読む)
マスク着用判定装置
【課題】ひとがマスクを着用しているか否かを精度良く判定する。
【解決手段】マスク着用判定装置10は、乗員カメラ11から出力された顔画像において水平エッジを抽出する水平エッジ抽出部21と、水平エッジの抽出結果のうちから、輝度値判定部22により水平エッジの輝度値が第1輝度値以上であると判定され、かつ、水平エッジの水平方向長さが所定値以上または水平エッジの鉛直方向高さと水平方向幅との比が所定比以下である水平エッジを選択する水平エッジ選択部23と、選択された水平エッジよりも上下方向下方の所定領域の輝度値が第2輝度値以上である場合に、ひとがマスクを着用していると判定するマスク着用判定部24とを備える。
(もっと読む)
画像処理装置および混雑検知処理プログラム
【課題】カメラで撮影した画像を順次入力し、入力した現在画像と過去画像から混雑度を検知する混雑検知処理手段を備えた画像処理装置において、信頼性の高い混雑度の検知機能を実現する。
【解決手段】画像処理部13は、カメラ11で撮影した画像を順次入力し、入力映像の状態によって輝度の変動状況を調査し、安定状態、流動状態、混雑状態の3状態を判定することで、混雑検知を行う。
(もっと読む)
不審行動検知方法および不審行動検知装置
【課題】多様で複雑な行動パターンの監視対象においても客観的な基準でより信頼性の高い不審行動の検知を行うことのできる不審行動検知方法および不審行動検知装置を提供する。
【解決手段】カメラ11から入力される画像内の人物を追尾する追尾部21と、追尾中に、その追尾中の人物の動作が予め定めた基本動作らしさの度合いを示す信頼度を、複数種類の前記基本動作のそれぞれについて繰り返し導出する信頼度導出部25aと、導出された基本動作毎の信頼度を時系列にした基本動作信頼度時系列データを記憶する記憶部22と、記憶されている基本動作信頼度時系列データに基づいて、追尾している人の行動が不審行動であるか否かを判定する不審判定部25cとを有する。
(もっと読む)
追跡方法、監視システム及びプログラム
【課題】追跡方法、監視システム及びプログラムにおいて、追跡対象が周辺領域に影響を及ぼす場合であっても安定した追跡を行うことを目的とする。
【解決手段】監視領域内の複数の箇所で前記監視領域内の領域を撮影するカメラからの画像データに基づいて、追跡対象の位置を推定した推定結果の分布を用いて前記追跡対象の存在確率を表す第1の多値化画像データを生成し、前記カメラからの画像データに基づいて、前記追跡対象らしさの度合いを表す第2の多値化画像データを生成し、前記第1の多値化画像と前記第2の多値化画像を比較し、比較結果に基づいて前記推定結果を評価して前記推定結果を再構成することで前記追跡対象を追跡し、前記第1及び第2の多値化画像は、いずれもn≧3(nは自然数)を満たすn値化画像である。
(もっと読む)
追尾装置
【課題】追尾する目標物の特徴抽出処理を実行することなく、入力画像において目標物と他の物体とが一時的に重なる状況が発生しても、他の物体のリファレンス画像内への取り込みを抑えることができ、相関処理精度及び追尾精度を向上させることができる追尾装置を提供する。
【解決手段】リファレンス画像生成部9は、フレーム毎に動的にリファレンス画像を生成する。リファレンス画像生成部9は、目標領域蓄積部8に蓄積されている複数フレームの目標領域を取得する。リファレンス画像生成部9は、目標領域におけるフレーム間の輝度の変化を監視する。リファレンス画像生成部9は、フレーム間の輝度変化が小さい画素を、目標物を構成する画素であると判断して、現時点の次のフレームのリファレンス画像を生成する。
(もっと読む)
物体検出装置及び物体検出プログラム
【課題】照明環境及び姿勢変動等に起因するアピアランス変動、並びに複雑な背景下等での環境変動に対してロバストな物体検出を行う。
【解決手段】映像中の変化領域及び非変化領域を用いて学習部6が生成した変化対象検出器7を前段として用い、アピアランス変動及び環境変動にロバストな検出対象の候補領域抽出を実現し、後段として、事前学習した物体検出器10を組み合わせ、最終的に、対象尤度算出部9が変化対象検出器7を用いて算出した対象尤度と、対象尤度算出部11が物体検出器10を用いて算出した対象尤度を組み合わせた結合尤度を用いて結合尤度判定部13が閾値判定して物体検出を行う。
(もっと読む)
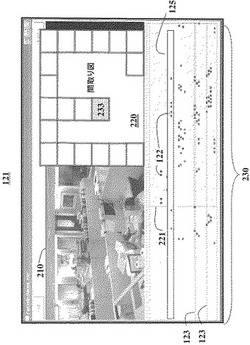
計数プログラム、計数装置および計数方法
【課題】不特定多数の移動体の中から所定の移動体を特定して、正確な数量を計数すること。
【解決手段】計数装置100は、カメラ110によって対象領域を撮影して画像111を得る。そして計数装置100は、カメラ110から得られた画像111を利用して、所望する形状の移動体(図1の場合は、ベビーカーを伴った乗客)の有無を判断する。また、計数装置100は、画像111から所望する移動体が検出された場合には、さらに、検出された移動体の位置関係に応じて、移動体の種別(図1の場合、上り用レーン/下り用レーンのいずれに並んでいるか)を特定する。したがって、計数装置100は、エレベータ待ちの乗客のうち、ベビーカーを伴った乗客が、上り用・下り用ごとに何人いるかを正確に計数することができる。
(もっと読む)
画像処理装置および画像処理方法
【課題】軽演算負荷の画像処理によって動体の時間方向の情報を高精度に導出する。
【解決手段】画像処理装置110は、任意の画像のフレーム間の差分を用いて、動体112の移動軌跡をグラデーションで表すモーションヒストリーイメージを生成するMHI生成部212と、生成されたモーションヒストリーイメージを所定の大きさの小ブロックに分割するブロック分割部214と、分割された小ブロックにおける動体の水平方向および垂直方向の移動速度に相当する特徴量を小ブロック毎に導出する特徴量導出部216と、特徴量から動体の動きベクトルを導出する動きベクトル導出部218と、を備える。
(もっと読む)
201 - 220 / 1,053
[ Back to top ]