
Fターム[5L096BA02]の内容
イメージ分析 (61,341) | 入力画像・用途の種類 (5,501) | 特定用途 (3,935) | 監視 (1,053)
Fターム[5L096BA02]に分類される特許
161 - 180 / 1,053
画像監視装置
【課題】強盗に拘束され床面に横たわりながら、体を多少動かす被害者を検出し、通報する画像監視装置を提供する。
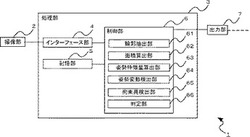
【解決手段】画像監視装置1は、画像から人物が写っている領域の輪郭を抽出する輪郭抽出部61と、輪郭上に複数の特徴点を設定する特徴点設定手段631と、複数の特徴点のそれぞれについて、その特徴点と異なる他の特徴点のそれぞれに対して、その特徴点からの距離、及びその特徴点と他の特徴点とを結ぶ線分が他の特徴点における輪郭に基づいて定められた基準線となす角度を姿勢特徴量として算出する姿勢特徴量算出部63と、姿勢特徴量の時間的変化から人物の横臥状態での姿勢の変動を検出する姿勢変動検出部64を有する。
(もっと読む)
置き去り又は持ち去り判定装置及び同判定方法

【課題】背景画像と現在画像を差分して得られる差分(異物)画像が置き去りによるものか持ち去りによるものかを判定する。
【解決手段】電子カメラ10で撮影した監視区域の背景画像に基づき、判定装置20の距離画像作成手段201は前記背景画像の距離画像を作成し、記憶装置22は前記背景画像及び作成した距離画像を記憶する。差分画像作成手段202は、前記背景画像と現在画像との差分画像を作成し、置き去り又は持ち去り判定手段203は、前記距離画像と前記差分画像を重ね合わせ、前記距離画像における差分画像と重なった部分と同じ画素ライン上にある重ならない部分との距離データを比較して、差分画像が置き去りによるものか持ち去りによるものかを判定する。
(もっと読む)
不審者検知装置
【課題】押込強盗等の不審者を高い精度で検知できる不審者検知装置を提供する。
【解決手段】所定領域内の画像を順次取得する撮像部と、画像から検出した人物像ごとに画像上にて追跡し各人物像の位置情報を順次出力する追跡部と、不審者の存在を検知する検知部と、不審者の存在を検知すると警報出力する出力部とを有する不審者検知装置において、検知部は、追跡部にて複数の人物像を検出しているならば、当該複数の人物像のうち第一の人物像と他の第二の人物像との相対的な位置関係である相対位置を算出する相対位置算出手段と、相対位置が所定時間にわたって略一定であるとき不審者が存在しているとする判定手段とを有することを特徴とした。
(もっと読む)
煙検出装置
【課題】不規則に流動する煙の検出精度の向上を図ることのできる煙検出装置を得る。
【解決手段】煙特徴量算出手段(30)と、所定の判定基準値を記憶する記憶部(20)と、煙特徴量算出手段により抽出された特徴量と基準判定値との比較結果に基づいて、煙が発生した可能性が高い候補領域を特定する煙判定手段(40)とを備え、候補領域の時系列データに基づいて、候補領域の面積に関する時系列第1データ、面積の重心座標に関する時系列第2データ、および時系列第1データの候補総和領域の面積と候補領域のそれぞれの面積との面積比に関する時系列第3データを求め、時系列第2データおよび時系列第3データに基づく統計量が許容統計量の範囲内にある場合には、候補領域で流動煙が発生していると判定する流動煙判定手段(50)をさらに備える。
(もっと読む)
顔画像処理装置
【課題】入力された顔画像の顔向きを正確に推定する顔画像処理装置および入力顔画像の照合精度を向上させた顔画像処理装置を実現する。
【解決手段】入力顔画像中の人物の顔向きを推定する顔画像処理装置が提供される。かかる顔画像処理装置は、複数の登録人物のそれぞれに対応した互いに異なる顔向きの登録顔画像を記憶する記憶部と、登録顔画像のそれぞれと入力顔画像との類似度を算出する類似度算出手段と、算出された類似度が所定以上の登録顔画像に対応する顔向きに投票する顔向き投票手段と、顔向き投票手段により最も多く投票された顔向きを入力顔画像の顔向きであると推定する顔向き決定手段と、を有するように構成する。
(もっと読む)
移動物体検出装置及び方法、並びにプログラム
【課題】誤検出を低減し、充分な検出精度を得られることができるようにする。
【解決手段】 画像入力処理部11は、解析画像のデータを入力し、解析画像内で指定領域を設定する処理を実行する。ヒストグラム相関判定処理部14、伸縮ヒストグラム相関判定処理部15、及び正規化相互相関判定処理部16には、設定された指定領域を移動する移動物体の像の有無を判定する判定手法として相異なるものをそれぞれ適用し、適用した判定手法に従って移動物体の像の有無を判定する。結果統合部17は、これらの判定結果のうち任意の数の任意の種類を統合することによって、移動物体の像を検出する。本発明は、監視カメラに適用することができる。
(もっと読む)
オブジェクト判定装置
【課題】背景差分処理で人物を検出・追跡を行う場合に、人物が一定時間以上静止して背景として溶け込んでも追跡を続けることができ、また部屋からの退出など人物が実際に居なくなっても正常に機能するオブジェクト判定装置を提供する。
【解決手段】オブジェクト領域抽出部5が、連続して入力された画像からオブジェクトを含む領域であるオブジェクト領域を抽出し、静止判定部6が、オブジェクト領域抽出部5により抽出されたオブジェクト領域の静止判定を行い、前景割合変化検出部7が、静止判定部6により静止と判定されたオブジェクト領域内における、連続して入力された画像の前景割合変化を検出し、判定部8が、前景割合変化検出部7により検出された前景割合変化に基づきオブジェクトの有無の判定を行う。
(もっと読む)
学習装置及び対象物検知装置
【課題】画像に基づく対象物検知装置において、隠蔽に対応するために対象物の部位を検出する場合、設定する部位の大きさに応じた識別性能と隠蔽耐性とトレードオフの関係から一部隠蔽状態での高精度の検知が難しい。
【解決手段】検知記憶部12は、部位情報120として、予め学習により設定された、部位の情報を記憶する。部位検出部141は、入力画像の各位置において部位情報と対応する部位の有無を識別し、部位があると識別された位置を出力する。対象物判定部142は当該出力された位置が閾値以上集中しているときに対象物を検知する。部位は、識別率が目標値を超える最小の大きさに設定される。
(もっと読む)
画像処理システム及び画像処理方法
【課題】テンプレート・マッチングのような画像処理に要する最大処理時間を短縮することが可能な画像処理システムを提供する。
【解決手段】画像処理システムは、探索対象画像の中からテンプレート画像と一致する一致領域を探索する。操作処理部501と、抽出処理部502と、計算処理部503と、特定処理部504とを具備する。操作処理部501は、連続した複数の第1ビットの各々を順次操作して、不連続な複数の第2ビットの各々を順次生成する。抽出処理部502は、順次生成される第2ビット毎に、探索対象画像の中の連続的な探索順の位置のうち、第2ビットに対応した探索位置で部分領域を抽出する。計算処理部503は、抽出された部分領域とテンプレート画像との類似性に関する指標を算出する。特定処理部504は、複数の第2ビットに対応した複数の部分領域について算出された複数の指標に基づいて、複数の部分領域から一致領域を特定し、一致領域の位置としての合致位置を特定する。
(もっと読む)
対象物検知装置
【課題】画像監視装置において、隠蔽に対応するために検知対象物の部位を検出する場合、部位の検出効率と検出結果の信頼性との間にトレードオフの関係が生じる。
【解決手段】個々は対象物体像に応じた形状の枠領域内にて一部範囲を占め、位置が異なる複数種類を設けることにより当該枠領域の各所に配置される部位として、個々の大きさが異なる複数種類のものを設定する。部位ごとに検出器を設け、入力画像の対比部分が当該部位における対象物体像と一致するかを検出する。一致した部位にはその大きさに応じた投票値を設定する。同じ枠領域に属する部位について投票値を集計して、集計値が閾値を超える場合に対象物が存在すると判定する。
(もっと読む)
対象物認識システム及び該システムを利用する監視システム、見守りシステム
【課題】どのような状況にあっても安定的に高精度な背景を得ることができ、照明変動や遮蔽等の影響を受けても検出に失敗することのない認識システム、監視システム、見守りシステムを提供する。
【解決手段】一定時間内、監視領域及び/又は見守り領域を観測し、得られたデータから対象物領域を抽出し、人の姿勢、動作、動きを認識する手段として人の体を各部分に対応して分割するマルチスリット法及び/又はバウンディングボックスをサブバウンディングボックスに分割するサブバウンディングボックス法を用いて解決する。
(もっと読む)
移動物体検出装置及び方法、並びにプログラム
【課題】夜間など暗い場所でも充分な検出精度を得ることができるようにする。
【解決手段】 画像入力処理部11は、解析画像のデータを入力し、解析画像内で指定領域を設定する処理を実行する。近距離検出処理部12は、設定された指定領域を移動する、監視カメラからの第1の範囲の距離の移動物体の像を検出し、遠距離検出処理部13は、設定された指定領域を移動する、監視カメラから第1の範囲より遠い第2の範囲の距離の移動物体の像を検出する。また、遠距離検出処理部13は、第2の範囲の距離の移動物体の像を検出する際の処理手法として、動きベクトルを用いて移動物体の有無を判定する動きベクトル判定と、過去の画像との相関を用いて移動物体の有無を判定する相関判定とを選択的に切り替えて使用する。本発明は、監視システムに適用することができる。
(もっと読む)
対象物検知装置及びその学習装置
【課題】対象物の画像に現れる複数の特徴点についての投票結果から対象物を検知する対象物検知装置において、特徴点のばらつきやすさによる投票の格差が生じ高精度の検知が難しい。
【解決手段】検知記憶部12は、特徴点情報120として、対象物体像における特徴点分布の情報と、特徴点分布の代表位置からの基準点の相対位置とを記憶する。投票部141は入力画像において、特徴点の検出位置に対する相対位置に設ける相対基準点に代表位置が一致するように移動させた特徴点分布に応じて、入力画像の各位置における特徴点の投票値を求める。対象物判定部142は入力画像の各位置における各特徴点の投票値の集計値が所定の検知閾値を超え、かつ極大となる点に基づいて、入力画像内における基準点の位置を求め、当該位置に前記対象物体像が存在すると判定する。
(もっと読む)
対象物認識システム及び該システムを利用する監視システム、見守りシステム
【課題】監視領域や見守り領域を観測し、得られたデータから対象物領域を抽出したときに、複数の対象物領域が重なりあう又は近距離に位置することにより1つの対象物領域として統合認識されている場合や部分的なデータ欠落により同一対象物が複数の対象物領域に分離されている場合には、認識が困難になる問題を解決する認識システム、監視システム、見守りシステムを提供する。
【解決手段】抽出された対象物がフレームに出現する出現時刻及び/又は統合前の複数の対象物領域と統合後の対象物領域の領域パラメータの相関度に基づいて、複数の対象物領域を独立した別の対象物領域として分離する手段と、対象物領域がフレームに出現する出現時刻及び/又は分離前の対象物領域と分離後の複数個の対象物領域の領域パラメータの相関度に基づいて、分離された対象物を同一の対象物領域であると認識する領域統合手段を備える。
(もっと読む)
動体検出装置および方法
【課題】背景領域における動体の誤検出を抑制する。
【解決手段】2つの入力画像の相対的な位置ズレを解消するように,2つの入力画像の一つに他の一つの位置が合わせられる。位置合わせの2つの入力画像に残存する残存位置ズレ量が算出され,残存位置ズレ量が所定の閾値dよりも大きければ解像度Aとなるように,所定の閾値d以下であれば解像度Bとなるように,2つの入力画像の解像度が下げられる(解像度A<解像度B)。下げられた解像度の入力画像が用いられて2値差分画像データが生成され,2値差分画像データによって表される2値差分画像から動体領域が検出される。
(もっと読む)
画像監視装置および監視システム
【課題】 監視領域において物品の置き去りと持ち去りのどちらが発生したのかを判別することのできる画像監視装置を提供する。
【解決手段】 画像監視装置2は、監視カメラ3で監視領域を撮影した画像に基づいて、監視領域における物品の置き去りまたは持ち去りを検出する。この場合、まず、監視領域を撮影した画像(入力画像)と、予め監視領域を撮影した画像(基準画像)の差分から、入力画像に含まれる変動領域を抽出する。そして、入力画像の変動領域や基準画像の対応領域の内外で連続する線分(特定線分)を抽出し、特定線分が入力画像と基準画像のいずれの画像で検出できたのかに基づいて、監視領域において物品の置き去りと持ち去りのどちらが発生したのかを判定する。
(もっと読む)
対象物認識システム及び該システムを利用する監視システム、見守りシステム
【課題】どのような状況にあっても安定的に高精度な背景を得ることができ、照明変動や遮蔽等の影響を受けても検出に失敗することのない認識システム、監視システム、見守りシステムを提供する。
【解決手段】基本的には多数決論理によるが、観測手段により背景を反映する背景パラメータと対象物の存在位置を反映する存在位置パラメータを取得し、背景パラメータが所定の範囲内に所定の閾値以上で存在するかを判定し、存在すればその背景パラメータを背景候補領域を示すパラメータとして設定し、かつ、存在位置パラメータが所定の範囲内に所定の閾値以上で存在するかを判定し、存在すればその存在位置パラメータを対象物候補領域を示すパラメータとして設定する。
(もっと読む)
対象物認識システム及び該システムを利用する監視システム、見守りシステム
【課題】セグメンテイション及び位置推定精度の向上を図ることができ、結果として姿勢・動作の認識精度も向上し、より信頼性の高い異常事態発生の検知が可能な対象物の認識システム、監視システム、見守りシステムを提供する。
【解決手段】本発明の対象物の認識システムは、対象物の1次元データを取得する1次元センサーと、対象物の2次元データを取得する2次元センサーと、対象物の3次元データを取得する3次元センサーの少なくとも2つ以上を含む同種又は異種の複数の観測手段と、上記観測手段から得られる1次元データ、2次元データ、3次元データを対応付けて対象物を認識する認識手段を備える。
(もっと読む)
監視カメラ端末
【課題】他の監視カメラ端末との間で、追跡している人物の同定精度を十分に確保し、且つ、コストアップも十分に抑えられる監視カメラ端末を提供する。
【解決手段】隣接する2つの監視カメラ端末1は、撮像エリアの一部が重複している。監視カメラ端末1は、自端末で撮像したフレーム画像における人物の位置、および隣接する他の監視カメラ端末1で撮像したフレーム画像における人物の位置を、それぞれ共通の座標系の位置に変換する。そして、人物間の足元位置の距離により、重複エリアに位置する人物X、Yを1対1で対応付ける同定を行う。また、人物の足元が撮像されていないときには、その人物について、性別や年齢等の属性を用いて推定した推定身長を用いて、足元の位置を推定する。
(もっと読む)
動体検出装置と動体検出方法およびプログラム
【課題】動体までの距離や動体の移動速度にかかわらず安定して動体を検出できるようにする。
【解決手段】検出処理部34で、現画像と過去画像を用いて算出した動きベクトルに基づき動体検出を行う。検出結果処理部35は、検出処理部34の動体検出処理部34S,34M,34Lのいずれかで動体が検出されたとき、動体が検出されたことを出力する。動体検出処理部34S,34M,34Lは、現画像と過去画像の解像度と、現画像と過去画像との時間間隔と、動きベクトルの探索範囲の少なくともいずれかを相違させることで、動体の遠近状態や移動速度に対する動体検出特性を互いに異なる特性とする。検出処理部34は、動体までの距離や動体の移動速度にかかわらず安定して動体を検出できるようになる。
(もっと読む)
161 - 180 / 1,053
[ Back to top ]