
Fターム[5L096BA02]の内容
イメージ分析 (61,341) | 入力画像・用途の種類 (5,501) | 特定用途 (3,935) | 監視 (1,053)
Fターム[5L096BA02]に分類される特許
81 - 100 / 1,053
評価支援装置および評価支援システム
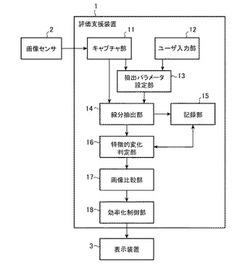
【課題】物体の存在度合いを定量的に評価し、当該評価に応じた安全化支援および効率化支援を行う。
【解決手段】画像データから物体の線分情報を抽出する線分抽出部14と、入力された画像データの線分情報と、記録部15に記録された画像データの線分情報とを比較し、線分情報の変化を検出する特徴的変化判定部16と、入力された画像データと記録部15に記録された画像データを参照して、特徴的変化判定部16が検出した線分情報の変化の発生箇所を特定する画像比較部17と、特徴的変化判定部16が検出した線分情報の変化について定量的評価を行うと共に、当該定量的評価と画像比較部17が特定した線分情報の変化の発生箇所とを表示装置3に表示する効率化制御部18とを備えた。
(もっと読む)
部位認識装置、部位認識方法、及び部位認識プログラム

【課題】映像や画像に含まれる人物の部位等を高精度に認識する。
【解決手段】映像又は画像に含まれる人物の部位を認識する部位認識装置において、前記映像又は画像に含まれる少なくとも1人の人物の人体領域を検出する人体領域検出手段と、前記人体領域検出手段により得られる人体領域から所定の部位を認識する部位認識手段とを有し、前記部位認識手段は、前記人体領域検出手段により得られる人体領域の画像のうち、予め設定された形状と一致する領域を、前記形状に対応して設定された前記所定の部位として認識することにより、上記課題を解決する。
(もっと読む)
置去り/持去り物体検知装置及び置去り/持去り物体検知方法
【課題】置去り/持去り事象を精度良く判別することができる置去り/持去り物体検知装置及び置去り/持去り物体検知方法を提供する。
【解決手段】背景データ生成部12は、過去の情報の量が異なる2つの背景画像データを生成するとともに、過去の情報の量が異なる2つの背景距離データを生成し、置去り/持去り領域検出部13は、過去の情報の量が異なる2つの背景画像データを比較することにより、一定時間以上変化の継続した領域を検出し、置去り/持去り事象判定部14は、置去り/持去り領域検出部13で検出された領域に対して、過去の情報の量が異なる2つの背景距離データの比較を行い、置去り事象であるか、持去り事象であるかの判定を行う。このように、過去の情報量の異なる2種類の背景画像データ、背景距離データを生成することで精度の良い置去り/持去り検出が可能となる。
(もっと読む)
侵入物体の検知を行うことができる物体追尾装置、物体追尾方法及び記憶媒体
【課題】追尾対象体が追尾されている画像データの画像フレームに侵入物体が侵入したことを検出することのできる物体追尾装置を提供する。
【解決手段】追尾対象である被写体を追尾対象体として追尾する物体追尾装置は、動画像データにおける現フレームよりも前の前フレームにおいて追尾対象体の位置を示す前フレーム対象領域又は前記現フレームにおいて追尾対象体の位置を示す現フレーム対象領域に、複数のサブ領域を設定し、当該サブ領域毎にその特徴量を求める特徴量算出部104と、特徴量が第1の閾値を超えるサブ領域が存在し、かつその数が基準値に達していなければ、現フレームにおける追尾対象体が位置する領域に、追尾対象体と異なる侵入物体が侵入したと判定する侵入物判定部105とを有し、侵入物判定部105は追尾対象体の像領域に侵入物体が侵入したか否かを判定する。
(もっと読む)
把持物体認識装置、把持物体認識方法、及び把持物体認識プログラム
【課題】撮影等により得られた映像や画像に含まれる人物が把持する把持物体等を高精度に認識する。
【解決手段】映像又は画像に含まれる人物が把持している物体を認識する把持物体認識装置において、前記映像又は画像に含まれる少なくとも1人の人物の人体領域を検出する人体領域検出手段と、前記人体領域検出手段により得られる人体領域から手先領域を検出する手先検出手段と、前記手先検出手段により得られる手先領域に対応した手先の位置情報に基づいて、把持物体を検出する把持物体検出手段とを有することにより、上記課題を解決する。
(もっと読む)
侵入監視装置及び侵入監視方法
【課題】カメラに映った人や車両の混雑をカメラへの監視妨害などの事象として誤検知することなく、精度良くカメラ妨害検知が可能な侵入監視装置を提供する。
【解決手段】動物体検知部22の検知結果を基に小領域ごとに単位時間当たりの検知数を測定して人通りの多少を推定する動物体存在領域推定部23と、基準画像生成部21で生成された基準画像を基に明るさ変動に頑健な特徴点が多く存在する領域を選定する特徴量有効領域選定部24とを備え、撮像部1への妨害検知判定領域を動的に選定するようにした。これにより、カメラに映った人や車両の混雑をカメラへの監視妨害などの事象として誤検知することなく、精度良くカメラ妨害を検知することができる。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】画像の正規化による妨害行為の誤検出及び検出漏れを抑制することができるようにする。
【解決手段】取得された画像は画像分割部63により分割され、更新領域選択部61により更新対象として選択されたブロックのヒストグラムがヒストグラム生成部64により生成される。ヒストグラム保存部62は生成されたヒストグラムを順次更新して保存する。正規化処理部65は、ヒストグラムを正規化するか否かを判定する。変化判定部66は、ヒストグラム生成部64により生成されたヒストグラムと、ヒストグラム保存部62に保存されている過去のヒストグラムの類似度を演算し、その演算結果に基づいて、取得された画像の変化を判定する。本発明は、例えば、監視システムに適用できる。
(もっと読む)
車両用画像処理装置および車両用画像処理方法
【課題】カメラにより取得された画像から路面の位置を求める。
【解決手段】車両用画像処理装置10は、記憶部13、路面検出部27、近似平面作成部31および路面データ更新部32を備える。記憶部13は、設定路面上の点についてカメラ座標系における画像上の座標値と光軸方向座標値とを関連付けた路面データを記憶する。路面検出部27は、スケールファクタつき相対並進成分と自車の並進成分とを用いてカメラ座標系における対象物の光軸方向座標値を算出するとともに、路面データにおいて対象物の画像上の座標値と関連付けられた光軸方向座標値を記憶部13から取得し、これらの光軸方向座標値の差が所定の路面閾値以下であると対象物を路面と判定する。近似平面作成部31は、複数の対象物のなす近似平面を表す式を立て、この近似平面上の点について近似平面データを求める。路面データ更新部32は、記憶部13の路面データを近似平面データで更新する。
(もっと読む)
画像監視装置
【課題】監視領域内の監視画像を処理し、監視領域内の異常状態の発生、特に強盗犯が従業員等の被害者を拘束する行為を検出する画像監視装置を提供する。
【解決手段】撮像部から順次取得された監視画像を処理して異常を判定する画像信号処理部と、画像信号処理部が異常を判定すると警報出力する警報部とを有する画像監視装置において、画像信号処理部は、背景画像と監視画像との差分2値化画像から変化領域を算出する変化領域検出手段と、変化領域として検出された差分2値化画像について床面軸に垂直方向に投影した投影ヒストグラムを求め、当該投影ヒストグラムが上に凸上の2つのピークを有する場合に異常と判定する判定手段を有する。
(もっと読む)
侵入者監視装置、異物実体画像の識別方法、及びプログラム
【課題】
侵入者監視装置において、監視領域内に映り込んだ影による誤報を防止することである。
【解決手段】
背景画像と監視画像との差分画像における異物画像から異物の有無を検知する異物検知手段31と、前記監視画像における輝度勾配が所定の値以上であるエッジ位置を特定するエッジ位置特定手段33と、前記差分画像における前記エッジ位置に相当する位置により挟まれた前記異物画像部分から、前記異物の実体画像を構成する実体画像識別手段34とを有する。
(もっと読む)
混雑度推定装置
【課題】現在と過去における列車の運行状況および人の動きの変化パターンを考慮して、混雑が正常か異常かといった混雑度を推定する混雑度推定装置を提供する。
【解決手段】混雑度推定装置は、移動体の到着する地点付近の映像データを取得する撮像部101と、移動体の到着を検知する移動体検知部103と、映像データを処理して人物の流れを計測する人流計測部105と、人流計測部105の計測結果から典型的な時系列の変化を表したパターンデータを抽出してパターンデータベース111に保存する解析部107と、移動体の運行予定情報と人流計測部105の処理結果およびパターンデータを参照して混雑度を判定し、移動体または移動体到着地付近の混雑度が正常かあるいは異常かを表示する。
(もっと読む)
画像処理装置
【課題】背景の影響を除去して高精度に煙状の物体を検出する。
【解決手段】ステレオカメラの撮像画像を処理する画像処理コントローラと、画像処理コントローラからの情報に基づいて物体の認識処理を行う認識処理コントローラとを基本構成とする画像処理装置において、認識処理コントローラに、煙状の物体を認識可能とするための機能として、対象物領域特定部20a,特徴量抽出部20b,煙判定部20cを備える。対象物領域特定部20aは背景の影響を除去して検出対象となる物体の領域を特定し、特徴量抽出部20bは対象物領域内で煙状の物体を認識するための画像特徴量を抽出し、煙判定部20cは抽出した画像特徴量から対象物領域内の物体が煙状の物体であるかそれ以外の物体であるかを判定する。
(もっと読む)
画像処理装置及び画像処理方法
【課題】 背景差分法により撮影画像から異物を検出する動作を安定化すること。
【解決手段】 差分画像を閾値処理で2値化し(S103)、異物と異物以外(ノイズ)とを判別した後、該閾値を画素毎に調整する(S104)。この閾値は、撮影環境で生じるノイズの大きさに応じて予め定められた閾値TH1と閾値TH1よりも所定値だけ低い閾値TH2との間で閾値を切り替え可能とする。上記所定値は、実測するノイズの変動量を基づいて決める。閾値調整(S104)では、初期の閾値TH1で異物が判別された場合に、閾値TH2値に調整し、その後、引き続いて行う閾値TH2による2値化処理で異物と判別されなくなったときに再び閾値TH1に戻す閾値調整を画素毎に実行し、この調整によって、発生するほとんどのノイズの影響を受けることがなく、異物検出動作が不安定になることを防ぐことができる。
(もっと読む)
車両用画像処理装置および車両用画像処理方法
【課題】自車の曲進および振動による影響を考慮して対象物との衝突可能性を判定する車両用画像処理装置および車両用画像処理方法を提供する。
【解決手段】車両用画像処理装置において、カメラ11は、車両の周辺を撮像する。動きベクトル算出部21は、カメラ11により撮像された複数の画像間の動きベクトルを求める。スケールファクタ付き並進成分算出部23は、画像に含まれる対象物に対応する動きベクトルと車両の回転成分とにもとづいて、スケールファクタ付き並進成分を算出する。z位置取得部26は、カメラ座標系における対象物の光軸方向座標値を取得する。衝突判定部25は、カメラ11の中心から対象物までの距離を時間の関数としてあらわした式にもとづいて、カメラ11の中心から対象物までの最近接距離が所定の距離以下であるか否かを判定する。衝突危険度判定部28は、最近接距離が所定の距離以下であると、車両と対象物が衝突すると判定する。
(もっと読む)
姿勢状態判定装置
【課題】対象者の姿勢状態を高精度に判定することが可能な姿勢状態判定装置を提供することを目的とする。
【解決手段】本発明の姿勢状態判定装置は第1方向から対象者を含む画像を撮像する撮像部と、前記画像から前記対象者の像の大きさと、前記撮像部の撮像領域における前記対象者の位置情報とを検出する検出部と、前記撮像部の撮像領域の高さ情報を入手する入手部と、前記検出部の検出結果と前記入手部により入手した前記高さ情報とに基づいて前記対象者の姿勢状態を判定する判定部と、を備えた姿勢状態判定装置である。
(もっと読む)
移動物体追跡装置
【課題】監視空間内の移動物体を時刻毎に生成した複数の予測位置に基づいて追跡する装置において、移動物体の現時刻での予測位置が監視空間内の障害物の領域に設定されると追跡精度が劣化する。
【解決手段】予測位置設定部は記憶部に記憶される過去の位置情報を用いて動き予測を行い、移動物体の現時刻における複数の予測位置を求める。その際、予測位置修正部53は、複数の予測位置のうちその移動元となる1時刻前の予測位置220との間に障害領域42aが存在する予測位置221を移動元位置から見て障害領域42aより手前の位置の予測位置241に修正する。物体位置算出部56は、修正された予測位置を含む複数の予測位置それぞれにて有する移動物体の画像特徴に基づいて、移動物体の現時刻における移動先位置を判定する。
(もっと読む)
測定対象物計数器および測定対象物を計数するための方法
【課題】本発明は、測定対象物計数器および測定対象物を計数するための方法に関する。
【解決手段】本方法は、所定の計数ビューの移動する画像を表す画像を取り込むステップと、所定の計数ビューの移動する画像内の移動領域を検出するステップと、移動領域の動きの速度を指し示す移動領域速度値を計算するステップと、所定の計数境界や、移動領域速度値や、寄与時間間隔dtに基づいて寄与ゾーンを繰り返して規定するステップと、規定した寄与ゾーン内に含有される移動領域の面積のサイズを表すサブ面積値を繰り返して取り出し、記録するステップと、複数の記録したサブ面積値を足し算することによって合計面積値を生成するステップと、合計面積値を基準測定対象物面積値で割り算することによって計数境界を通過した測定対象物の数を推定するステップとを備え、前記寄与時間間隔が、サブ面積値を取り出す2つの連続した行為間の時間間隔に対応する。
(もっと読む)
対象物画像判定装置
【課題】三次元空間での対象物の像の存在を判定する対象物画像判定装置において、撮像される画像毎に投影処理を行い設置物による非隠蔽部分を求めるのは処理負荷が大きい。
【解決手段】時刻毎に画像から対象物像を抽出する動作に際し事前処理を行い、空間内での対象物の位置のうち画像において対象物が設置物により隠蔽される隠蔽位置を特定した隠蔽マップ42、カメラへの投影条件に基づいて設置物、及び空間内の各位置での対象物それぞれの立体モデルを投影した設置物モデル像44、対象物モデル像43を求め、記憶部4に格納する。隠蔽状態推定部54は、隠蔽マップ42を参照し、対象物の候補位置が隠蔽位置であれば当該候補位置に対応する対象物モデル像43から設置物モデル像44の領域を除いて対象物可視領域とする。尤度算出部55及び物体位置算出部56は、画像における対象物可視領域の画像特徴から対象物の像の存在を判定する。
(もっと読む)
通行車両監視システム
【課題】道路上の通行車両を正確に認識し、設置が容易で、かつトンネル内にどのような車両が存在するのかを把握することができる通行車両監視システムを提供する。
【解決手段】通行車両監視システム1は、数珠繋ぎに接続され、車両の通行状況を撮像する複数の監視カメラ2と、その複数の監視カメラに接続されたセンタ装置4とからなる。 各監視カメラ2は、複数の撮像部21と、複数の画像から距離画像のデータを生成する立体計測部23と、基本監視部24と、メモリ27と、識別情報と、車両についての時刻情報とを含む情報を前記記憶部に記録する計測及び記録処理部と、追加監視部25を有し、センタ装置4は、車両の画像から認識された所定の標章についての標章情報を、距離画像に基づいて認識された車両と関連付ける標章情報関連付け部と、標章情報出力部と、を有する。
(もっと読む)
映像処理装置および方法
【課題】 監視カメラの映像では被写体の顔や人体としての特徴が検出しやすい方向に映るとは限らず、適切な追尾結果が得られるとは限らない。
【解決手段】 映像処理装置100は、映像から物体を検出する物体検出部102と、検出した物体を追尾する物体追尾部103と、軌跡管理部106と、映像から人体を検出する人体検出部104と、物体対応付部105とを有する。軌跡管理部106は、追尾した物体の軌跡を管理する。物体対応付部105は、物体検出部102により検出した物体と人体検出部104により検出した人体とを対応付け、軌跡管理部106は、追尾した物体が物体対応付部105により人体に対応付けられたことを管理する。
(もっと読む)
81 - 100 / 1,053
[ Back to top ]