
Fターム[5L096BA02]の内容
イメージ分析 (61,341) | 入力画像・用途の種類 (5,501) | 特定用途 (3,935) | 監視 (1,053)
Fターム[5L096BA02]に分類される特許
101 - 120 / 1,053
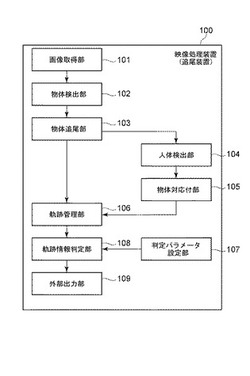
映像処理装置および方法
【課題】 監視カメラの映像では被写体の顔や人体としての特徴が検出しやすい方向に映るとは限らず、適切な追尾結果が得られるとは限らない。
【解決手段】 映像処理装置100は、映像から物体を検出する物体検出部102と、検出した物体を追尾する物体追尾部103と、軌跡管理部106と、映像から人体を検出する人体検出部104と、物体対応付部105とを有する。軌跡管理部106は、追尾した物体の軌跡を管理する。物体対応付部105は、物体検出部102により検出した物体と人体検出部104により検出した人体とを対応付け、軌跡管理部106は、追尾した物体が物体対応付部105により人体に対応付けられたことを管理する。
(もっと読む)
画像処理システム、撮像装置、画像処理装置及びそれらの制御方法、プログラム

【課題】ネットワークカメラと画像処理装置で構成される画像処理システムの物体検出精度を向上させる。
【解決手段】撮像装置は物体の確からしさを示す尤度を検出する。尤度が基準を満たす場合、指定した種類の物体として検出し、特定済の物体情報を生成する。尤度が基準を満たさない場合、暫定の物体情報を生成する。特定済の物体情報あるいは暫定の物体情報を統合した統合物体情報をネットワークを介して画像処理装置へ送信する。画像処理装置は、統合物体情報に含まれる暫定の物体情報によって指定される検出対象の物体領域について尤度を検出し、尤度が基準を満たす場合は、第2物体検出手段で指定した種類の物体として検出し特定済の物体情報を生成する。一方、尤度が基準を満たさない場合は物体情報を生成しない。統合物体情報に含まれる特定済の物体情報と、第2物体検出手段で生成した特定済の物体情報を結合し、特定済の物体情報として出力する。
(もっと読む)
移動体識別装置、移動体識別プログラム
【課題】移動体について、障害物があったとしても、情報処理量の少ない効率的な処理によって、通過数のみならず、その種類をも、移動体の速度にかかわらず極めて精度の良好な状態で識別可能な移動体識別装置、移動体識別プログラムを提供する。
【解決手段】 演算装置10は、複数種類の移動体の移動方向に交差する短冊画像52について取得し、各短冊画像52に属するライン画像において変化の有無に係るライン画像の境目の位置情報から位置変量を算出し、更にこれに基づき移動体の通過速度を算出して、各短冊画像52における通過速度に応じた幅の部分を参照し、当該部分を移動体の移動方向と逆の方向へ時刻順に結合して抽出パターン画像56を生成し、移動体の種類ごとに予め格納された登録パターン画像62と抽出パターン画像56とをDPマッチングにより比較して、登録パターン画像62の種類に係る移動体を識別する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】設置したカメラにおいて被写体検出の誤検出を抑制する。
【解決手段】画像から所定の被写体を検出する被写体検出手段302と、被写体検出手段302の誤検出情報を収集する誤検出収集手段303と、被写体検出手段302で被写体を検出した検出結果と誤検出情報とを照合して検出結果が誤検出であるか否かを判定する誤検出判定手段307とを備え、誤検出情報は、画像中の位置情報を含むものである。
(もっと読む)
容疑者を識別して追跡するシステム及びその方法
【課題】本発明は、容疑者を識別して追跡するシステム及びその方法を提供することを目的とする。
【解決手段】本発明の容疑者を識別して追跡するシステムは、モニターされたエリアのイメージを受信する受信モジュールと、イメージから追跡目標を選択する選択モジュールと、モニターされたエリアにおける追跡目標の移動方向及び移動距離を計算する目標追跡モジュールと、前記計算結果によって制御コマンドを生成して、追跡目標が常にカメラの視角範囲内に位置するようにカメラを移動させ、追跡目標に赤外線を照射し、赤外線の強度変化によってパルス信号を生成し、パルス信号をデジタル信号に変換するコマンド生成モジュールと、デジタル信号の周波数が人の平常の心臓鼓動頻度範囲を超えると、追跡目標が容疑者であると判断する判断モジュールと、を備える。本発明は、容疑者を識別して追跡する方法も提供する。
(もっと読む)
異物検出装置、異物検出方法、異物検出プログラム
【課題】屋外の構造物において、異物の混入を精度良く検出することを可能とする異物検出装置を提供する。
【解決手段】構造物を撮影した画像データを取得する画像データ取得部と、
第1の期間、及び前記第1の期間と異なる第2の期間に、前記画像データにおける前記構造物の領域の輝度よりも高く、かつ輝度分布が一様な特定の領域を検出した場合、前記特定の領域の面積を算出する面積算出部と、
前記第1の期間で算出した特定の領域の面積と、前記第2の期間で算出した特定の領域の面積との差分の絶対値が、予め決定される所定の閾値よりも大きい場合に異物が混入したと判断する異物検出部とで構成する。
(もっと読む)
画像における移動物体の追跡方法及び装置
【課題】画像上で背景が動いても移動物体を追跡可能にする。
【解決手段】撮像装置により移動体の時系列フレーム画像を取得してメモリに格納し、これらから空間的差分フレームを生成する。更に該空間的差分フレーム画像の各画像を、複数画素からなるブロックに分割し、背景画像も移動物体の1つとみなして、ブロック単位で移動物体の識別符号を付与するとともにブロック単位で該移動物体の動きベクトルを求め、移動物体を追跡可能とする。
(もっと読む)
物体検知装置、物体検知方法、監視カメラシステム、およびプログラム
【課題】カメラを設置したシーンに対するパラメータを設定して物体と外乱の区別を精度よく行う。
【解決手段】画像データを取得する画像取得部と、画像データを構成する部分領域ごとに特徴量を抽出する特徴抽出部と、対象物体を含まない背景画像データから特徴抽出部により抽出された特徴量を、背景特徴量として部分領域ごとに記憶する背景特徴量記憶部と、部分領域ごとに、抽出された特徴量と背景特徴量とを比較して、部分領域のそれぞれが対象物体であるか否かを判定する第1の物体領域判定部と、第1の物体領域判定部による複数の判定結果に基づいて、部分領域ごとにパラメータを決定するパラメータ決定部と、決定されたパラメータと、第1の物体領域判定部による判定結果とに基づいて、部分領域が対象物体であるか否かを判定する第2の物体領域判定部と、を備える。
(もっと読む)
侵入物体検出装置
【課題】監視領域内に存在する植栽の前を移動する侵入物体を検出するとともに、植栽の揺れによる誤検出を抑制できる侵入物体検出装置を提供する。
【解決手段】侵入物体検出装置100は、監視領域を撮影した監視画像を取得する撮像部10と、監視領域に侵入物体が存在しない状況において監視領域を撮影した画像である背景画像と、植栽が撮像されている画像上の領域を示す植栽領域を記憶する記憶部20と、監視画像と背景画像の差分によって、輝度値が変化した変化領域を抽出する変化領域抽出手段31と、変化領域について、変化領域が植栽領域と重なっている場合に重なっていない場合より侵入物体らしさが低くなる侵入物体らしさの度合いを表す侵入物体属性値を算出し、侵入物体属性値に基づいて変化領域が侵入物体によるものか否かを判定する判定手段36を有する。
(もっと読む)
画像センサ
【課題】侵入物体よりも撮像部に近い位置に発生する外乱を侵入物体と誤判定することを抑制できる画像センサを提供する。
【解決手段】画像センサ100は、監視領域を撮影した監視画像を順次取得する撮像部10と、監視画像と背景画像から変化領域を抽出する変化領域抽出手段31と、変化領域が侵入物体の性質を持つ度合いを侵入物体属性値として算出する侵入物体属性値算出手段32と、変化領域が侵入物体以外の外乱である特定外乱の性質を持つ度合いを外乱属性値として算出する外乱属性値算出手段33と、外乱属性値の高い変化領域が所定時間内に所定頻度で重なって現れる領域を外乱領域として設定する外乱領域抽出手段35と、変化領域毎に変化領域が侵入物体か特定外乱かを判定する判定手段36を有し、判定手段36は、変化領域が外乱領域に重なる割合が大きいほど侵入物体と判定し難くする。
(もっと読む)
目標追跡装置、目標追跡方法
【課題】目標追跡装置において、追跡目標が遮蔽物に遮蔽された後、さらに遮蔽物が重なった場合における追跡目標の追跡精度を高める。
【解決手段】追跡目標指定受付部と、追跡対象設定部と、入力画像内において、追跡対象設定部によって設定された追跡対象を追跡する追跡処理部とを備え、追跡対象設定部は、追跡目標を認識した場合は、追跡目標を追跡対象として設定し、追跡目標が遮蔽物に遮蔽された場合は、遮蔽物を追跡対象として設定し、追跡対象として設定されている遮蔽物が、他の遮蔽物と少なくとも一部が重なった場合は、それぞれの遮蔽物の動きベクトルと追跡目標の動きベクトルとの差に基づいて算出される各遮蔽物が追跡目標を遮蔽する推定遮蔽時間に基づき、その遮蔽物の重なり時点における残り時間が長い方の遮蔽物を追跡対象として設定する。
(もっと読む)
目標追跡装置、目標追跡方法
【課題】目標追跡装置において、追跡目標が遮蔽物に遮蔽され、遮蔽物が追跡対象となっている場合における追跡目標の検出精度を高める。
【解決手段】追跡目標指定受付部と、追跡対象設定部と、撮像装置から連続して入力される入力画像内において、追跡対象設定部によって設定された追跡対象を、サイズ情報を含む検出情報を基準に検出して追跡する追跡処理部とを備え、追跡対象設定部は、入力画像内において追跡目標を認識した場合は、追跡目標を追跡対象として設定し、入力画像内において追跡目標が遮蔽物に遮蔽された場合は、遮蔽物を追跡対象として設定するとともに、遮蔽物と追跡目標とのサイズ比を取得し、追跡対象となっている遮蔽物の入力画像内でのサイズ変動と取得したサイズ比とに基づいて追跡目標の検出情報に含まれるサイズ情報を更新して、追跡目標の再出現を検出する。
(もっと読む)
駐車検出装置、駐車検出方法および駐車検出プログラム
【課題】多数の駐車マスを持つ駐車場の各駐車マスの駐車状況を正確に検出することができる駐車検出装置、駐車検出方法および駐車検出プログラムを提供する。
【解決手段】駐車検出装置は、表示パターンが描かれた複数の駐車マスを含む検出対象エリアを撮影する撮影手段と、空車状態の検出対象エリアの画像に対してエッジ抽出処理を施して基準画像データを生成する基準データ生成手段と、対象画像に対してエッジ抽出処理を施して対象画像データを生成する対象データ生成手段と、表示パターンの位置を中心として基準画像データを所定範囲でシフトさせ、その各位置において基準画像データと対象画像データとの相関率を算出することにより、各位置に対する相関率の分布を相関率分布として得る相関率分布算出手段と、相関率分布の特徴に基づいて駐車の有無を判定する判定手段と、を備えている。
(もっと読む)
煙検出用周波数成分特定方法、および煙検出装置
【課題】フーリエ変換処理を用いることなく、煙のゆらぎスペクトルの周波数成分を簡易的に求め、気流に流される煙を検出する。
【解決手段】監視カメラにより時系列で撮像された複数の画像からなる時系列データに基づいて、注目領域において、異なるサンプリング間隔によるフレーム差分画像を生成する差分画像生成手段21と、異なるサンプリング間隔で生成されたそれぞれのフレーム差分画像ごとに、注目領域の差分量を算出する差分量算出手段22と、算出されたそれぞれの差分量の中で、最大となる差分量に対応するサンプリング間隔の逆数を、注目領域の時間スペクトルのピークを示す周波数成分として特定する対象周波数成分特定手段23とを備える。
(もっと読む)
瞳孔検出装置及び瞳孔検出方法
【課題】検出対象画像が低解像度であっても瞳孔検出精度を向上することができる瞳孔検出装置及び瞳孔検出方法を提供すること。
【解決手段】瞳孔検出装置100において、目領域実寸算出部102が、目領域の実スケール値を取得し、瞳孔状態予測部103が、瞳孔径の実スケール予測値を算出し、必要解像度推定部105が、算出された実スケール予測値に基づいて、解像度のターゲット値を算出し、目領域画像正規化部107が、算出された解像度のターゲット値及び目領域の実スケール値に基づいて、拡大/縮小倍率を算出し、算出された拡大/縮小倍率に基づいて目領域の画像を正規化し、瞳孔検出部108が、正規化された目領域の画像から瞳孔画像を検出する。
(もっと読む)
画像処理装置、及び画像処理方法
【課題】 背景差分法により移動体を検出する際にメモリに格納する画像データ量を大きく削減できる画像処理装置、及び画像処理方法を提供する。
【解決手段】 動画像を取得する画像データ入力部1と、動画像の個々の画像フレームを複数エリアに分割し、分割した個々の小画像に対して画素毎に予め設定した複数階調の輝度の何れかに分類して頻度のヒストグラムを生成するヒストグラム生成部2と、生成したヒストグラムの個々の階調の頻度を2値に畳み込む畳み込み処理部3と、時系列の複数の画像に対して畳み込み処理部3が畳み込んだ個々のデータを平均化して統計データを算出する統計データ算出部4と、算出した統計データを記憶するメモリ7と、記憶している統計データと、新たに入力された画像フレームの畳み込みデータとを比較し、データの変化量から個々の小画像内の移動体の有無を識別する移動体領域識別部5とを備える。
(もっと読む)
画像セキュリティシステム
【課題】セキュリティ機能が強化されたセキュリティシステムを提供する。
【解決手段】個人情報入力装置31から入力されたユーザの個人情報は、ネットワーク40経由で権限照合部211に出力される。権限照合部211は個人ID記憶装置221に記憶された個人情報と照合を行うとともに、個人情報に対応する移動経路キーを移動経路キー記憶装置222から取得する。画像検索部212は、個人情報に対応するキー画像をキー画像記憶装置223から取得し、キー画像に基づいて複数の画像記憶装置12を検索し、カメラ11で撮影されたユーザの画像を複数取得する。移動経路生成部213は、検索されたユーザの画像に基づいてユーザの移動経路情報を生成する。解除判定部214は、生成された移動経路情報と移動経路キーとが一致する場合、電子ロック装置を解除させる。
(もっと読む)
撮像装置、物体検出方法及び姿勢パラメータの算出方法
【課題】特定のランドマークを設置しないでも、精度良く撮像装置の姿勢パラメータを取得可能な姿勢キャリブレーションを実現する。
【解決手段】撮像部により撮像された画像に含まれる物体を検出し、検出された少なくとも2つの物体について、それぞれ撮像された画像における正立状態からの回転角度を算出し、算出された前記少なくとも2つの物体の回転角度から撮像装置の設置角度に関する姿勢パラメータを算出する。
(もっと読む)
流水監視システムおよび流水監視プログラム
【課題】監視対象にある水路の流水異常を経済的に有利な構成で効率よく検知し報知することができる流水量監視システムを提供する。
【解決手段】流水(Wb)部分を含む水路1の画像を撮影する単眼カメラ(一つのカメラ)11と、このカメラ11で撮影した水路1の画像をキャプチャするキャプチャ部12と、このキャプチャ部12でキャプチャした時系列の複数の画像から背景画像を作成し、背景画像の時系列に従う領域変化から水路1の流水量を判定する画像処理部13と、画像処理部13の判定結果の情報を出力する出力手段(表示部)19とを備える流水監視システム。
(もっと読む)
表示制御装置及び表示制御方法
【課題】 検知すべき物体によっては、物体の検知が困難となる場合があった。
【解決手段】 映像を表示する物体検知機能設定ツール101の検知枠設定部112は、映像内の物体検知領域を設定する(S401)。そして、面積比入力部113は、物体検知領域の面積に対する比率に関するパラメータを入力する(S402)。そして、サイズ枠決定部114は、設定された物体検知領域の面積と入力されたパラメータに基づいて物体検知領域内で検知する物体のサイズ情報を決定する(S404)。そして、決定されたサイズ情報に基づく検知サイズ枠を表示制御部111が表示させる(S406)。
(もっと読む)
101 - 120 / 1,053
[ Back to top ]