
Fターム[5L096BA02]の内容
イメージ分析 (61,341) | 入力画像・用途の種類 (5,501) | 特定用途 (3,935) | 監視 (1,053)
Fターム[5L096BA02]に分類される特許
21 - 40 / 1,053
顔認識装置、及び顔認識方法
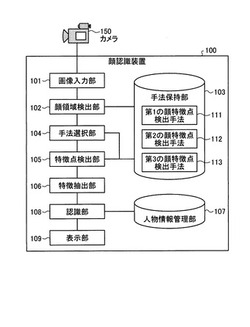
【課題】認識精度の低下を抑止する。
【解決手段】実施形態の顔認識装置は、記憶手段と、入力手段と、顔検出手段と、保持手段と、抽出手段と、認識手段と、を備える。記憶手段は、人物毎に、当該人物の顔の特徴が表された顔特徴情報を記憶する。入力手段は、人物の少なくとも顔を含む画像情報を入力する。顔検出手段は、入力手段により入力された画像情報から、人物の顔が表された顔領域を検出する。保持手段は、検出された顔領域から顔の特徴を検出処理する検出手法を、検出処理の粗さの違いに基づいて複数保持する。抽出手段は、保持された複数の検出手法のうち、いずれか1つ以上を用いて、顔検出手段により検出された顔領域から、顔の特徴を示した特徴情報を抽出する。認識手段は、抽出手段により抽出された特徴情報と、記憶手段に記憶された顔特徴情報とに基づいて、画像情報に含まれていた人物を認識する。
(もっと読む)
画像処理装置、画像処理方法、および、プログラム

【課題】誤検出を抑制した、頑強な不動体検出を行う。
【解決手段】取得される映像から、多項分布の背景モデルを生成し、背景を生成する生成部と、生成部により生成された背景モデルから、信頼度の高い背景が生成できるか否かを判断する判断部を備え、現画像において、生成される背景とは異なる部分の画像である動体が検出され、動体が、所定の一定時間以上停止しているかどうかが判定される。一定時間以上停止している動体である一時停止オブジェクトが映る一時停止画像と、現画像とが用いられて、現画像の画素について、所定の時間以上変化がない、背景とは異なる不動体であることの確からしさを表す不動体信頼度が求められる。求められた不動体信頼度に基づいて、現画像から、不動体が検出される。本技術は、例えば、物体の置き去りや持ち去り等を検出する不動体の検出に適用できる。
(もっと読む)
追跡装置、追跡方法およびプログラム
【課題】対象物が動くことにより画像にぶれが生じた場合でも、安定して対象物を追跡することが可能な追跡装置、追跡方法およびプログラムを提供する。
【解決手段】実施形態の追跡装置は、取得部と第1算出部と第2算出部と設定部とを含む。取得部は、追跡対象物を撮像して、時系列のフレーム単位で画像を取得する。第1算出部は、画像内の探索領域に含まれる各画素について、当該画素の画素値と基準値との一致度を示す第1尤度を算出する。第2算出部は、探索領域内の各画素について、当該画素の画素値と、過去のフレームにおける画像内の当該画素に対応する位置の画素値との差分を示す差分値を算出する。第1設定部は、探索領域内の各画素について、当該画素と、過去における追跡対象物の位置との距離が大きいほど、第1尤度の重みが小さくなるとともに差分値の重みが大きくなるように、第1尤度および差分値の各々の重みを設定する。
(もっと読む)
外界認識方法,装置,および車両システム
【課題】物体までの距離によらず好適に,車両等の物体検出を行う。
【解決手段】自車周辺を撮影した画像を解析する外界認識装置100は,近傍を表す画像の第一領域,および遠方を表す画像の第二領域を設定する処理領域設定部101と,設定された第一領域において第一の識別器103により物体検出を行う第一の物体検出部104と,設定された第二領域において第二の識別器106により背景パターンをも考慮して物体検出を行う第二の物体検出部104と,検出された物体矩形を補正する矩形補正部107と,検出された物体矩形に基づき衝突までの予測時間を算出する衝突予測時間算出部108を備える。
(もっと読む)
画像処理装置、方法、プログラム、および監視システム
【課題】監視対象者の一定時間の行動状態を把握する。
【解決手段】短背景生成部123が、滞在者が動くとき、滞在者の当該動いた部分がフレーム間で撮像画像における同一位置にいなくなるように設定されたフレーム数間引きした、複数フレームの撮像画像から短背景画像を生成し、背景生成部124が、滞在者がフレーム間で短背景画像における同一位置にいなくなるように設定されたフレーム数間引きした、複数フレームの短背景画像から背景画像を生成し、変化検出部125が、短背景画像と撮像画像の差分から変化抽出画像を生成する。そして、継続検出部126が、短背景画像と背景画像の差分から継続抽出画像を生成し、滞在者検出部122が、変化抽出画像と、継続抽出画像から監視対象者である滞在者の状態を示す情報を算出する。
(もっと読む)
監視装置、その方法、及び、そのプログラム
【課題】監視対象物が移動しても確実に追従できる監視装置を提供する。
【解決手段】監視対象物を指し示す指示部22と、前記監視対象物を撮像して時系列の画像を取得するカメラ12と、前記時系列の画像から複数の特徴点を抽出すると共に、前記各特徴点の移動量を算出し、予め設定された基準移動量より前記移動量が大きな特徴点の第1の集合の移動先位置Bを予測する予測部14と、前記時系列の画像間の差分に基づいて変化領域を抽出し、前記変化領域の重心位置Oを検出する検出部16と、前記平均移動量が第1の閾値と比較して大きい場合には前記移動先位置Bを指示位置と設定し、小さい場合には前記重心位置Oを指示位置と設定する判定部18と、前記指示部が前記指示位置を指し示すように前記指示部を制御する制御部20とを有する。
(もっと読む)
移動物体追跡装置及び参照点追跡方法
【課題】移動物体上のある点に対して移動物体の移動速度方向から所定角度だけ回転した方向に所定長離れた点の位置を精度良く把握可能な移動物体追跡装置を提供する。
【解決手段】移動物体の所定の部位を画像追跡点として撮像し、取得した画像追跡点の画像データより、追跡のための追跡原点座標と移動物体の画像追跡点の座標との差異を表す追跡誤差を得る。この追跡誤差に基づいて、追跡角速度に移動物体に対する撮像器の追従遅れを補正した視軸角速度を算出する。同時に、移動物体との間の相対距離と、移動物体追跡装置自身の移動速度を計測する。得られた視軸角速度と相対距離と移動物体追跡装置自身の移動速度に基づいて、画像追跡点から移動物体の移動速度方向から所定の角度だけ回転した方向に所定長さだけ離れた参照点を追跡するための参照点追跡角度を算出する。
(もっと読む)
閉瞼を分類するための方法
【課題】乗り物の操作者コンパートメント内に位置決めされた操作者を監視する画像センサからの生理学的データの部分の信頼性を向上させる
【解決手段】画像センサから、操作者の目、顔、頭、腕、および身体の動きのうちの少なくとも1つに関係する情報を包含する生理学的データを受信するステップと、前記生理学的データに基づいて、少なくとも操作者の閉瞼、目の動き、または頭の動きの徴候の識別を行なうステップと、生理学的データおよび操作者コンパートメント内における照明条件のうちの少なくとも1つと、現在の操作者の状態についてのあらかじめ決定済みの規則のセットとの比較を行なうステップと、閉瞼、目の動き、および/または頭の動きのタイプを、識別による閉瞼、目の動き、および/または頭の動きと比較の結果を相関させることによって分類するステップと、を包含する。
(もっと読む)
物体検出方法
【課題】監視領域に人、車の両方が入ってくる環境において、監視領域に車が存在することを、差分、二値化、ノイズ除去、ラベリング、大きさ判定処理で行った場合には、二値化のしきい値は環境変化に応じて高くなったり、低くなったりするため、二値化しきい値によっては、1つの物体が複数に分かれて検出されることにより、個々のサイズが小さくなり、車が存在することを認識することができなかった。
【解決手段】正規化相関を使用することで物体の存在領域の認識精度を向上する。この結果、監視領域に車が存在するときには誤検知防止のために処理を停止し、車が存在しないときに侵入者の検知を行う場合、正規化相関処理、差分処理を組合せることにより、車が存在することを認識する性能を向上した。
(もっと読む)
エレベータの乗降検出装置およびエレベータ装置、並びにエレベータの乗降検出方法
【課題】かごに対する人および物体の出入りを検出して、かご容積に対する人および物体の占有率を低コストかつ高精度に算出するエレベータの乗降検出装置、検出結果に応じてエレベータを駆動するエレベータ装置、並びにエレベータの乗降検出方法を得る。
【解決手段】エレベータの出入り口に設けられ、出入り口を通過する人および物体を線状画像としてそれぞれ検出する第1、第2ラインセンサ11a、11bと、第1、第2ラインセンサ11a、11bで検出された線状画像から、人および物体の投影面積を算出する投影面積算出部131と、第1、第2ラインセンサ11a、11bで検出された線状画像から、人および物体の移動方向を判定する移動方向判定部132と、投影面積および移動方向に基づいて、エレベータのかご容積に対する人および物体の占有率を算出する占有率算出部133とを備えている。
(もっと読む)
動体追跡装置
【課題】複数動体が交差しても、効率的かつ正確に動体追跡する。
【解決手段】時系列の連続原画像P(i)からなる動画を画像入力部110で入力し、動体識別画像生成部130により、背景画像との差分をとり、背景と前景を区別する動体識別画像M(i)を生成する。トラッカー格納部150は、個々の動体の輪郭に外接するブロッブ包摂図形を、時系列で格納する。マスキング処理部140は、トラッカー格納部150内の時刻t(i−1)の着目動体Tj以外の動体のブロッブ包摂図形を利用して、動体識別画像M(i)の前景領域をマスキングする。ブロッブ包摂図形抽出部170は、マスキング部分を除く前景領域の輪郭を候補ブロッブ包摂図形として抽出する。トラッカー登録部160は、着目動体Tjの先行ブロッブ包摂図形Bj(i−1)に対する後続ブロッブ包摂図形Bj(i)を候補ブロッブ包摂図形の中から選択し、トラッカー格納部150に登録する。
(もっと読む)
身長推定装置、身長推定方法、及び身長推定プログラム
【課題】画像上で人物の足元位置が隠蔽されていても当該人物の身長を精度よく推定する。
【解決手段】撮像部130は、対象人物を含む画像を時系列で撮像する。頭部検出部141は、時系列で撮像された画像それぞれから対象人物の頭部を検出する。足元位置推定部143は、検出された頭部を用いて、時系列で撮像された画像それぞれから対象人物の足元位置を仮定身長毎に推定する。実空間位置推定部145は、推定された足元位置を用いて、対象人物の実空間上の位置を仮定身長毎に時系列で推定する。身長推定部147は、仮定身長毎に、推定された実空間上の時系列の位置を用いて人間らしい移動軌跡を作成し、最も人間らしい移動軌跡が作成された仮定身長を対象人物の身長に推定する。
(もっと読む)
移動体検出装置、コンピュータプログラム及び移動体検出方法
【課題】移動体を高い精度で検出することができる移動体検出装置、コンピュータプログラム及び移動体検出方法を提供する。
【解決手段】検出ブロック設定部107は、撮像画像上で複数の画素で構成される任意の大きさの検出ブロックを複数設定する。評価値算出部109は、任意の時点tの撮像画像上で、設定した各検出ブロックが移動体の候補領域であるか否かを評価する評価値を検出ブロック毎に算出する。選択部110は、算出された評価値に基づいて、候補領域であると評価された1又は複数の検出ブロックを選択する。移動体領域検出部112は、選択した検出ブロックの撮像画像上の位置及び大きさに基づいて、撮像画像上の移動体領域を検出する。
(もっと読む)
画像処理装置、画像処理方法、及び、プログラム
【課題】誤検出を抑制した、頑強な不動体検出を行う。
【解決手段】動体検出部は、現画像において、背景とは異なる部分の画像である動体を検出し、一時停止判定部は、動体が、所定の一定時間以上停止しているかどうかを判定する。信頼度処理部は、一定時間以上停止している動体である一時停止オブジェクトが映る一時停止画像と、現画像とを用いて、現画像の画素について、所定の時間以上変化がない、背景とは異なる不動体であることの確からしさを表す不動体信頼度を求める。不動体検出部は、不動体信頼度に基づいて、現画像から、不動体を検出する。本技術は、例えば、物体の置き去りや持ち去り等を検出する不動体の検出に適用できる。
(もっと読む)
監視システム、および、混雑率算出方法
【課題】監視システムで、列車の車内などを効果的に監視する。
【解決手段】監視カメラ111〜114によって撮像された映像データ或いは記録装置に記録されている映像データを基に、車両内に存在する人物を検出し、その人物が車両をどれくらい占める割合で検出されたかにより、乗車率Aを判定する。また、監視カメラ111〜114によって撮像された映像データ或いは記録装置に記録されている映像データを基に、乗降車する人数を計測し、最大乗車可能人数に対する現在乗車している人数により、乗車率Bを判定する。そして、これら2通りの方法で算出された乗車率から、平均値を取る等して精度の高い乗車率を判定する。
(もっと読む)
検出装置及び検出方法
【課題】検出対象物の検出精度を向上させること。
【解決手段】センサーの出力に対応する階調値を含む検出対象画像を生成する画像生成部と、前記検出対象画像から検出対象物を検出することに用いる学習済みの識別器を有する検出部と、を含み、前記識別器は、前記検出対象画像における任意の2つの領域の階調値に基づいて前記検出対象画像における前記検出対象物の検出を行う複数のサブ識別器を有し、前記検出部は、前記複数のサブ識別器に対して、前記検出対象物の複数の領域のうち対応する2つの領域の階調値を入力し、前記複数のサブ識別器の出力に基づいて前記検出対象画像における検出対象物の検出を行う、検出装置。
(もっと読む)
画像処理ユニット、および画像処理プログラム
【課題】生成する背景差分画像の精度の低下を抑えるとともに、装置本体にかかる処理負荷の増大も抑え、装置本体のコストダウンを図った画像処理ユニットを提供する。
【解決手段】メモリ4aは、代表画素毎に、その代表画素の特徴と、その代表画素の画素値の発生頻度をモデル化した背景モデルと、を関連付けて記憶する。画像処理部4は、画像入力部3に入力されたフレーム画像の画素毎に、その画素の特徴に対応する代表画素の背景モデルを探索する。画像処理部4は、この探索で得た背景モデルに基づき、背景が撮像されている背景画素、または背景でない物体が撮像されている前景画素のいずれであるかを判定する。画像処理部4は、画像入力部3に入力されたフレーム画像のいずれかの画素において、その画素が背景画素、または前景画素のいずれであるかの判定に用いた背景モデルを、この背景モデルを用いた画素の画素値に基づいて更新する。
(もっと読む)
人体動作の認識の方法、装置、及びプログラム
【課題】
異なる動作や異なる個体に対応する人体動作周期及び人体動作を特定すること。
【解決手段】
本発明は人体動作周期を特定し、及び人体動作を認識する方法並びに装置を開示する。ビデオにおける人体動作周期を特定する方法は、所定の探索範囲内において人体姿勢が現在のフレームと類似するフレームを探索し、探索範囲内において人体姿勢が現在のフレームと類似するフレームを探索できた場合に、現在のフレームと前記人体姿勢が現在のフレームと類似するフレームとの間の時間長さをビデオにおける人体動作周期とすることを含む。異なる動作や異なる個体に対して、相応する人体動作周期を特定することによって、時間的・空間的特徴をより正確に抽出し、より正確な人体動作の認識を実現することができる。
(もっと読む)
人体動作周期の特定と人体動作の認識の方法、装置、及びプログラム
【課題】
ビデオにおける人体動作周期を特定し、人体動作を特定すること。
【解決手段】
本発明は、人体動作周期を特定し、及び人体動作を認識する方法及び装置を提供する。前記ビデオにおける人体動作周期を特定する方法は、探索範囲内の各フレームの人体領域を複数の人体部分に区分する処理と、現在のフレームにおける各人体部分の局所動作周期を特定する処理と、前記局所動作周期に基づいて現在のフレームにおける人体動作周期を特定する処理とを含む。異なる動作や異なる個体に対して適応して人体動作周期を特定することによって、時間的・空間的特徴をより正確に抽出することができ、より正確な人体動作認識を実現することができる。
(もっと読む)
画像差分検出装置及び画像差分検出プログラム
【課題】差分画像を検出する画像間に位置ずれが発生しても意図した差分画像を検出できる画像差分検出装置及び画像差分検出プログラムを提供することを課題とする。
【解決手段】撮影手段により撮影された画像間の差分を検出する画像差分検出装置10であって、異なるタイミングで撮影された第1及び第2の画像の何れか一方をシフトしながら第1及び第2の画像間の差分画像を検出する画像差分演算手段32と、第1及び第2の画像間の差分画像のうち、第1及び第2の画像間の差が最も少ない差分画像を出力する画像差分評価手段33と、第1及び第2の画像間の差が最も少ない差分画像と第1又は第2の画像とを合成した合成画像を出力する画像合成手段34とを有することにより上記課題を解決する。
(もっと読む)
21 - 40 / 1,053
[ Back to top ]