
Fターム[5L096BA02]の内容
イメージ分析 (61,341) | 入力画像・用途の種類 (5,501) | 特定用途 (3,935) | 監視 (1,053)
Fターム[5L096BA02]に分類される特許
61 - 80 / 1,053
対象物の認識システム、見守りシステム、監視システム
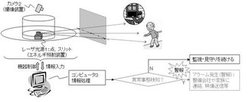
【課題】エネルギ照射装置と2次元撮像装置を用いることで、種々の条件下で頑健に動作する対象物認識システムおよび見守りシステム、監視システムを提供する。
【解決手段】観測対象となる空間に向けて、所定の位置から照射方向を変えながら、エネルギを照射する照射手段と、照射手段で照射されたエネルギの反射エネルギを2次元的に感知し、対象となる空間を2次元的に撮像する撮像手段と、撮像手段で撮像した撮像画像上の切断曲線の特徴を用いて対象物の認識を行う認識手段とを備える対象物認識システムおよび該システムを備える見守りシステム、監視システム。
(もっと読む)
画像処理装置

【課題】監視画像から背景画像を生成する画像処理装置において、監視空間内に似た色の服を着た人物が多く往来していたり、滞留する人物がいたりすると、生成した背景画像の一部に人の画素値が混入することがあった。
【解決手段】背景モデル生成部は、注目時刻より過去の入力画像の画素値から、注目画素300の特徴量の頻度分布330を生成し、当該頻度分布からなる背景モデルを生成する。背景特徴選出部は、注目画素300、近傍画素320の頻度分布330,340において集中度が最大ピークとなる正規分布331,342をそれぞれの画素の位置での背景特徴量として抽出する。背景モデル修正部は、注目画素300の頻度分布330のうち、近傍画素320の背景特徴量として選出される正規分布342に対応するものである正規分布332の頻度を高める修正を行う。
(もっと読む)
異常パターンの発見
【課題】 異常パターン発見のための方法、システム及び製造物品を提供する。
【解決手段】 複数の異なるグリッドに分割されたビデオ・データ画像フィールドにおいてオブジェクトの移動の軌跡が追跡される。ビデオ・データから軌跡に関する大域的画像特徴を抽出し、これを学習軌跡モデルと比較して、学習軌跡モデルへの適合性の関数として大域的異常検出信頼度判定値を生成する。また、オブジェクト軌跡を含む画像フィールド・グリッドの各々についての局所的画像特徴を抽出し、これをグリッドについての学習特徴モデルと比較して、グリッドの学習特徴モデルへの適合性の関数として各々のグリッドについての局所的異常検出信頼度判定値を生成する。大域的異常検出信頼度判定値をグリッドについての局所的異常検出信頼度判定値に融合させて、追跡されるオブジェクトに関する融合異常判定とする。
(もっと読む)
対象物追跡装置、対象物追跡方法、および制御プログラム
【課題】追跡対象の追随性と処理速度の高速化を両立できる対象物追跡装置を実現する。
【解決手段】この物体追跡装置は、第1フレームにおいて対象物の詳細輪郭モデルを生成する詳細輪郭モデル生成部30と、第2フレームにおいて複数の探索位置を設定する探索位置設定部31と、上記複数の探索位置の各々において上記詳細輪郭モデルからラフ輪郭モデルを生成するラフ輪郭モデル生成部32と、上記ラフ輪郭モデルの上記詳細輪郭モデルに対する尤度を判定する尤度判定部33と、上記尤度判定部33により判定された尤度に基づいて、上記複数の探索位置の中から探索位置を絞り込む探索位置絞込部34と、上記探索位置絞込部により絞り込まれた探索位置の中から、上記第2フレームにおける上記対象物の位置を特定する対象物位置特定部36とを備える。
(もっと読む)
情報処理装置、情報処理方法及びプログラム
【課題】複数の遮蔽物が重なり合って見える環境であっても、安定した物体追跡を可能にすることを目的とする。
【解決手段】画像から追跡対象を検出し、追跡する情報処理装置であって、追跡対象を検出できなかった場合に追跡対象が物体によって遮蔽されたか否かを判定する判定手段と、判定手段で追跡対象が物体によって遮蔽されたと判定された場合、画像より物体の領域と、物体と重複する物体の領域と、を抽出する抽出手段と、抽出手段で抽出された領域を関連付け、関連付けた領域に基づいて、次に追跡対象が現れる領域を設定する設定手段と、を有することによって課題を解決する。
(もっと読む)
画像処理装置、画像処理方法および画像処理プログラム
【課題】画像内の物体を安定して追尾すること。
【解決手段】画像処理装置100は、追尾対象となる物体の複数の部分テンプレートと、テンプレート画像とを比較して、領域毎の相関値を算出する。画像処理装置100は、相関値に基づいて、部分テンプレートに類似する画像領域を仮説領域として抽出する。画像処理装置100は、複数の仮説領域を重複しないように組み合わせた全体仮説を生成し、相関値や誤差を基にして、全体仮説の評価値を算出する。画像処理装置100は、評価値を基にして、複数の全体仮説から最適な全体仮説を判定する。
(もっと読む)
対象物検出装置、対象物検出方法
【課題】処理負荷を大きくすることなく、検出対象物が遠近離れて複数存在する場合の検出精度を高める。
【解決手段】入力画像に関する撮像対象までの距離情報を取得する距離情報取得部と、距離情報に基づいて、入力画像に対して距離区分を設定する距離区分設定部と、距離区分毎に、探索ウィンドウのサイズを設定するウィンドウサイズ設定部と、距離区分毎に、設定されたサイズの探索ウィンドウを用いて入力画像のスキャンを行なうスキャン部と、探索ウィンドウ内から検出対象物の検出処理を行なう検出処理部とを備えた対象物検出装置。
(もっと読む)
検出装置、負荷低減方法およびプログラム
【課題】大きさがおおよそ同じである複数の物体がほぼ同一平面上に配置されている場合に、それら複数の物体を撮影した画像中の複数の物体像のそれぞれを検出する際の処理負荷が著しく増大してしまうのを回避する。
【解決手段】画像から相互に異なる複数の大きさの物体像のそれぞれを検出可能な複数の検出部を有する検出装置であって、画像の入力を受け付け、受け付けた画像を構成する画素データを当該画像の行毎に複数の検出部へ出力する画像分配部と、画像分配部にて受け付けられる画像中の複数の物体像のそれぞれの大きさと、当該複数の物体像のそれぞれの当該画像中の列方向の位置との関係を算出する算出部とを有し、画像分配部は、算出された関係に基づいて複数の検出部のうち当該行の画素データを出力する検出部を選択し、複数の検出部のそれぞれは、画素データを受け付けると、受け付けた画素データが示す画像から物体像を検出する。
(もっと読む)
オブジェクト追跡装置、方法、及びプログラム
【課題】オブジェクトを追跡する際に、オブジェクトの位置推定の精度を向上させる。
【解決手段】位置予測手段14は、2以上のフレーム画像間のオブジェクトの動きに基づいて、処理対象のフレーム画像におけるオブジェクトの位置を予測する。位置マップ生成手段15は、予測された位置の周辺の複数の位置とオブジェクトの存在確率を示す値との対応関係を位置マップとして生成する。特徴量計算手段16は、予測された位置の近傍の複数の位置のそれぞれでオブジェクトらしさを示す特徴量を計算し、アピアランスマップを生成する。位置推定手段17は、位置マップとアピアランスマップとを組み合わせ、処理対象のフレーム画像におけるオブジェクトの位置を推定する。
(もっと読む)
人物監視装置、人物監視方法、及びコンピュータプログラム
【課題】エリア内で動きのなくなった人物が当該エリア内に滞在していることと、当該エリアから退出したこととを正確に検出できるようにする。
【解決手段】作業者が滞在する可能性がある溶け込みエリアを設定する。アラーム通知伝文ANに含まれる作業者の数を超える数のレコードが在席管理テーブルにある場合、又は、アラーム解除伝文ACが送信されたときに在席管理テーブルのレコードがある場合であって、当該レコードの在席位置が溶け込みエリア内にある場合、当該レコードの溶け込み中フラグの値を「1」に設定する。その後、在席管理テーブルのレコード数を超える数のオブジェクトIDを含むアラーム通知伝文ANを受信すると、在席管理テーブルのレコードに含まれるIDと異なるオブジェクトIDの値に、溶け込み中フラグが「1」のレコードのIDの値を変更し、当該溶け込み中フラグの値を「0」にする。
(もっと読む)
動画処理装置及び動画処理方法
【課題】大気モデルに基づいて霧の天候のビデオを明瞭化させ、画面の視程を拡大し、かつ、画像のリアルタイム処理の要求を充分に満たす動画処理装置及び動画処理方法を提供する。
【解決手段】本発明の動画処理装置は、ビデオの霧除去過程において、ビデオを、メーンフレームとなるキーフレームと、サブフレームとなるノーマルフレームとに区分する。キーフレームに対し、距離パラメータとなるt(X)と天空点パラメータAとを改めて算出し、ノーマルフレームに対し、Aを算出せずキーフレームのAを利用する。ノーマルフレームの背景部分に対し、キーフレームに対応する領域のt(X)を利用し、ノーマルフレームの前景部分に対し、t(X)を改めて算出する。
(もっと読む)
移動物体追跡装置
【課題】監視空間内の移動物体を監視画像上にて追跡する装置において、複数の移動物体が接近した場合に取り違えを防止する処理を適切に行うことが容易ではない。
【解決手段】位置予測部51は複数の物体について現時刻における候補位置を過去位置から予測する。存在度算出部52は、注目物体に対して、複数の物体のうち当該注目物体を除いた他物体の候補位置の分布範囲に当該他物体の存在蓋然性を表す存在度を設定する。物体位置判定部53は、注目時刻の画像と、物体の画像特徴を抽出するための参照情報との対比により当該画像において注目物体の候補位置と対応する部分から注目物体の画像特徴が抽出される度合いに応じた評価値を当該候補位置に設定された存在度に応じて低めて算出し、当該候補位置の評価値から当該注目物体の移動先位置を判定する。
(もっと読む)
移動物体追跡装置
【課題】監視空間内の移動物体を時刻毎に生成した複数の予測位置に基づいて追跡する装置において、監視空間内の障害物の領域に設定された予測位置を画一的に排除すると物体位置の判定精度が劣化する。
【解決手段】ペナルティ設定部50は、障害領域に対応して障害物の高さに応じたペナルティ値を設定する。物体位置判定部53は、各予測位置に対応して画像から抽出される移動物体の特徴量に応じた評価値を算出し、当該評価値に基づいて物体位置を判定する。当該判定に際して、物体位置判定部53は各予測位置の評価値を当該位置でのペナルティ値に応じて低める補正を行う。
(もっと読む)
照明制御システム
【課題】撮像手段により撮像される所定範囲内の周期動作物体の有無にかかわらず、自動的に人体の検知精度を向上させることが可能な照明制御システムを提供する。
【解決手段】照明器具5と、所定範囲を撮像する撮像手段を具備する画像センサ1と、所定範囲内の人体の在否に基づいて照明器具5を制御する制御部2とを備える。制御部2は、複数の期間において画像センサ1により取得された各画像の差分画像群に繰り返し現れた物体を、周期的な動作をする周期動作物体と判定し、且つ、人体と判定せず、差分画像群に繰り返し現れた物体を周期動作物体と判定したのちに、画像センサ1により取得された画像の差分画像I30に基づいて所定範囲内の人体の在否を判定する。
(もっと読む)
対象物画像判定装置
【課題】三次元空間での対象物の像の存在を判定する対象物画像判定装置において、撮像される画像毎に投影処理を行い設置物による非隠蔽部分を求めるのは処理負荷が大きい。
【解決手段】時刻毎の画像にて対象物を追跡する動作に先だって事前処理を行う。事前処理では、監視画像にて対象物が設置物により隠蔽されずに投影される推定投影領域を、空間内の各位置に対象物モデルを配置して求め、当該位置と推定投影領域とを対応付けた推定投影領域データ42を予め記憶部4に保存する。追跡処理では対象物隠蔽推定部530は推定投影領域データ42を参照し、注目対象物の予測位置での推定投影領域を取得する。尤度算出部531及び物体位置算出部532は、推定投影領域の画像特徴から対象物の像の存在を判定する。
(もっと読む)
照明制御システム
【課題】比較的簡単な構成で、人の存在の有無の検知精度の向上と、人の存在の有無を検知する処理速度の向上とを両立可能な照明制御システムを提供する。
【解決手段】撮像デバイス1と該撮像デバイス1による画像を画像処理することにより人の存在を検知して検知信号を出力する画像処理部2とを備えた人検知センサ部5と、該人検知センサ部5からの検知信号に基づいて照明光を制御する制御部6とを有する照明制御システム10であり、画像処理部2は、上記画像の所定の範囲全体において人の存在を検知する第1の画像処理と、所定の範囲全体を複数の異なる特定の範囲に分割して当該特定の範囲ごとに人の存在を検知した回数を所定の時間の間において計数し、上記所定の時間の経過後は、上記所定の範囲全体よりも狭く、且つ上記計数された頻度が所定の頻度を超えた上記特定の範囲に対して人の存在を検知する第2の画像処理とを行う。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】領域情報の変更に対するユーザの作業負担を軽減することができるようにする。
【解決手段】背景画像更新部17は、画像取得部11で取得された画像を用いて、背景画像を逐次更新し、更新された最新の背景画像と、その所定時間前の背景画像とを背景画像保存部18に保存させる。領域情報変化判定部19は、最新の背景画像と、その所定時間前の背景画像とを比較し、比較結果に応じて背景画像のなかの所定の領域を示す領域情報を更新する。本発明は、例えば、監視カメラで撮像された画像を用いた監視装置に適用できる。
(もっと読む)
監視システム
【課題】監視システムで、列車の車内などを効果的に監視する。
【解決手段】監視システムで、撮像手段11〜16が所定の領域(車両A1内)を撮像し、占有割合検出手段が撮像手段により撮像された結果に基づいて所定の領域における所定の物(例えば、人物等)による占有の割合を検出する。一例として、占有割合検出手段は、撮像手段により撮像された結果に基づいて所定の領域における所定の物により占有される面積を検出し、所定の領域における基準の面積に対する検出された面積の割合を所定の領域における所定の物による占有の割合として検出する。
(もっと読む)
異常事態の検出システム
【課題】予め異常事態が起こりうると予想できる場合に限られることなく、異常事態の可能性の指標として顕著性を算出することができ、あるいは、異常事態の可能性が高い時点と場所の候補を検出することができる異常事態の検出方法を提供する。
【解決手段】各時空点に対応する値をもつ時空間データを入力する入力部と、所定の多数の時空点において時空間データの特徴を表すベクトルを抽出する特徴抽出部と、抽出されたベクトルの特徴の統計量を算出する特徴解析部と、特徴抽出部の結果と特徴解析部の結果に基づいて所定の多数の時空点における顕著性を算出する顕著性算出部を備える。
(もっと読む)
異常検知装置
【課題】拘束シーンのように複数人が密着して生じる異常を検知するのは困難だった。
【解決手段】互いに姿勢が異なる人物の形状を模した複数の姿勢別人物モデル211と、背景画像210とが予め記憶部21に記憶されている。撮像部20は監視空間を撮像して監視画像を出力し、変化領域抽出部220は背景画像210との比較により監視画像から変化領域を抽出し、姿勢判定部222は姿勢別人物モデル211のうち2以上を重ね合わせた複合形状を変化領域と形状比較して適合度を算出し、適合度が所定基準を超える姿勢の組み合わせを判定する。異常判定部223は姿勢判定部222により判定された姿勢の組み合わせが予め設定された異常な組み合わせと合致するときに異常信号を出力する。
(もっと読む)
61 - 80 / 1,053
[ Back to top ]